I have run into a problem and would love some help finding a solution. Thanks in advance.
I recently completed the assembly of my LR4 running of a Jackpot 3 (3.9.9). I still have temp struts and need to clean up some wiring but I had it cutting. Yea!

The cuts at the bottom of the board went just fine. Then I sent a few more cuts and started running into issues. I drilled two holes (technically one was drilled and the other was a bore operation.
I ran the jobs from Millmage. They worked great with only one disconnect but I overcame that. When it started having path issues I switched to FluidNC web interface and did some commands to move the machine around in different directions, home on each axis, etc.
When the paths started messing up the LR4 started making sounds like it was not connecting with the belt on the X motor. I reset the machine (typically by unplugging and replugging in the power) and tried to move it again.
It moves great in Z and Y. Moving it in X either seems like it had belt traction issues or it acts like it is stuck (e.g., moves a bit and then stops moving, stops making sounds and will not initiate another move without resetting the machine).
During one of these attempts I grabbed the x-belt, making it slightly tighter, and the machine moved on the gantry a little bit. So, I attempted to adjust the belt tension to see if that would solve the problem.
I started very loose and got a lot of spinning out. I eventually got to a point it seemed to like but then it started acting like it was struggling to overcome the resistance of the gantry so I loosened the top compression slots on the core. This didn’t seem to change the situation.
Now, if the LR4 is without power, the Y axis can be moved pretty easily by hand but the X seems to have resistance and sliding it back and forth (left to right, right to left) results in some clicking sounds, almost like it encounters some roughness on the gantry conduit. I checked to see if there was rough areas on the conduit, left over adhesive from a price tag, or catching on some wiring, but none of this seems to be the case.
When it runs, for the short time it does, I can see the motor belt pulley moving. I thought the pulley might have gotten loose on the shaft of the motor but I don’t think that is happening and I checked that the set screws are tight.
The pulley is slightly misaligned with the belt but, because I can’t see the top of the pulley, I am not certain the belt isn’t still making contact with the teeth. The pulley definitely spins along the length of the belt when moved by hand.
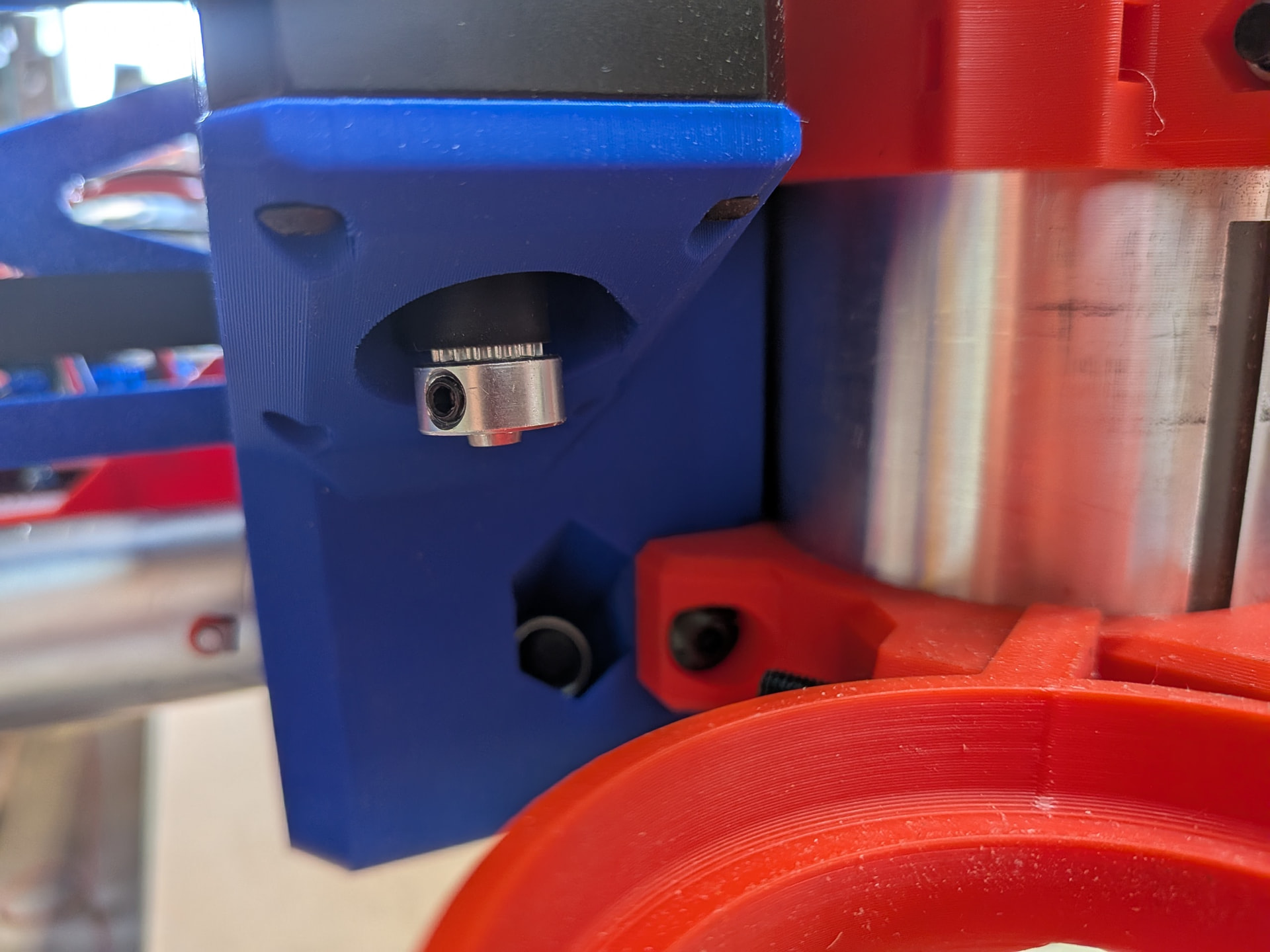
I am suspecting that I have a bad stepper motor. I have resisted pulling the core and rebuilding it but I will do that if it is suggested here.
Let me know if there is additional information you need and/or any suggestions for diagnostics or solutions you might have. Thanks.
Here is my stepper motor -

