Short: Ran into, but fixed, ESP3D and touch plate issues. Shared Marlin 2.1.1 snapshot.
Long:
Currently pushing edits to a Marlin 2.1.1 snapshot to get my Octopus board working. Ideally, after figuring out correct settings, separate set of edits extending MarlinBuilder will happen.
Started out with Marlin 2.1.1 515DL snapshot generated by MarlinBuilder for SKR Pro dual endstop LR machine. Applied Octopus related edits shared earlier in this topic for Marlin 2.0.9.5. Currently builds and deploys, USB host can connect, send gcode and receive responses.
However… although ESP32U wifi module is running ESP3D, terminal gcode commands sent from the wifi module are not connecting/executing. Also, TFT isn’t displaying Wifi module messages, so digging into how they should be connecting (maybe serial and/or pinout changes needed?). Still learning/investigating…
2023/2/5 Edit: Fixed connectivity between Octopus and ESP3D, needed to edit configured serial ports and baudrate.
2023/2/11 Edit: Z probe isn’t working, no motion when G38.2 Z0. Strangely M119 reports ok before using G38.2, but then reports triggered afterwards, even though there’s no motion. Checked wiring, guessing firmware related, still investigating…
2023/2/12 Edit: Updated Marlin 2.1.1 snapshot with this commit
- Fixed Z Probe, wrong Z probe pin was configured, should’ve been PB7 == 23.
- Fixed Marlin serial2 wifi (3) baud rate back to 250000. Needed to update ESP3D settings to be the same rate (via ESP3D settings web ui).
- Investigating why file upload to SD isn’t possible. #define for SD was enabled, so can read Octopus SD card, can read/write to flash (very small…) but can’t write to SD via ESP3D. Obviously this is very pants.
2023/2/16 Status: Z probe not working for me, guessing I messed up firmware edit. M119 reports expected trigger/ok for plate. actively investigating will provide update… No movement when G38.2 Z0. Am sharing incase anyone’s using the firmware snapshot I shared in this topic
2023/2/21 Status: Fixed Z Touch Plate Probe by using #define Z_MIN_PROBE_PIN PG11 which is for Diag 3 connector, see commit. Learnt about some of Marlin’s internals along the way, bonus!
Was unable to get V1E touch plate to with with PB7. Figured out by temporarily littering code with traces… diff_no_probe_temp_traces.zip (2.7 KB)
Observed inconsistent read values, seemed-like/suspected PB7 was floating. Double checked schematic and saw pullup and pulldown resistors marked “NC” (not connected?). So, don’t think there’s any pullup/pulldown resistor on my Octopus for PB7. Used scope to confirm voltage hovers around 0.
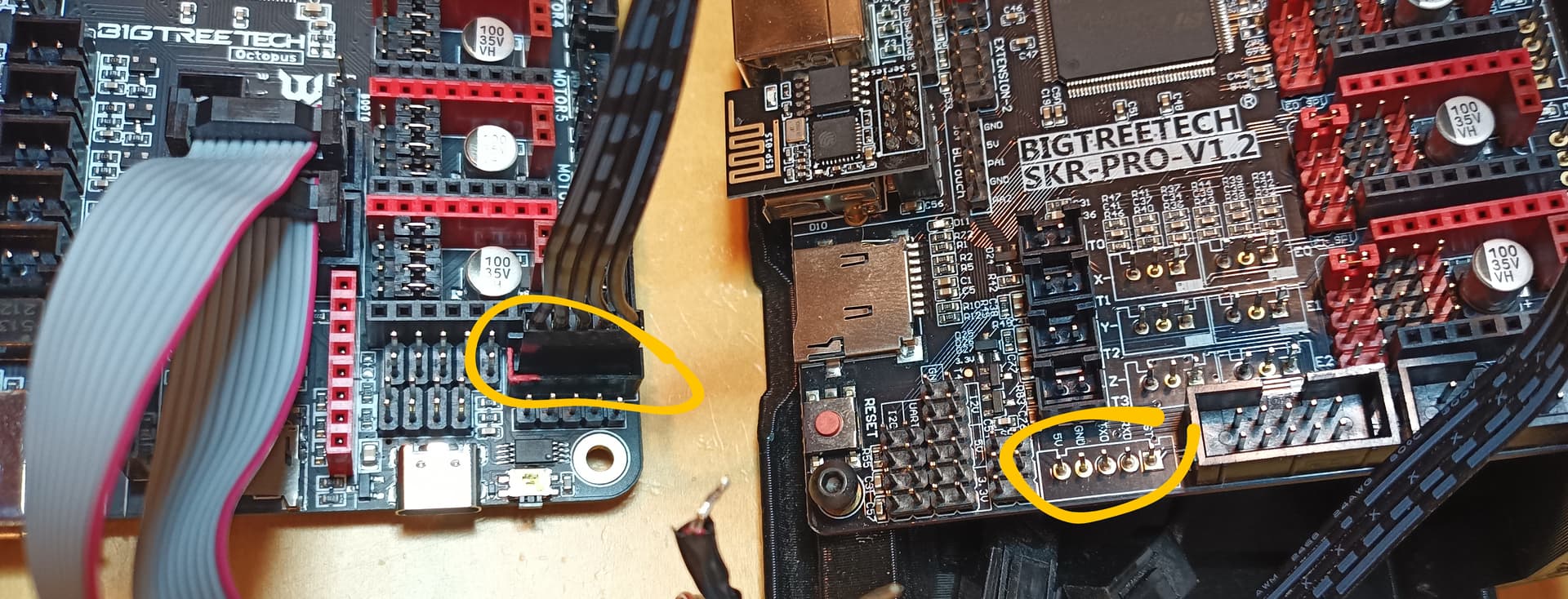
Where as the Diag 0 - Diag 7 connectors clearly have pullup resistors (per schematic), so am using those for endstops/touch-plate/switches.
If someone’s happily using PB7 for their touch plate, am curious to know how they wired up, did they add their own pullup resistor, or did I do something wrong, wiring/firmware?