A bit of background leading to my purchase of the V1 board.
Have had the board and drivers from V1 for maybe 3-5 weeks. I am retired and spend 98% of my time with my various CNC machines. My Sherline controller box died and although I do like some of the added functions in LinuxCNC I thought that I would change over to Windows. I have the Sherline 2000CNC mill with CNC Rotary. Also have Sherline CNC long bed lathe. I have the lathe running on a simple Uno and Shield with 8825s and have no problems. Also connected Mill (3Axes only) with same config.
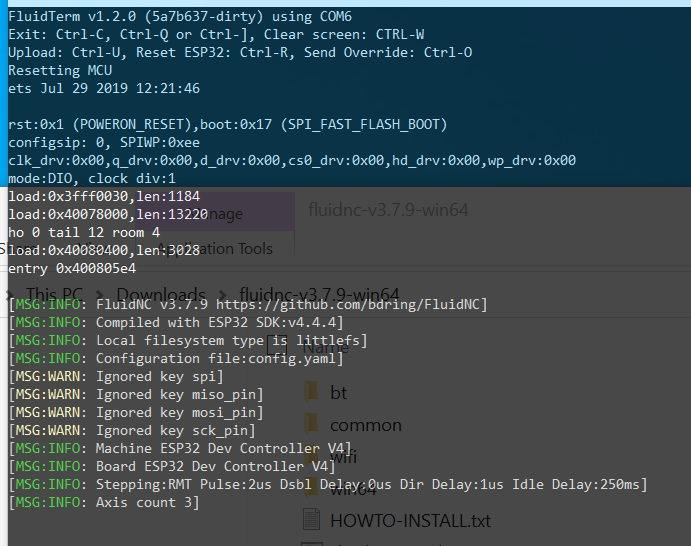
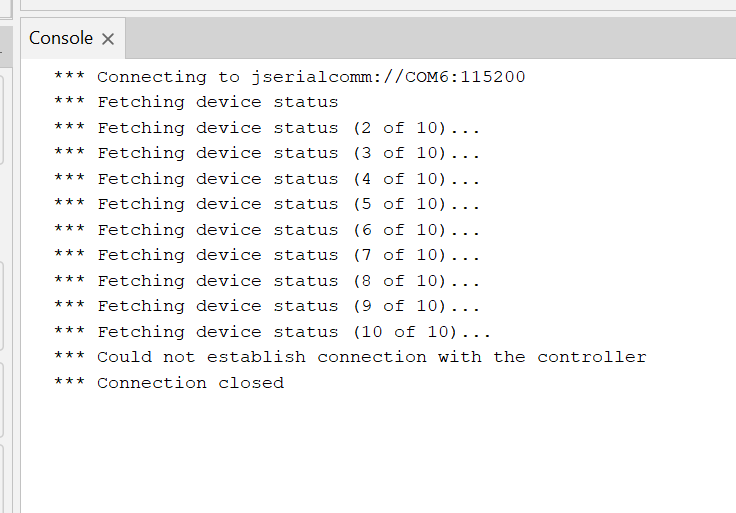
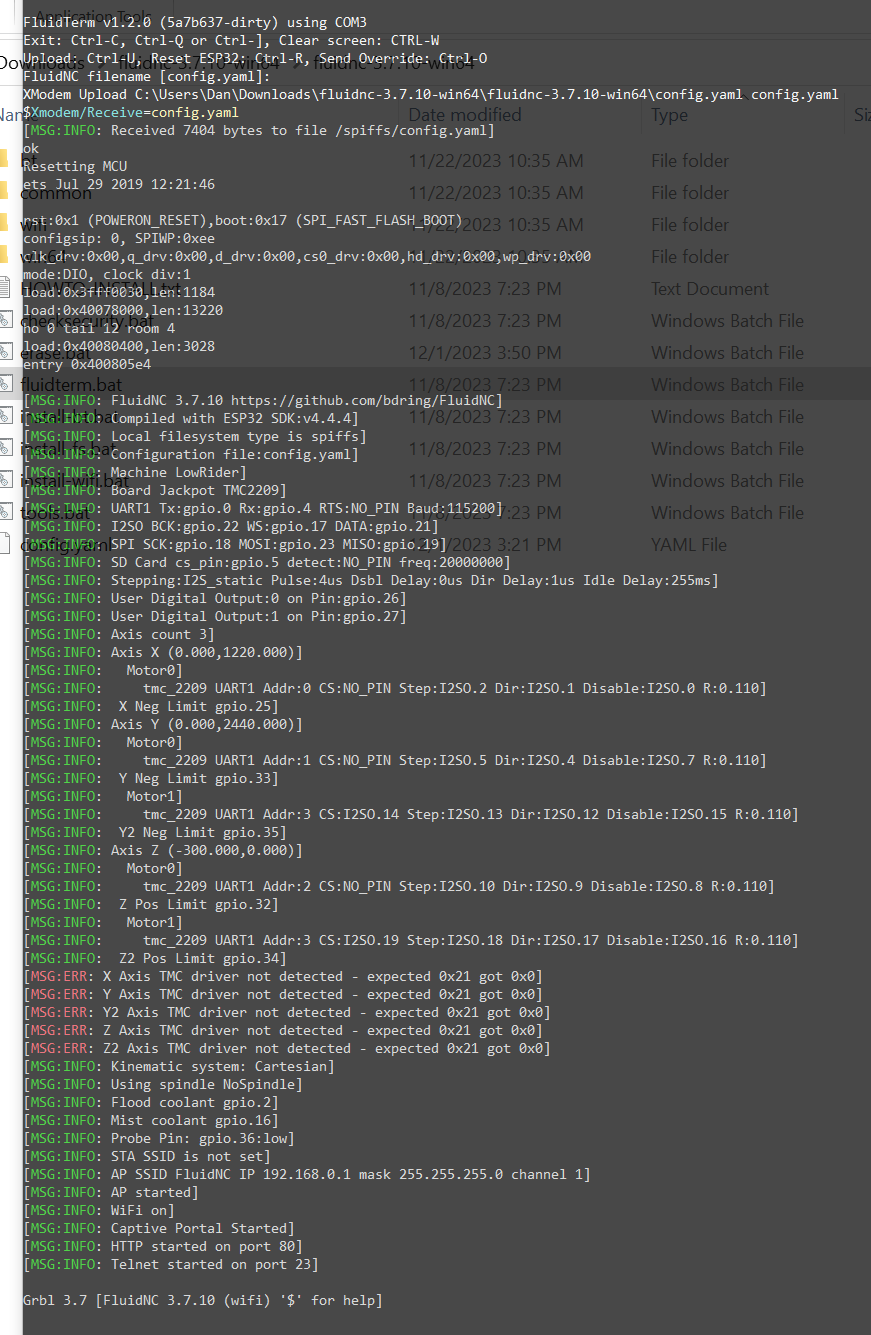
If I understand the instuctions for the Jackpot, the loading of the firmware is fairly straightforward. The board will load firmware and sometimes show correct movements on the DRO screen of my sender. I use several different ones. At other times it will not load the firmware at all. I have tried loading at least 6 or 8 of the sample config files and have no luck with movement and same problems with loading the UGS or Lightburn software. GRBL Panel is not compatible with ESP32 at this point.
If someone could take a look at the enclosed screen shots and maybe head me in the right direction.
What I want is very simple in my mind - a working 4 axis board to move X Y Z A. No limits, no probe, nothing extra. At this point I do not understand the workings of the 2209 drivers that came with it. I would just as soon have simple 8825 drivers. They do fine on my CO2, diode lasers, engravers, micro mill and 3d printers.
My machines run on a variety of Dell Desktops and Laptops, and a Toshiba for the cnc router. All have I3, I5 or I7 chips also 8 or 16 gig memory. I am trying to give as much info as possible. If more is needed I will certainly be happy to furnish it. BTW I am 76 years old and got my first PC in 1978.
Hope I have done my first post on this forum correctly. If not I am sure I will be schooled.
Could you please direct me to your config. All I know about are the sample configs. Also I have tried using .8 .9 and .10. Same with all. Thank you. Will reload .10 and try your config.
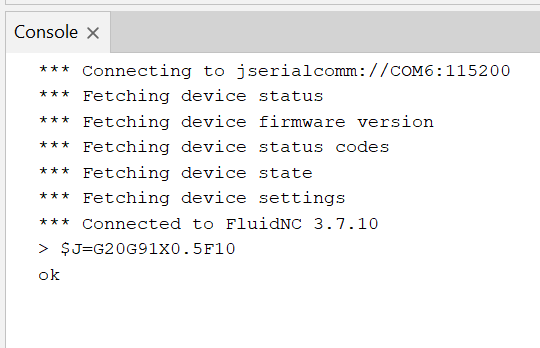
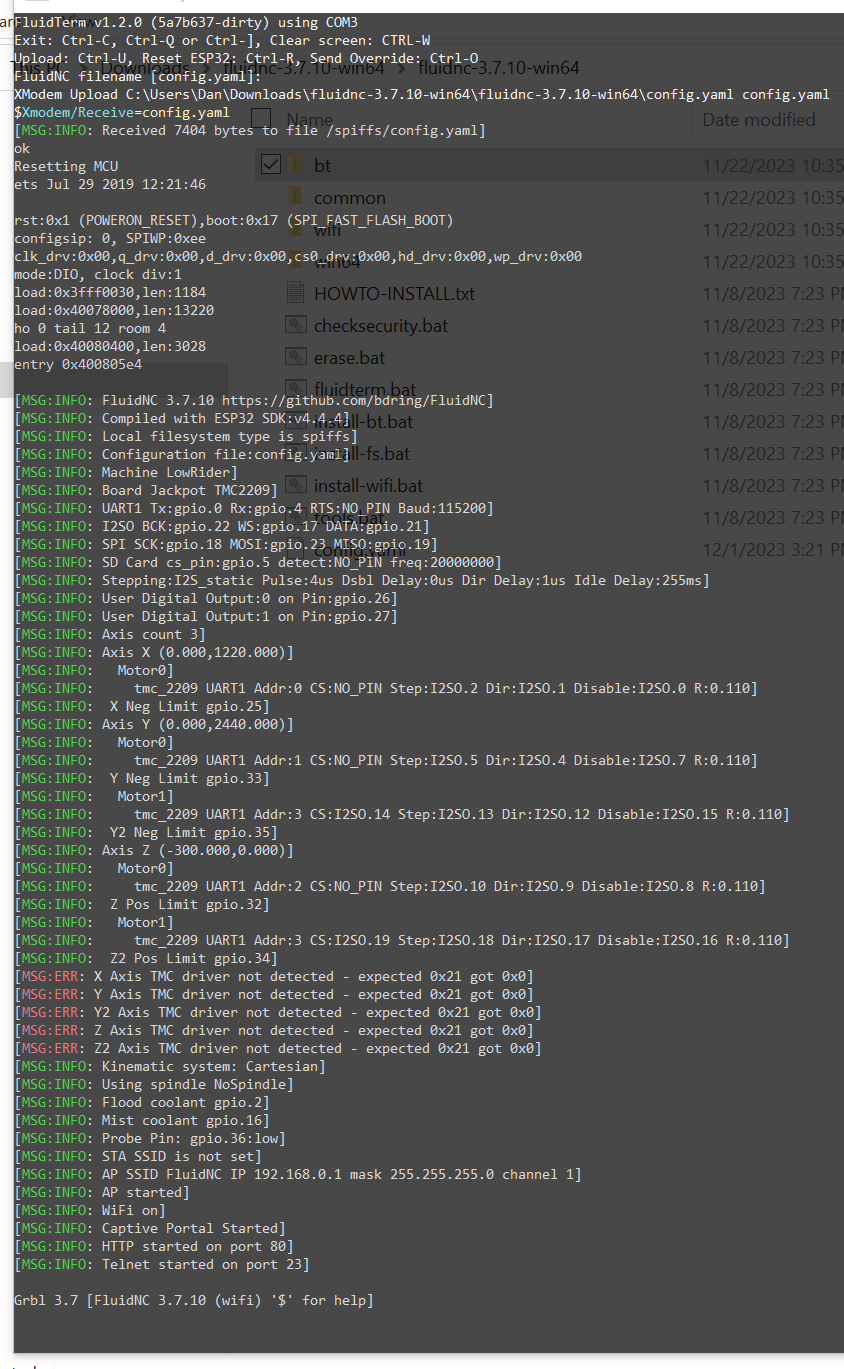
Found a config file on Github V1 site. Loaded and it works. Only have one stepper connected at present. Thank you for the info. Should have come here and inquired 3 or 4 weeks ago. Now I can go to browser and delete many bookmarks pertaining to the Jackpot board. I have searched everywhere but managed to miss the fact that there were configs elsewhere besides the ones in the release files.
And the uneducated manage to move one more step forward. Thanks again.
Okay, thanks. The fluidNC wiki directs users to our github configs, I will see if they can add something to the fluid firmware links, or at least reference the wiki directory.
I have switched my board to a Jackpot also and want to use it for an XYZA too. I have a rotary on the A axis. I was wondering if you are using a rotary also?
Also USB connector and small square chip in front of it will burn you within the time it takes to touch them and jerk you finger off. INSTANTLY.
I give up. Thanks for the help. I’ll just have to use an UNO and shield. Disconnect Y and plug it to A. What I am doing does not require Y. This is the sneaker way to operate.
Anyone who would like to have this board for postage prepaid is welcome to it.
We can get you there, you do not need to work alone. Just share what you have done. I can help. I do not have a rotary axis though, so you will need to test.
All I have is a motor attached to X. Board is not installed in any piece of equipment. Said motor works with CNC shield and 8825 driver. It also worked with this for a short time.
Am reinstalling with the same YAML file from the V1 site. This will be the third reinstall of this file.
I tried uploading my config.yaml that works with my rotary. It won’t let me select the file.
I copied and pasted it, but the formatting is wrong. The spacing is not correct.
I’m not sure how to send it.