OK… well, I built mine, and it seems all good except I cannot get the 3Dconnexion software to recognize the new device.
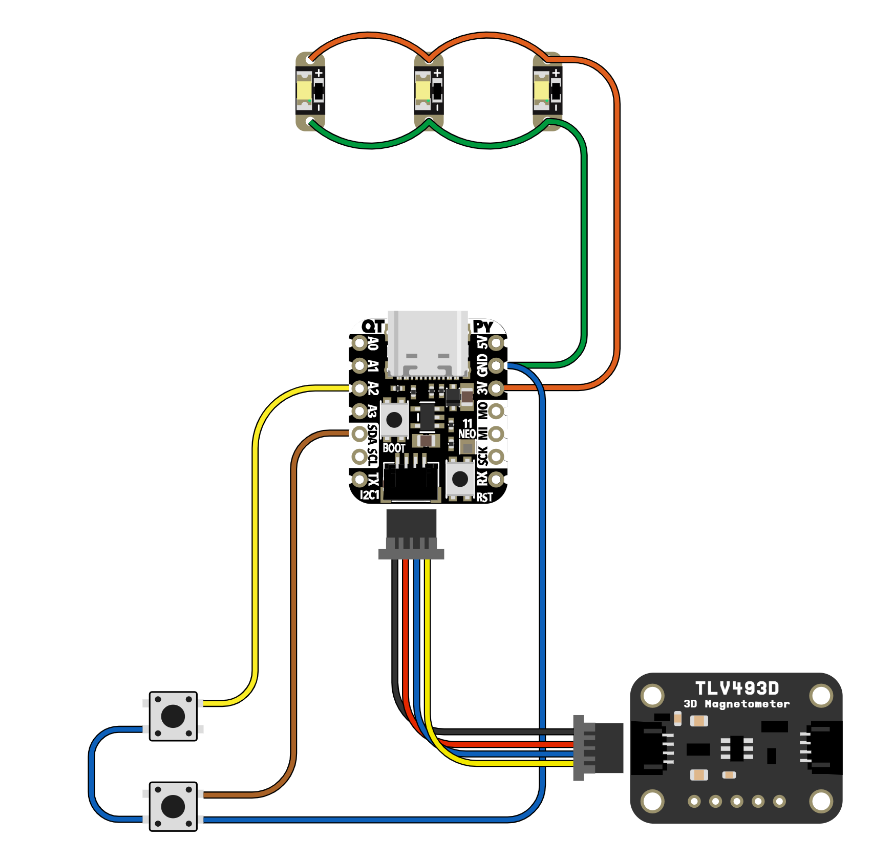
All my soldering seems good, and all my wiring seems good. All debug modes show it working fine in the Arduino IDE. I renamed the device to “Spacemouse” in the boards.txt, and edited the vid= value and pid= value as shown.
The device seems to be perceived by my MacOS as simply being a mouse. I can move the mouse cursor on my MacBook Pro screen… up, down, left, right, etc.
Pushing down on the stem, or pulling up on it, gets “transform” type values as expected in the debug modes.
At this point a most important step, getting it recognized by the 3Dconnexion software, is holding me up.
Some other tips for MacOS users:
The instruction in the video for Windows users … to copy an “AVR” folder into the sketch folder, and then go into it, and replace the contents of “boards.txt” is not the same on a Mac.
For boards.txt — on MacOS — how to edit Boards.txt was explained here (note the parts bolded by me): 'boards.txt' equivalent on mac? - #6 by bigrobintx - IDE 1.x - Arduino Forum
“resurrecting an ancient post, this is all i could find, and I have a bit different case. I’m using Sandeep Mistry’s Arduino Core for the Nordic nRF52xxx boards and as it is a downloaded package through the boards manager, and it uses a different processor core, compiler, and debugger (fun times!) there’s a bit more. After some digging I found the packages folder in the Library folder (open finder, click go, hold down option key and Library appears…) then in the Arduino15 folder you’ll see packages and staging… staging is like the downloads from libraries and board managers, tools, etc, packages is the live stuff… dig through there and in my case I found the boards.txt and variants folders as well as the json definitions of the package itself. Pretty slick. I’m using Kris Winer’s dev board and his board isn’t part of Sandeep’s package though I intend to submit it to him for inclusion. Hope this helps someone in the future.”
So, because I was editing the main boards.txt instead of a secondary one in a distinct sketch folder, instead replacing all the contents, I chose to merely add the new board details to the file, formatted like the others. This means that in the Arduino IDE app, I got a board choice of “Spacemouse” in my regular list of boards, not in a distinctly “in my sketch” location.
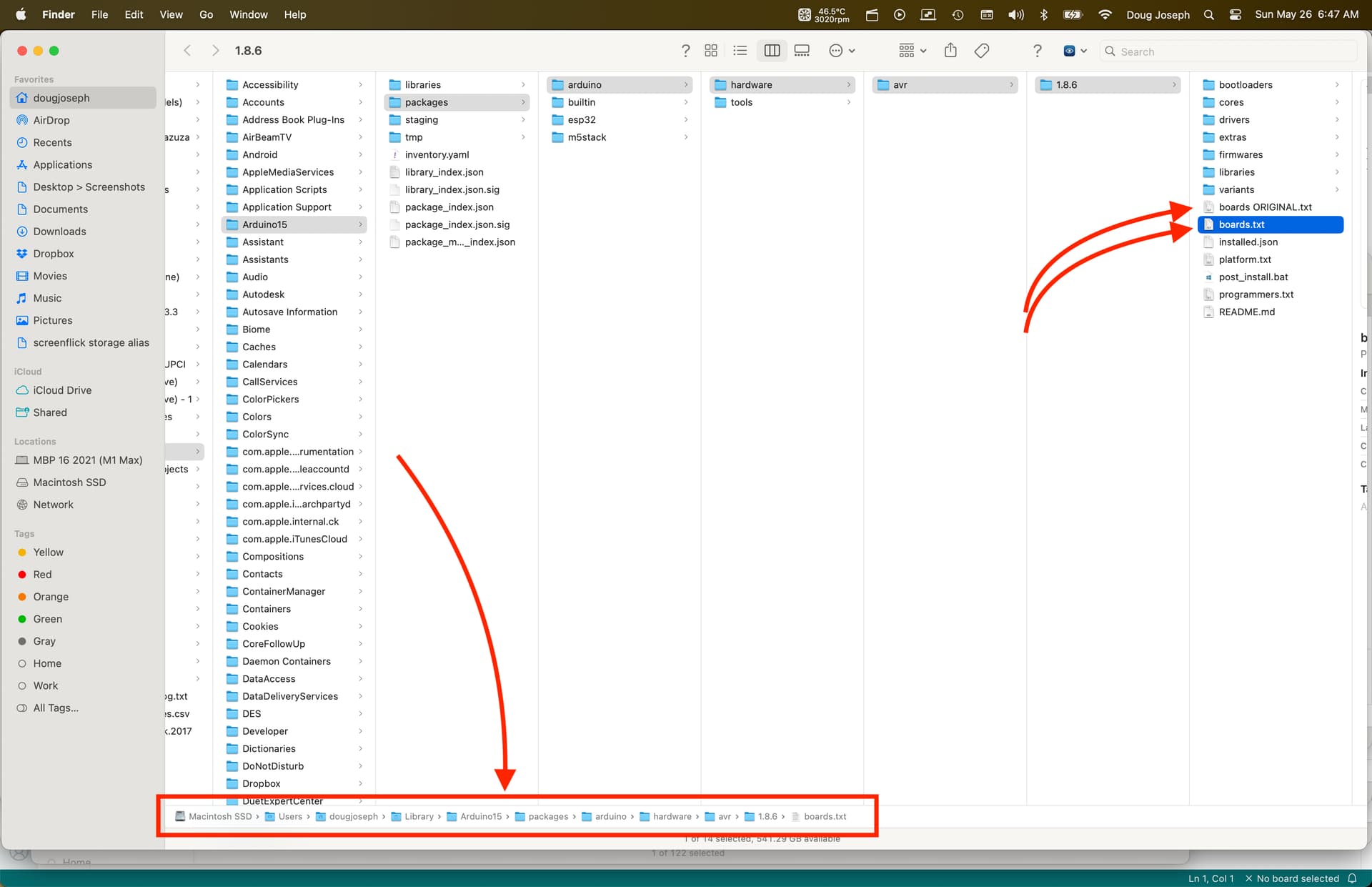
Here are some screenshots and my modified “boards.txt” in case it helps any other MacOS users attempting this build. In fact I’m including both the original boards.txt and the modified one. Their file names tell them apart. Use actual final filename of boards.txt.
Boards.txt, both Original and Modified versions.zip:
Boards.txt, both Original and Modified versions.zip (12.2 KB)
Screen shot of editing the file in its normal location:
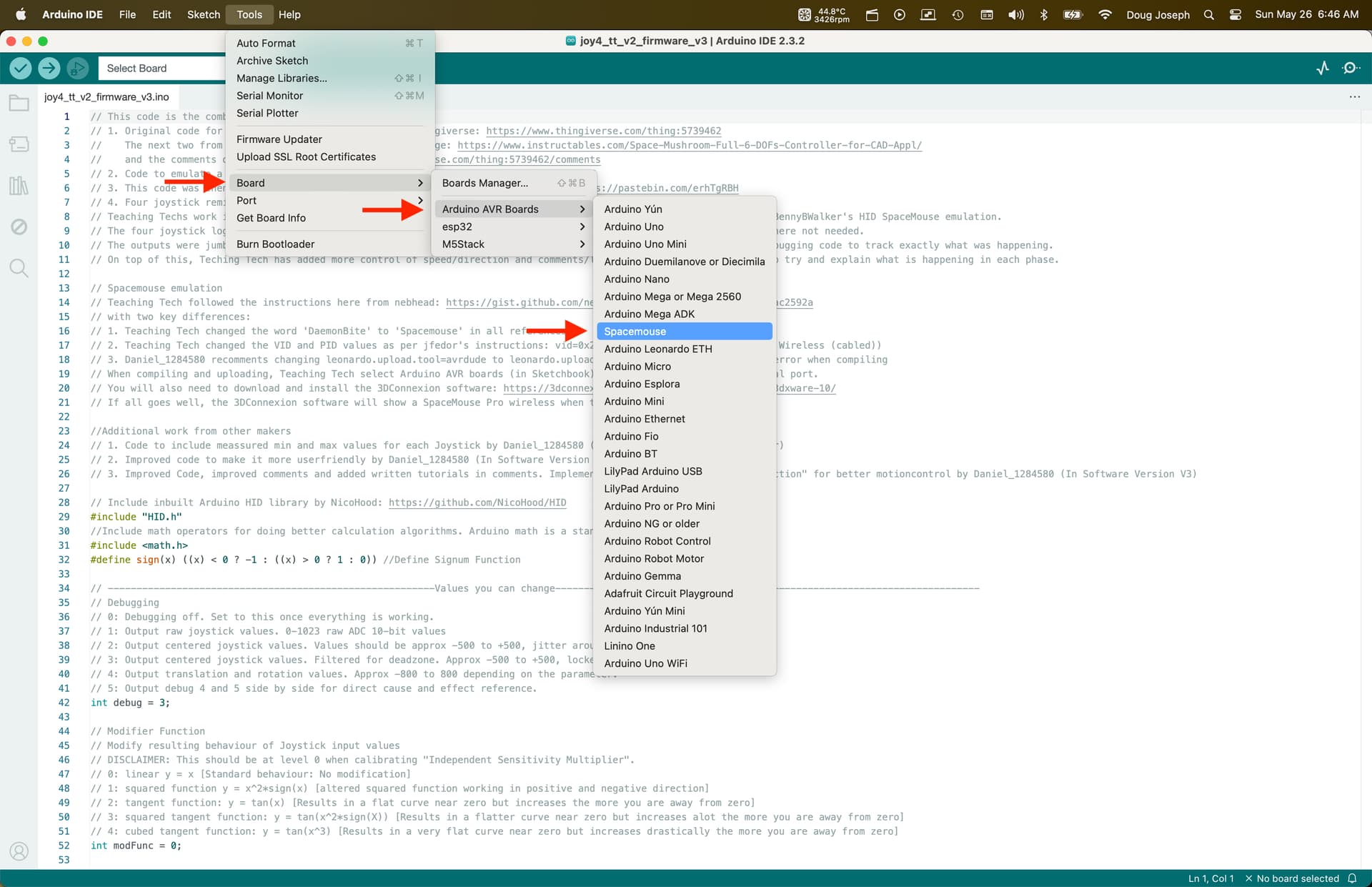
Screen shot of choosing the new “Spacemouse” board in Arduino IDE:







{kind=link}