Hello, Dan. I"m obviously not Ryan, but have been following this thread as I often try to help (I’m just a customer and community member.)
I’ve tried to follow along but must admit it’s been difficult for me to keep up with the.troubleshooting.
I couldn’t quite figure out why this thread had me scratching my head.
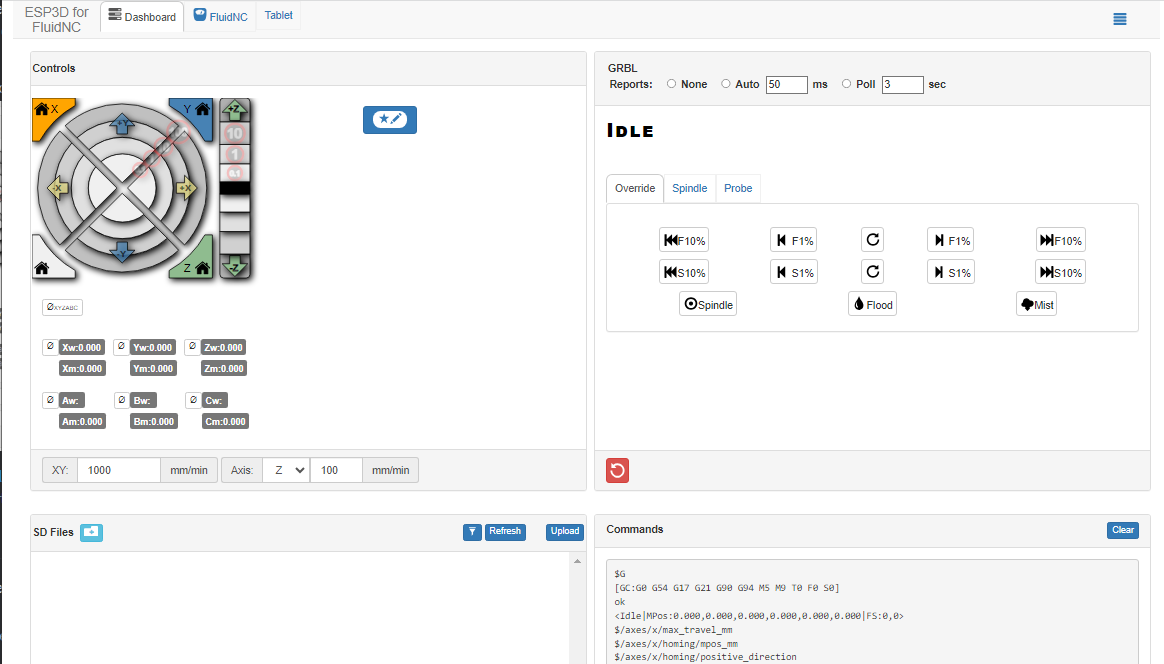
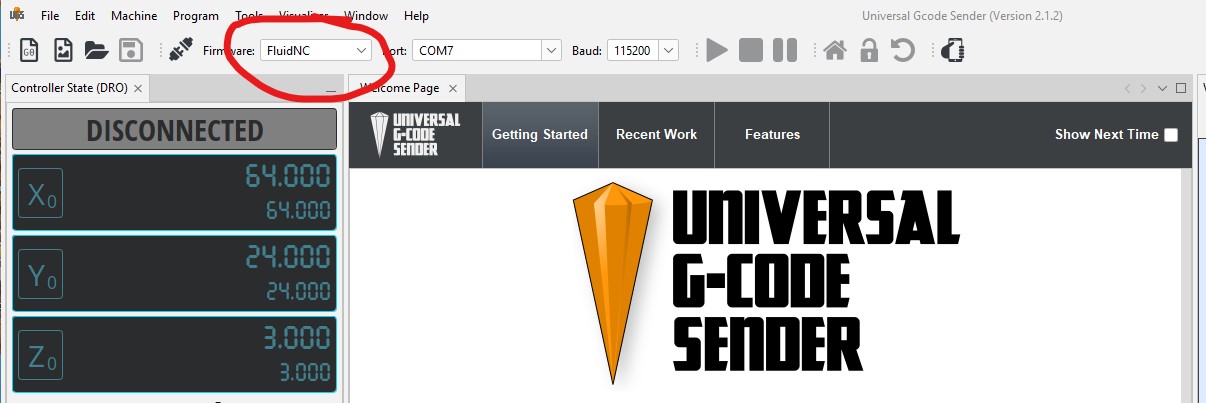
This helps me understand what your setup is, and also how that relates to this:
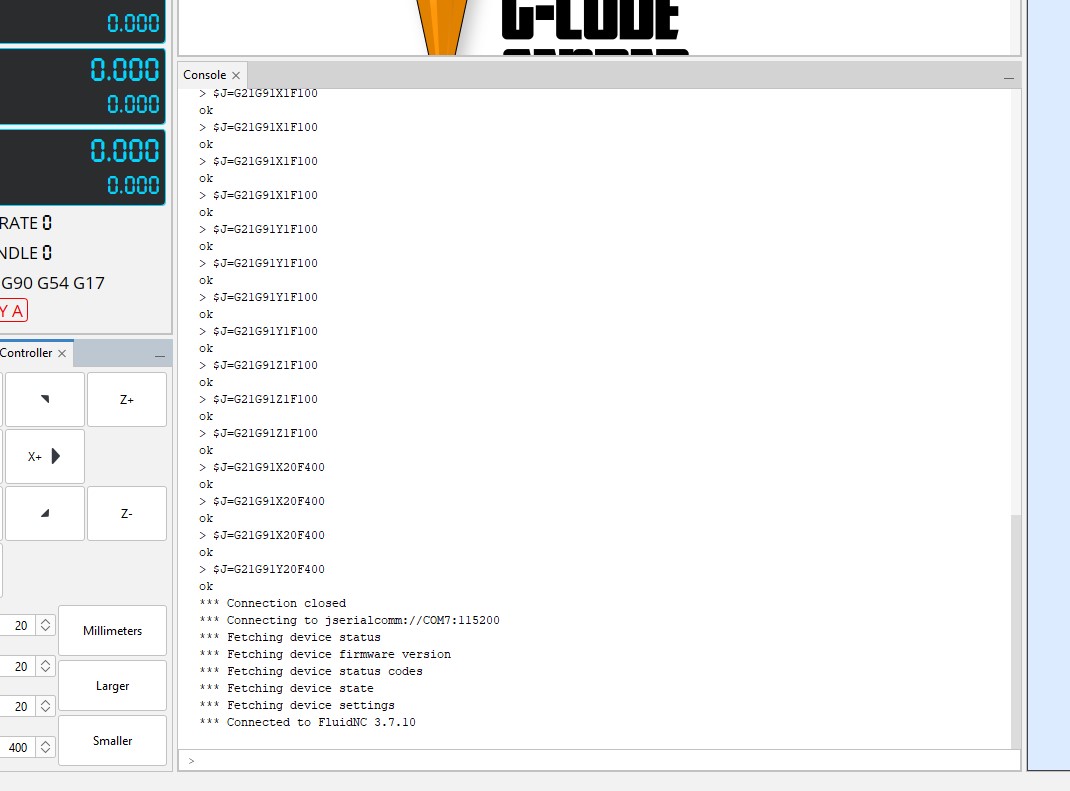
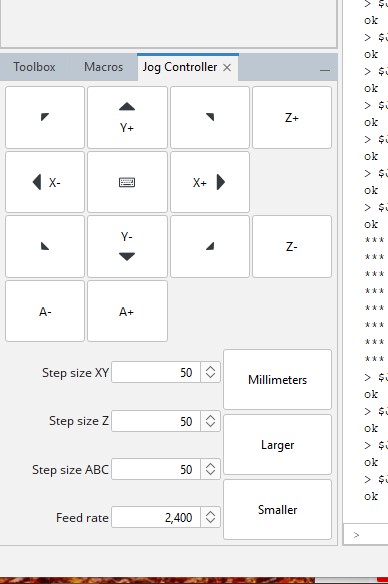
UGS appears to be your preferred sender, and I certainly understand not wanting to change from software that works for you on your other machines. But, there seems to be an interaction that UGS has with FluidNC that is causing corruption or erasure of the FluidNC ESP32s or thier configs. Since FluidNC/ESP32 controllers use USB bridge ICs for both managing gcode sending and also for programming and config file upload, it isn’t completely surprising that there are issues.
I suspect at some point UGS may get a fix once this is understood, as it is a new controller type that UGS hasn’t previously supported fully.
Other software has had to sort this out as well. For example, Lightburn had to add an option to manage the DTR signal because while that signal is needed for some other USB connected board types to work properly , others like the FluidNC controllers don’t work properly with that same signal asserted.
This isn’t a defect in the Jackpot in my opinion, it’s an incompatibility with UGS.
It’s likely that Ryan or others like myself could re-flash your jackpot/ESP32 and get it running happily with other senders, and then all of this would repeat if that board gets connected up to UGS again.
It may be that in the future if a fix is developed to allow UGS not to have this bad interaction with ESP32 FluidNC controllers that this setup would be workable for you, even if the networking and UI of FluidNC doesn’t suit your use case.
I’ll bet that Ryan and the rest of the community here will keep trying to look for a way to address this since it is now understood that UGS has this incompatibility with FluidNC.
Since it appears that UGS needs to handle these board types properly, theres not much the community can do until that happens.
Whichever way this turns out, I hope you’re able to get your Sherline working correctly. I had a Sherline mini mill for a while, until the controller box died- just as you have experienced. That one had the DRO option and encoders on the steppers. It was a great little mill, and I was just starting to learn how to use it fully when it died.
I ended up giving that machine to a kid at the local makerspace who had the energy and time to try and make it work.
If at some point the issue with UGS gets sorted, then at that time it may be worth trying a fresh flash of the Jackpot.
Thanks for offering to return the board for analysis. It’s a nice gesture to try and allow the community to sort out what has gone wrong with whatever UGS is doing when connecting. In the future that might help other users trying to make similar setups work.