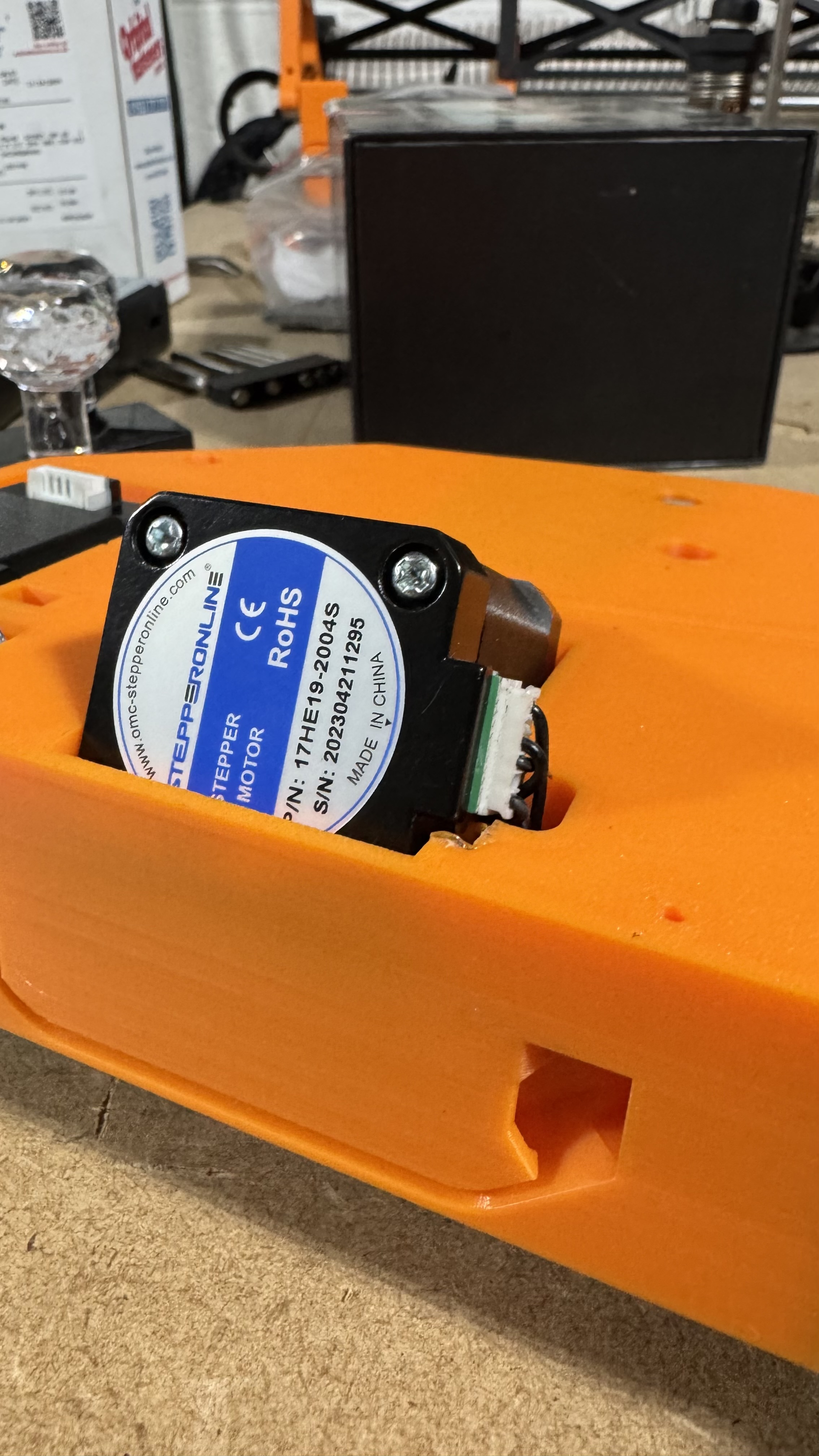
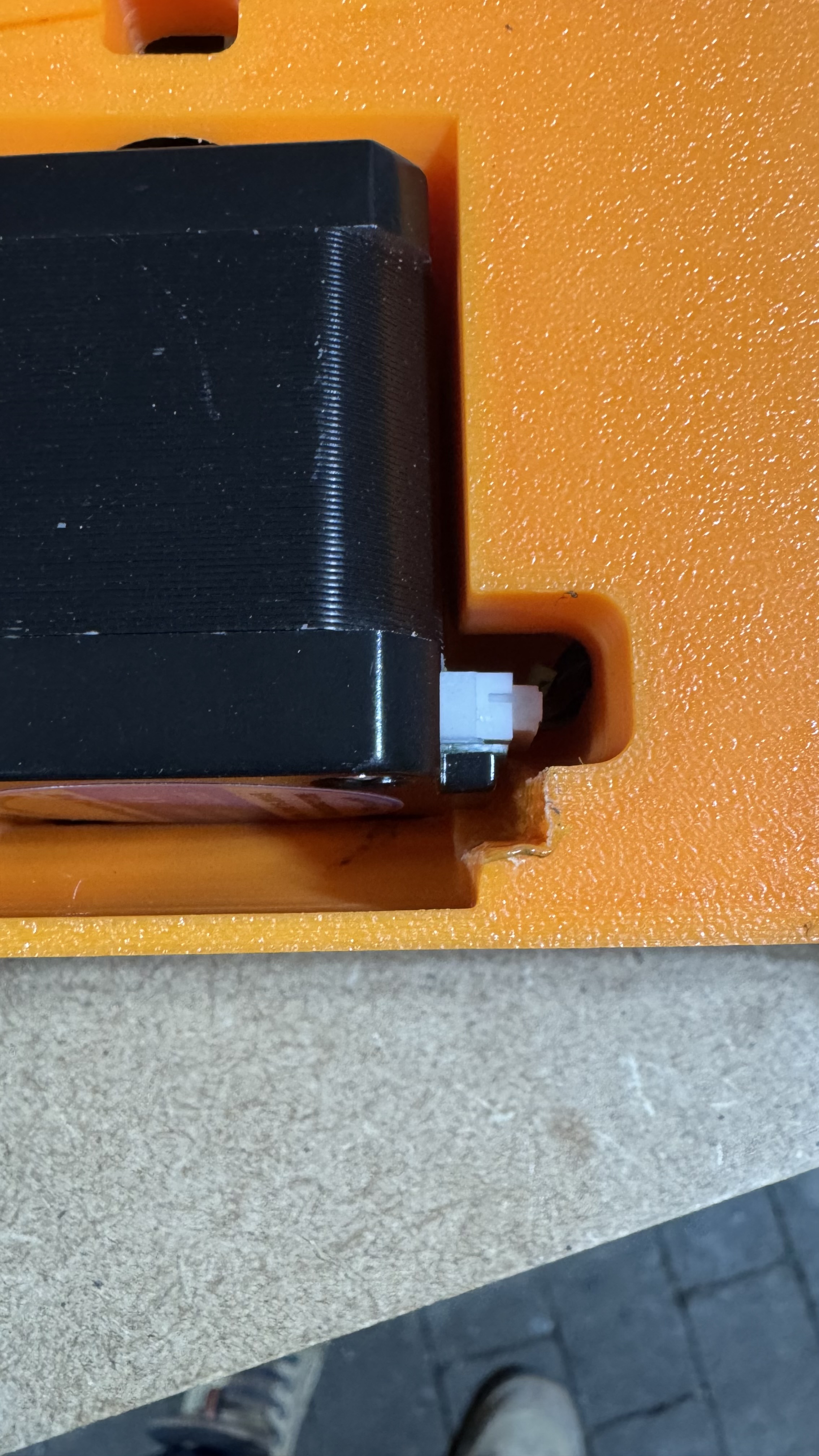
Here are the photo, as I promise



6 Likes
I’ve done only for Y axis motor, if you want I can do similar for Z as well, to be clear for you.
1 Like
By the way, separate from the question of the physical fit, your motors are wired differently from the usual motors that we use.
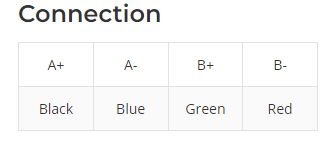

Normally, two pairs of adjacent wires on the 4-pin connector are connected to coils, but as listed from the store, the ordering on yours is different, where the first and third are one coil, and the second and fourth are another coil.
Since your wires are black, it seems you may have re-wired them already, but if not, you will want to check the wire ordering.
5 Likes
Thanks for mention, but I know, I already used them to previous LR version.
2 Likes
Thanks, will be great!
Sorry if this has been covered, but it appears the assembly instructions stop at just before the “Core” assembly? Are they not finished or am I missing something?
No, they are not done yet.
I will be putting up the core stuff in an hour or two, then starting on the beam stuff.
11 Likes
Oh and the shipping for the printed parts kits is nearly done. I had to sort every country into one of 8 price categories. Makes me think I need to do that for regular shipping as well.
4 Likes
I’m curious about the suggested attachment method of the beam to the side plates. My way was clumsy at best.
1 Like
One screw at a time?
6 Likes
I posted much earlier in this thread about my LRv3 prints and not knowing if I’ll have access to a printer for v4, but just discovered my new work site has a place with a couple Ultimaker s5 printers! I’ve been fidgeting with them and did a couple calibration cube prints (3dKaos V1E calibration cube, among a couple other skew calibration models). They’re not perfect, but wasn’t sure if anyone here knows how to calibrate an Ultimaker or are they closed gardens? From what I can tell it seems I’d have to load a different firmware, but seeing as it’s not my machine that’s not an option.
I’d buy Calilantern, but again, if there isn’t a way to calibrate the Ultimaker, I don’t know if there’s a point. I’m looking at max skew factors of XY: -0.004696353, XZ: -0.002375131, and YZ: 0.002368355 (One printer is bang on except for YZ: -0.002350416, but I’d like to use multiple printers if possible). Are those skew factors going to be okay?
2 Likes
I don’t know much about the ultimakers, I am pretty sure they run marlin so it is a possibility. You might have to compile your own firmware with it enabled though.
I don’t know about the skew factors what are the XZ YZ skew error percentages?
2 Likes
Can’t answer that at the moment with the calculations I have available. Purchased Calilantern and am about to print that off. Once I get that done I’ll know more. Hopefully it’s within reason because I don’t think flashing a new firmware is an option (again, not my machines, unfortunately).
3 Likes
Your build is going well.
Please do consider starting your own build thread so this great content is contained in a spot we can easily refer back to .
3 Likes
I’ve noticed you word it this way a few times and just so you don’t run into issues when you start to run the machine I wanted to mention this. The motor you made clearance for is the Z motor. Your Y motor is the one you were able to turn and make work.
Great job on your modification. Looks really good
3 Likes
Yes, you’re absolutely right, and I apologize for the oversight. This is a mechanical mistake, but even if there’s an error, it can be easily fixed by swapping the wires on the controller. I’m confident everything will work out fine.
3 Likes
Thanks for the suggestions, yes definitely I will hopefully this evening.
3 Likes
No need to apologize at all! I was just hoping to save you the hassle later ![]()
4 Likes
Is 6mm HPL a good material for the strut plates?
It will work but usually that is very soft material. MDF would probably be better.
4 Likes