Ok, well a very roundabout way to get here, but here I am.
Edit: Even more roundabout the HBot wasn’t quite stable enough, so I’m back to CoreXY
Originally, this was supposed to be a coreXY printer project. Then I got tangled in the staggering number of options, and the project stalled. And again. And again.
Then I got the laser, and intended to put it on a LowRider2. Seemed like a good fit.
Then I came across a cantilevered coreXY laser on thingiverse which happened to use a large number of parts I already owned, and practically nothing I didn’t, save the 3D printed parts… so I got printing. Unfortunately, the prints had huge overhangs and super finicky tolerances, and needed a lot of editing, or supports, which my printer is bad at, and I am too. Sadly, I put that aside.
Then I came across a cantilevered HBot design. Looked good, but wobbly. I could see it having stability issues, and it was difficult to adapt for the stability I wanted. The trade-off was that it was able to get the laser close to a wall, which is nice. If I need that, maybe I’ll get back to those designs.
The Hbot design is more straightforward than coreXY, with similar characteristics. Both motors turning for X or Y movement. Same direction moves in X, opposite moves in Y.
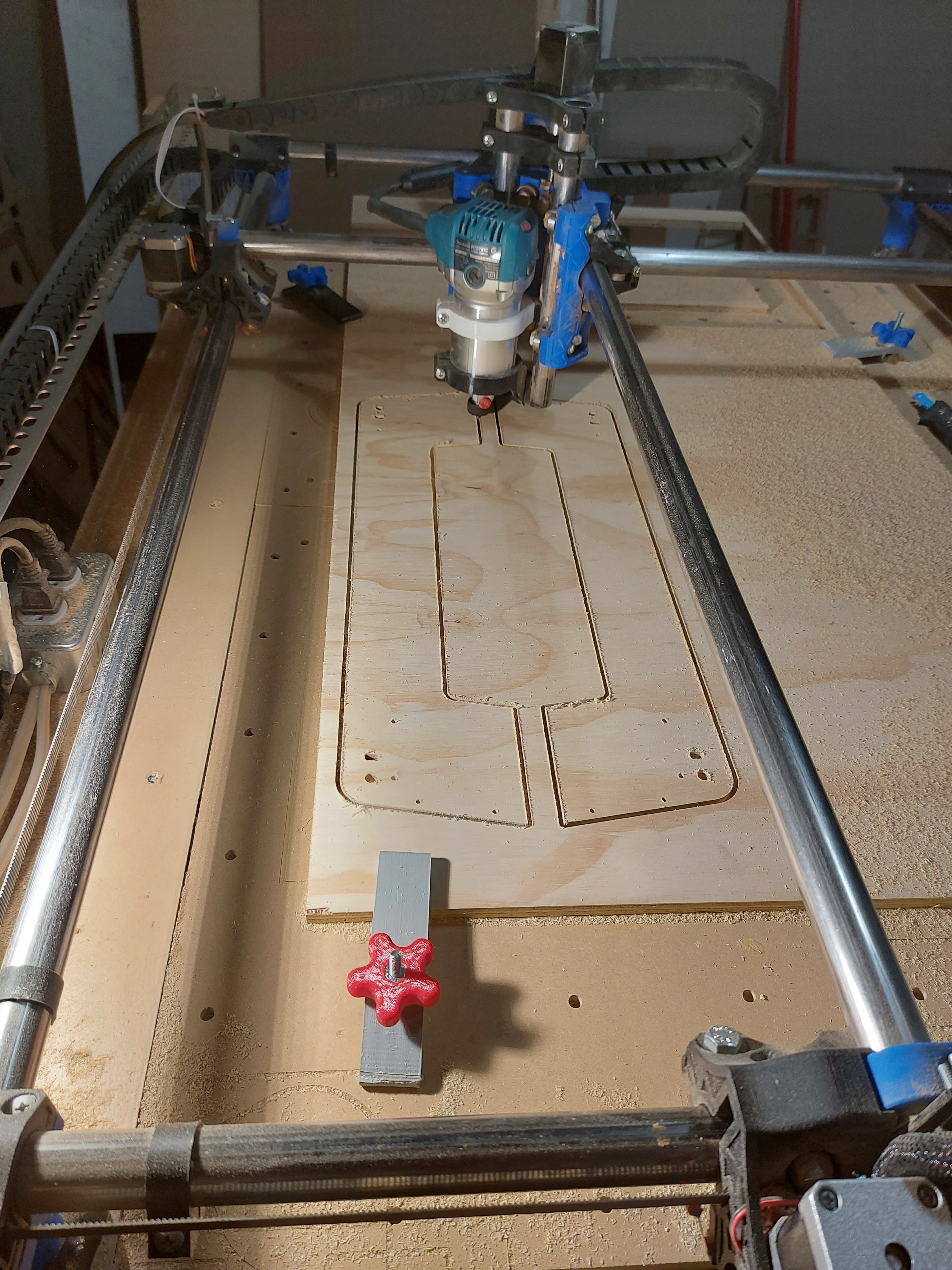
The legs are really the only MPCNC thing. The rest was 3D printed. Kind of cheating for the gallery, but I’d have had trouble without the CNC.
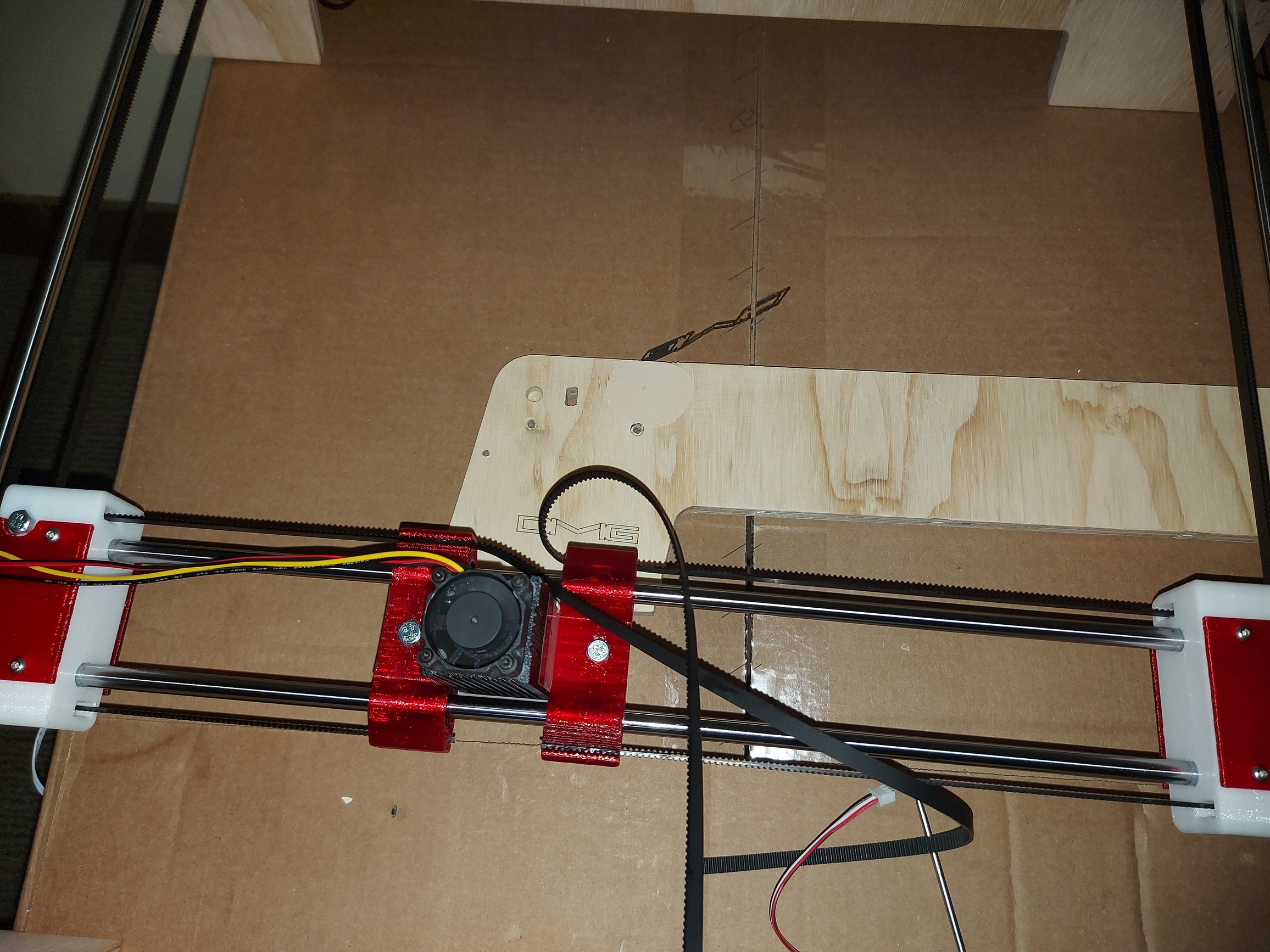
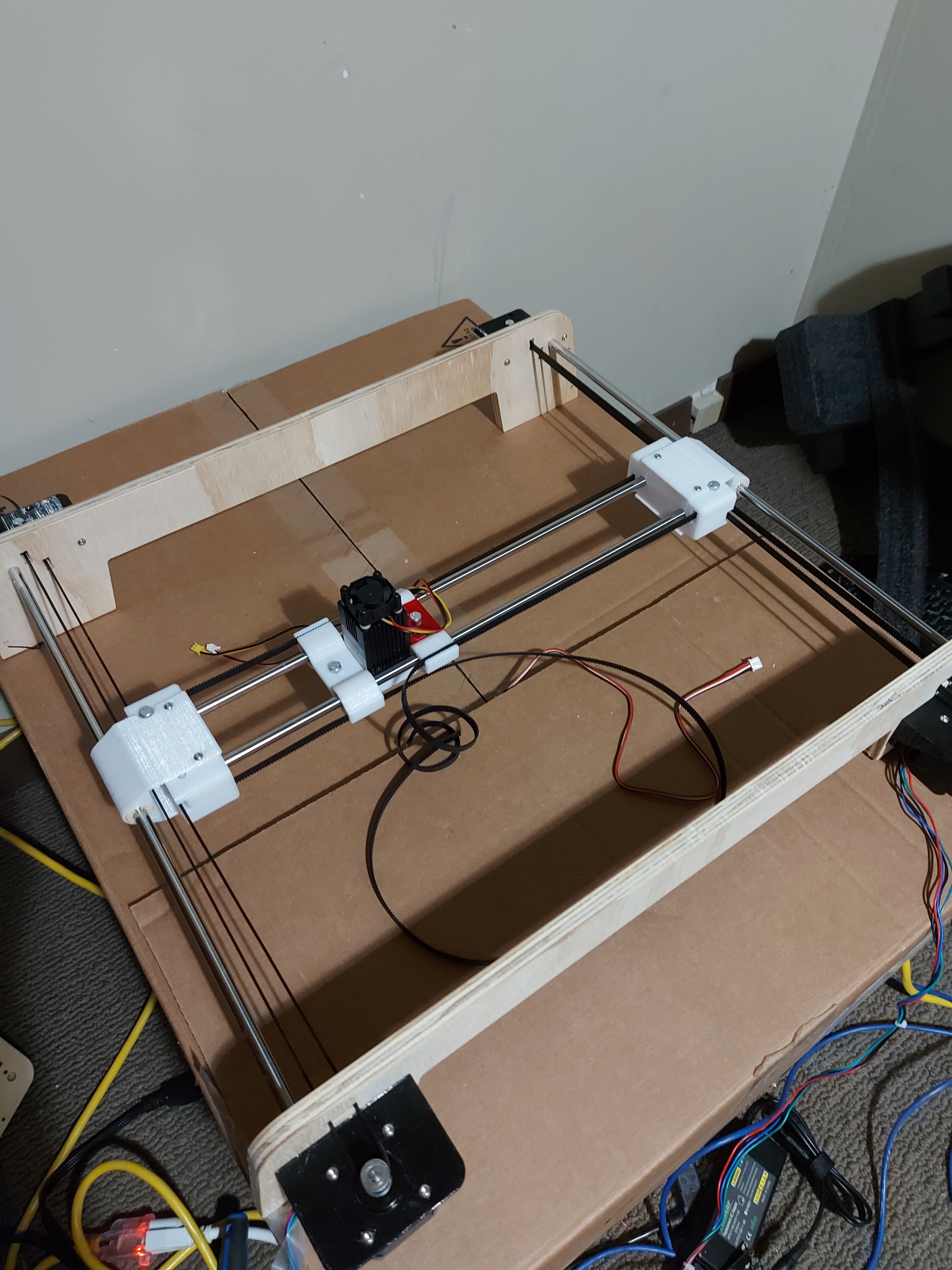
Test fit the rods and center shuttle. Motor mounts and corner blocks in place.
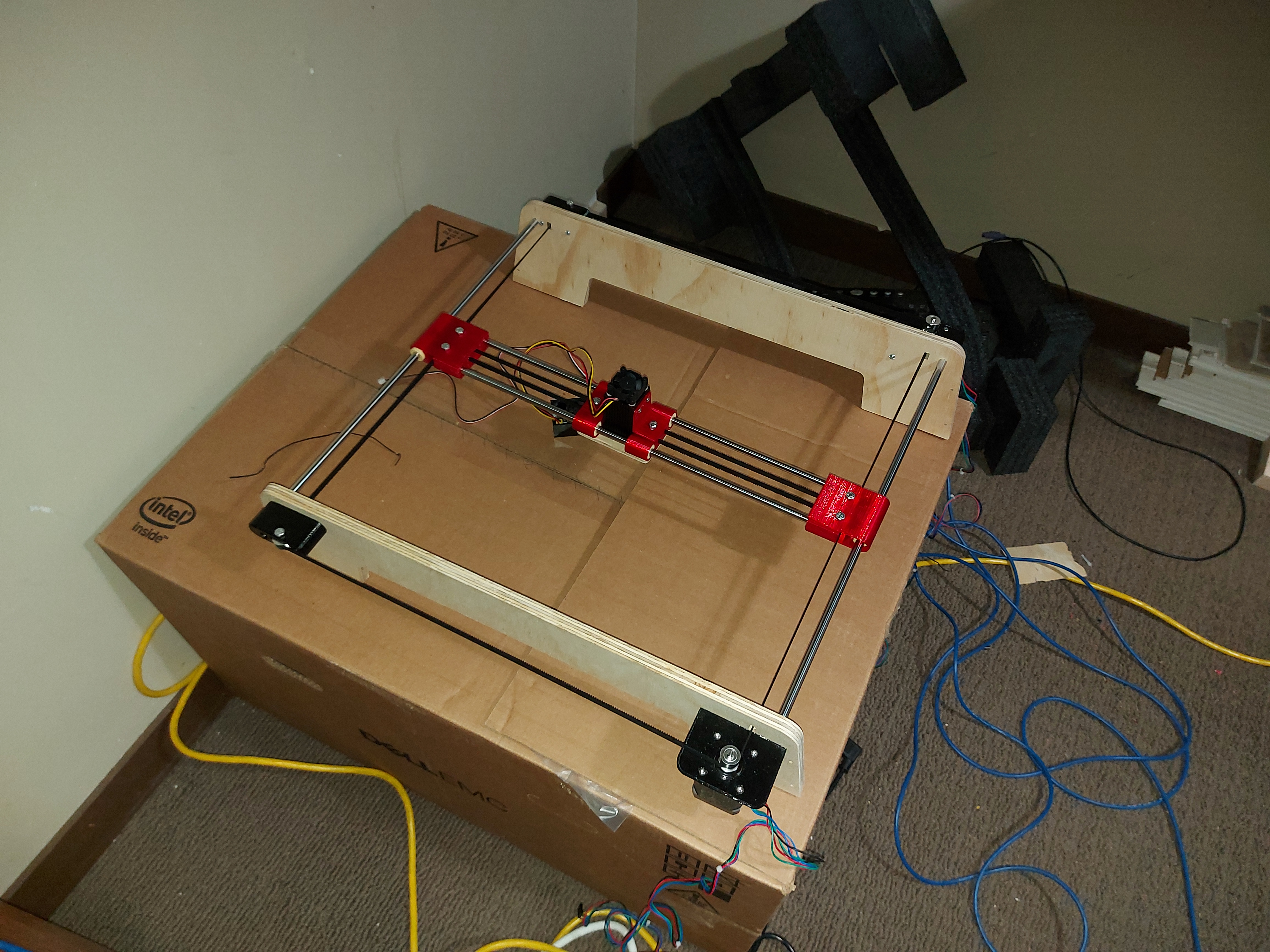
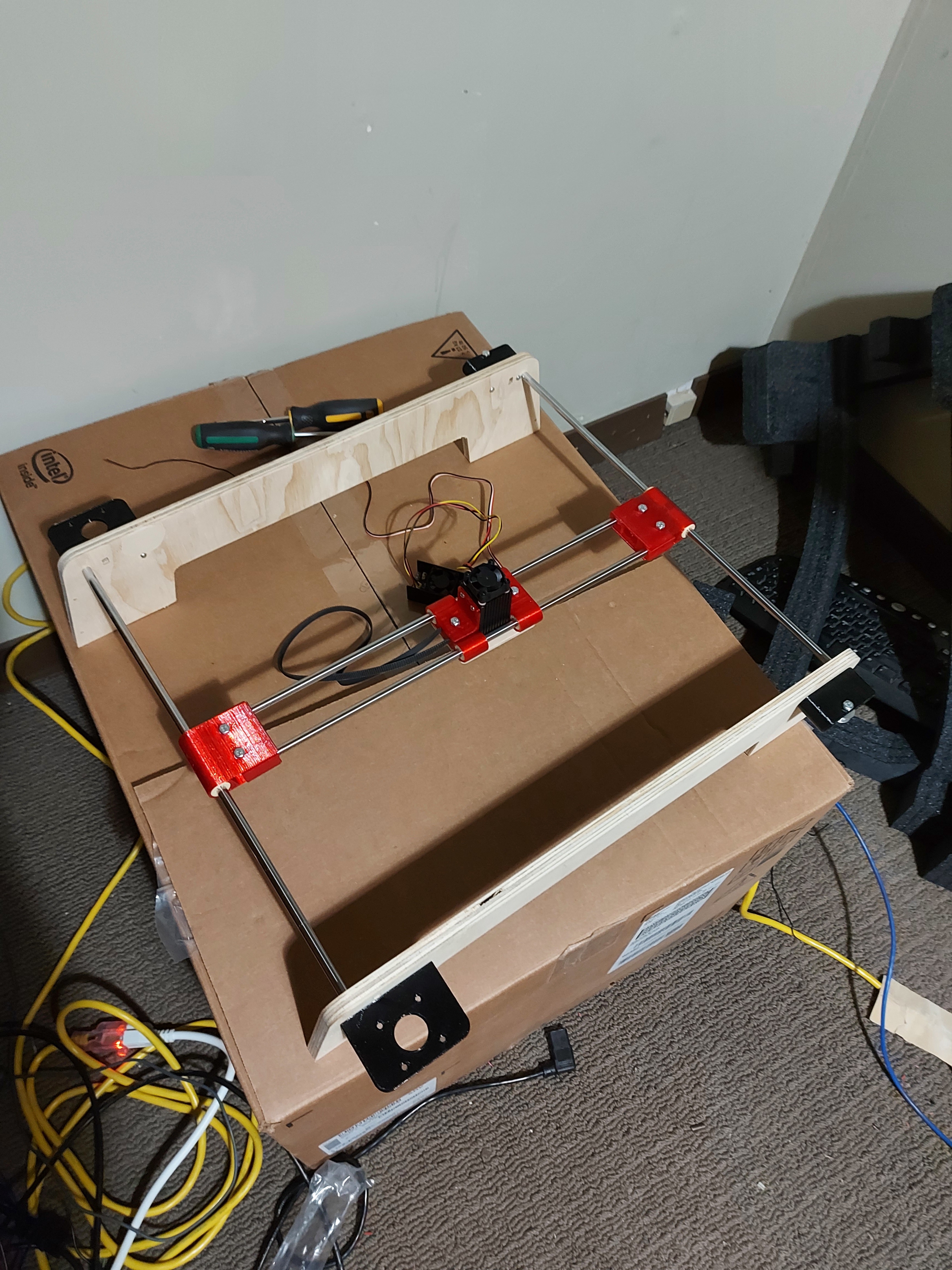
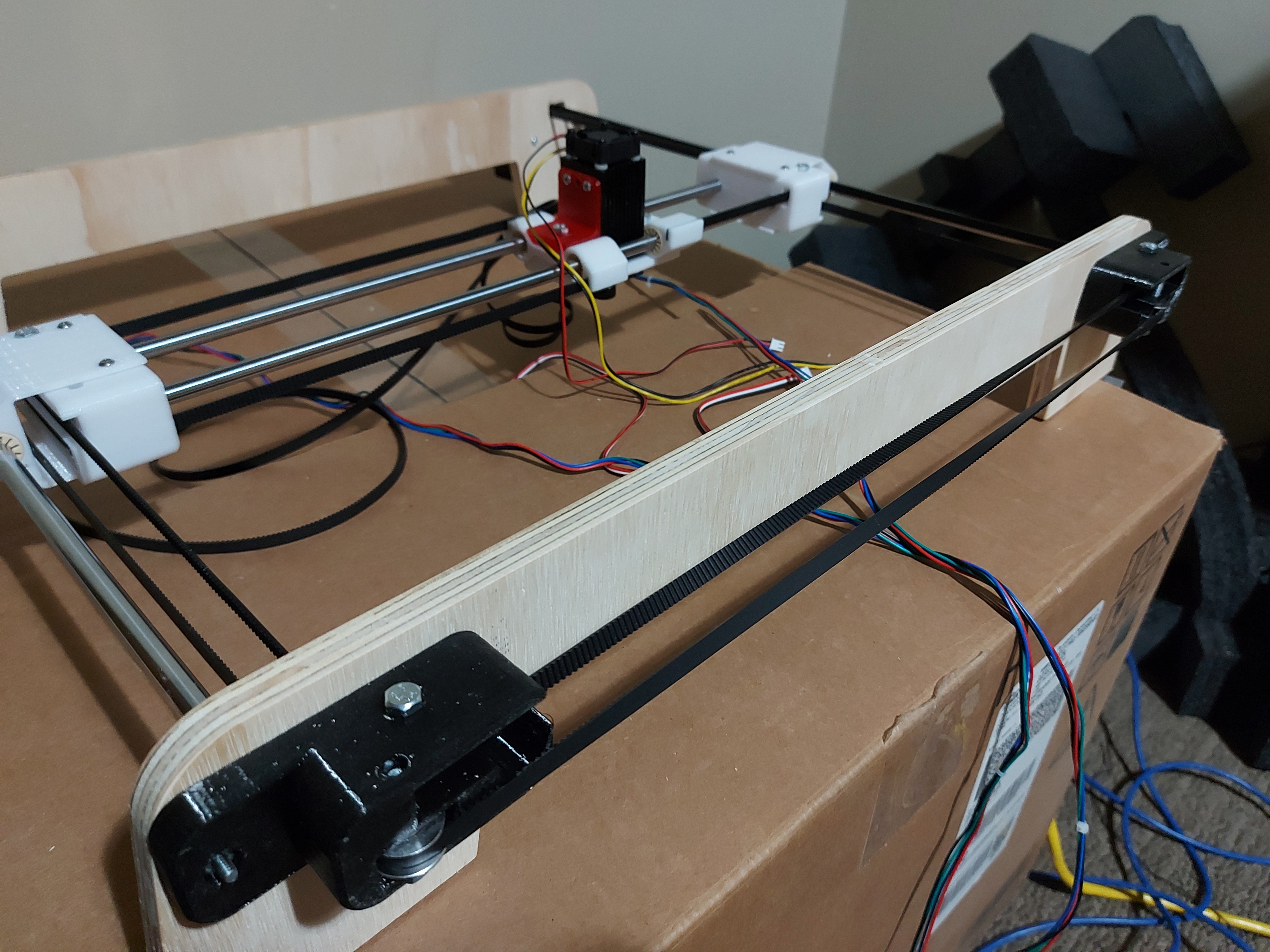
More or less mechanically complete. The belt runs seem good. Oh, there’s a CNC cut wood plate as the base for the center shuttle. That could have been 3D printed, I suppose.
The legs need cross supports, which I will add soon, they’ll be simple plywood rectangles, nothing too fancy, I think.
BOM:
- 3D printed parts
- 2X 8mm rods, 400mm length
- 2X 8mm rods 450mm length
- 8X LM8UU linear bearings
- 2X NEMA 17 motors
- 2X 20T GT2 timing pulleys (6mm belt)
- 1X 20T smooth idler pulley
- 6X 20T toothed idler pulley
- 8X 3mmX8mm screws
- 8X 5mmX30mm screws
- 8X 5mm nylock nuts
- 8X #6-32 screws, 1"
- 8X #6-32 nylock nuts
- 1X 33-35mm square LED laser
- 1X control board, your choice.
Endstops are still to come, haven’t decided on stuff. Might try sensorless homing, the Bart Dring ESP32 laser/pen controller says it supports it.
Oh, I assembled with Drylin LM8UU bushings, but they’re super draggy. Might try a little lube, but I think I’ll need to sub in regular bearings. These are just too much resistance.

 look at the pieces, and they just did not line up. No good to swap sides either.
look at the pieces, and they just did not line up. No good to swap sides either.