I have not left yet, I won’t be gone long, and I can still reply but I will not be in the shop with the electronics hooked up and running in front of me.
You are doing it again. We are experts in this board, we designed and built it. Why do you want to suffer and do this by yourself. Why not just share the details and we can help. What are the two problems?
120 messages in, you made a breakthrough of some sort and didn’t share what the issue has been thus far…that isn’t fair. If someone else is in your shoes we will not know how to help them.
If you can’t tell I am dying to help you, I just feel like I am yelling over a wall making guesses and you are on the other side having all the fun and not telling us anything.
Did you change it to “FluidNC” as I showed in the previous screenshot? I will not help you in anything other than UGS or the built in sender at this point.
$ss
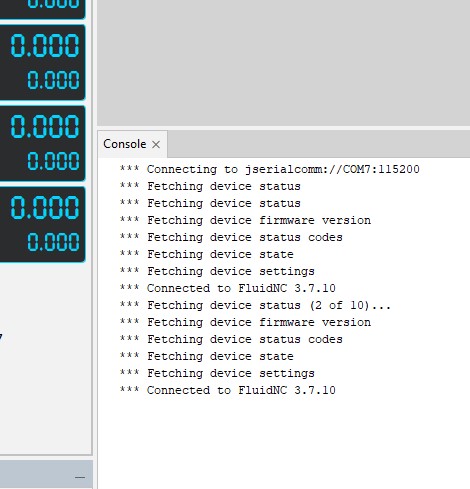
[MSG:INFO: FluidNC 3.7.10 GitHub - bdring/FluidNC: The next generation of motion control firmware]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.4]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config.yaml]
[MSG:INFO: Axes: using defaults]
[MSG:INFO: Machine Dan1]
[MSG:INFO: Board None]
[MSG:INFO: Stepping:RMT Pulse:4us Dsbl Delay:0us Dir Delay:0us Idle Delay:255ms]
[MSG:INFO: Axis count 3]
[MSG:INFO: Axis X (-1000.000,0.000)]
[MSG:INFO: Motor0]
[MSG:INFO: Axis Y (-1000.000,0.000)]
[MSG:INFO: Motor0]
[MSG:INFO: Axis Z (-1000.000,0.000)]
[MSG:INFO: Motor0]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: Using spindle NoSpindle]
[MSG:INFO: STA SSID is not set]
[MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1]
[MSG:INFO: AP started]
[MSG:INFO: WiFi on]
[MSG:INFO: Captive Portal Started]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
ok
That is a problem. If I don’t connect USB I never see Fluid NC on WIFI connection screen. When I connect to FLUIDNC it automatically disconnects from my WIFI.