I finished building my MPCNC about 3 months ago. It’s using a MiniRambo with the Full Graphic Smart Controller. I’d built a few things with it (just starting out cutting MDF) and built up some confidence, and everything was going fine. I am using a Makita RT0701C. I decided to start to put more items to cut into my runs to simplify things for my next project. This obviously resulted in longer run times (1 hour 30 minutes, previously I’d limited myself to half hour or so runs).
The cut starts fine, then after about 30 minutes or so the machine very rapidly moves along the x or y axis. I saw it do it the second time, it moved about 30 cm in maybe 2 seconds.
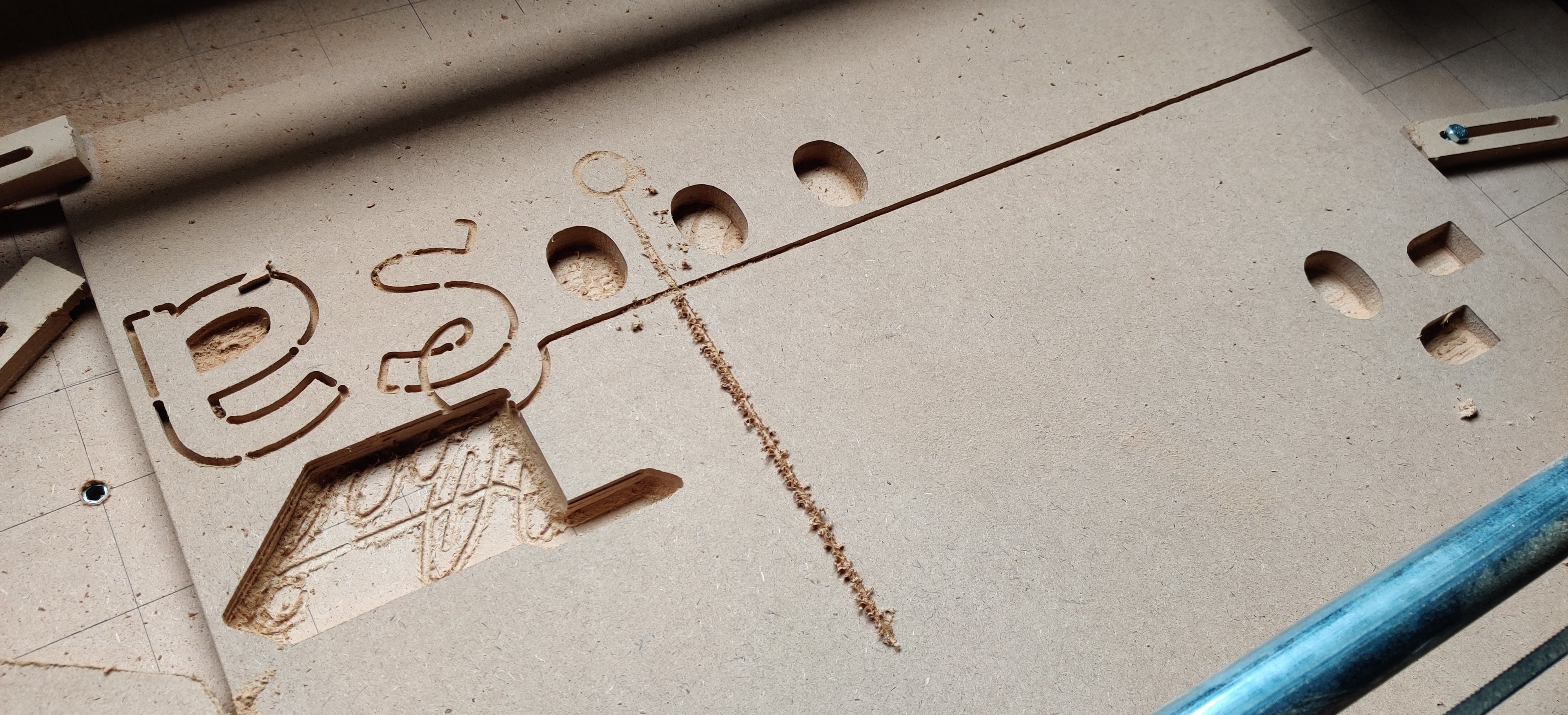
I tried to upload the images, but as a new user I am unable to do that. The first time it happened it was cutting around a letter S, then suddenly went off course, then moved straight along the x axis and got stuck against the end. I didn’t actually see this one happening. The second time I tried it, it was cutting out the dot for a letter i, then suddenly move straight down on the y axis, which I did see and was standing right there to cut the power.
I am using Estlcam to create my gcode files. Again I can’t upload or link to the two gcode files I used as well as the estlcam project file. The two gcode files are both trying to cut the same pieces, I just tweaked a couple of settings in the second one as well as moved things around to try and avoid the damage from my first cut.
Thank you anyone who can help me out, I really don’t understand what is causing this. As I said I watched it do it the second time and up until that point it appeared to be working fine.
I am wondering if your drivers are over heating. They will shut down for a bit when they do, like a minute. Do you have a fan on the mini? That is usually enough to keep them cool enough. You don’t need heat sinks, just a fan.
No there’s no cooling on the MiniRambo, so I guess that must be the problem. I didn’t run into it in the past because I never ran it long enough for it to heat up?
The first time I came across it and it was hard against it’s edge. I wasn’t paying that much attention to what it was doing, I just ran to cut the power.
The second time I cut the power straight away. After giving it a minute or so off I turned it back on and it appeared completely fine.
Not sure of where you live, but we’re also getting into the summer in most places in the US. This usually means hotter temps in the shop/garage where we’re running these things… Unless you’re lucky enough to have AC or a basement where you’re working from.
We have also seen a few cases where there was electrical noise or something and Marlin drove under power to the Y=0 or X=0 and then back. If you want to tease it out you can run the job with a piece of purple foam. If the driver overheats, then that axis will become disabled. If it is noise, then that axis will actively drive to the end and then return to the right place on the path.
The weird thing about the heat idea is I live in Australia, where we are currently in the depths of winter. Currently our max temperatures are around 16-19 Celcius (61- 66 F).
As you can see in the image it is definitely driving under power, but not to 0,0. In one case it drove in the positive x direction and in another in the negative y direction. It also isn’t just a driver shutting itself down because the router moves faster than it normally does.
I’m starting to think that it must be a noise issue.
Is it possible for interference from the router power cable to feed back through the motor wires?
The only thing I changed about the machine, other than longer runs, is I re-ran my router power cable along the same route as the wires for my z-axis motor. They now run right next to each other. I did see a tiny kick from the router just before the problem arose.
Is it possible that the kick from the router caused a slight spike in the power draw of the router, which in turn induced a current in my motor wiring, which fed back into the MiniRambo and caused one of the other motors to go a bit nuts?
Sorry if this is a stupid question. I’m a physicist by training so the physics makes sense, but my understanding of the circuitry that goes into these things is pretty rudimentary so I don’t really know if that kind of response is feasible.
I guess one thing to try is go back to my old run for the router cable and see if it happens again.
Highly unlikely. EMI causes current and it is pretty small when it gets through all that plastic and air. The motors have a lot of current going between them, so it would take a lot of interference to affect them.
More susceptible are the signals between the LCD and the board or the USB cable. This is the best fit because changing a gcode from G1 X100 to G1 X10 is just one mistake.
Medium risk are the signals from the microcontroller to the drivers, which are really small wires (that’s good) but they are digital signals, with no current, so they can be affected. That’s pretty rare and it doesn’t make sense for it to be never happening, and then happening millions of times at once.
Me too! A long time ago. My BS is in physics, my masters in EE, but I have been working robotics/software engineering since college.
Arcs should be ok. We used to get a bunch of weird issues. They aren’t used often in 3D printing, so the code is error prone. Some of the recent problems we’ve had were related to it taking a really long time to compute arcs, or if you turn them off, then the CAM can turn a tiny arc into a thousand commands and that can end up saturating the serial connection.
How are you sending the gcode? Pi, laptop, or SD? Can you try a different one?
Thanks for all that information. That makes sense. I’ve moved the board to the shelf underneath the machine so that will give it a bit more distance and hopefully help with interference. Also I’ve enclosed it to keep dust away just in case.
How are you sending the gcode? Pi, laptop, or SD? Can you try a different one?
I’m sending via SD card through the LCD screen. I could try borrowing my wife’s laptop, unfortunately mine is a work one and locked down so I couldn’t install repetier on it. It it possible to use an Android device to run it? I have a banged up old android tablet with USB ports that would be perfect.
There is a gcode sender on android. I haven’t used it personally. You would need the proper cable. USB OTG, unless your android has full sized USB host connectors on it.
Can you check your gcode for G2 or G3 commands? The fact that there is a perfect circle drawn just before the tool moves straight off is curious to me. If marlin is choking on the arc move somehow and the movement planner goes nuts that could be one explanation.
Yeah I’ve had a look at the Gcode and yes there are G2 and G3 commands. However there are several of them a fair way before that particular cut that killed it, so I don’t think the G2 and G3 thing is my problem.
I’ve revived an old Android tablet and confirmed that it connects and can control the router. Now I just need to create a Gcode file and give it a go. I’ll post back when I do and we’ll find out if that was my issue.
The tablet will probably be a more elegant solution long term anyway. It has a web interface so I can send the Gcode files to it wirelessly instead of by SD card, and I can use the camera of the tablet for monitoring from inside the house.
Thanks for this, I’ll also give those steps a go. Maybe I need to be in the habit of slow formatting my SD cards more often, that SD card did jump around a bit so that could definitely be an issue.

{kind=link}