It could very well be a bad board. Ryan noted he’s reading back through the thread, so I expect you’ll hear more from him shortly. Ryan has always made a solid effort to support his product and I’m sure this will be no different.
We’ve repeatedly have users with self-proclaimed “obviously bad boards” that , when swapped arrived back to Ryan in perfect working order. Further troubleshooting then revealed other issues like those that we’ve walked through up above. That’s part of why we try really hard to be thorough in troubleshooting.
Ryan tests every board he ships, but not every test can catch every weird edge case like having drivers that init and then for whatever reason don’t end up moving a motor.
If you read through this thread, it starts with you buying someone else’ oddball build, then is filled with examples of missteps and confusion, asking how to do some pretty fundamental things, and all the while asserting that things are obviously the way you think they are.
We get it, we all start somewhere and the learning curve with these machine can be very steep even when we start with a fresh box of new parts. It can be incredibly frustrating.
That doesn’t support us automatically jumping to the conclusion that the Jackpot has to be bad especially with the history I describe above. (again, your board very well could be heading for replacement.)
I hear you, really I do. Forums are terrible at conveying tone, but I’m getting a large sense of frustration and a pretty healthy dose of snark.
The only one here that can make the board call is @vicious1 , the rest of us are just here trying to provide the best community support possible. We try to help keep the prices of Ryan’s parts and kits low so that fellow makers can go build these awesome machines. I’ll bet Ryan wants to finish that last bit of troubleshooting and may even spot something the rest of us missed along the way. Stand by for that.
It sucks that you bought someone else’ unicorn, but that’s reality.
It double sucks that you -may- have a bad Jackpot; which it looks pretty likely at this point.
But, we really do need to follow through with the last of the troubleshooting steps.
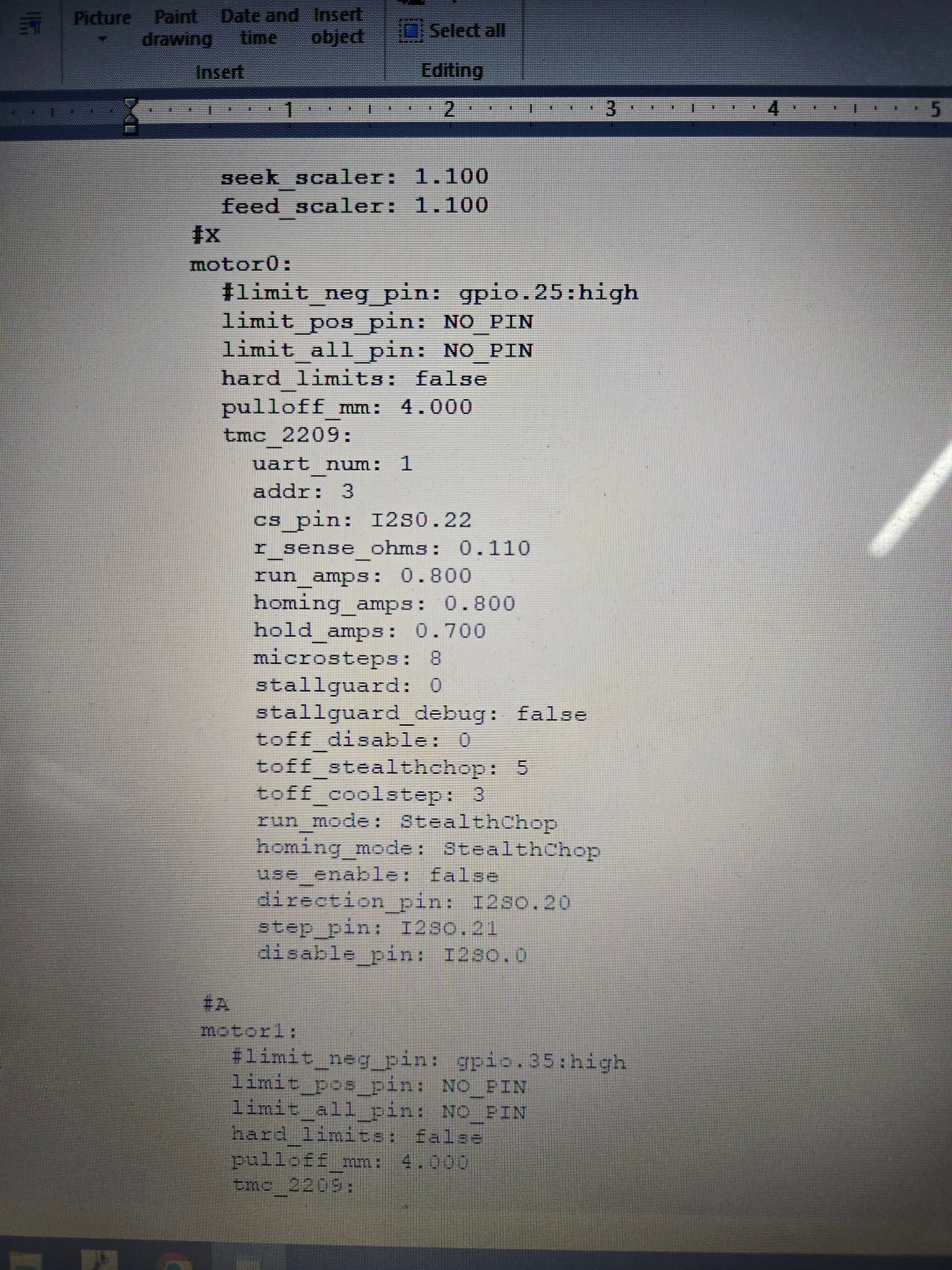
Hmm, lack of daily Windows use here.
It used to be that Notepad would mangle things but WordPad would not. Perhaps that’s flipped now.
VSCode is a good option, I also used to use Notepad++ back in the day.