Hi guys,
A few updates,
First, during the last week I took apart most of the BOx printer in order to upgrade a few components. The roller parts had melted pretty seriously because of the stepper’s heat, and I had some cracked parts here and there since the beginning.
I forgot to take pictures of all that unfortunately, it took me a whole day from early moring up to very late at night.
But now it’s back together and printing better than ever, all good!
Someone asked me this weekend so I counted, and it seems I’m now only one spool away from celebrating 60 kilos of material printed with this machine since I finished it. It works insanely well, I can’t be happier, I can’t remember when was the last failed print due to the machine.
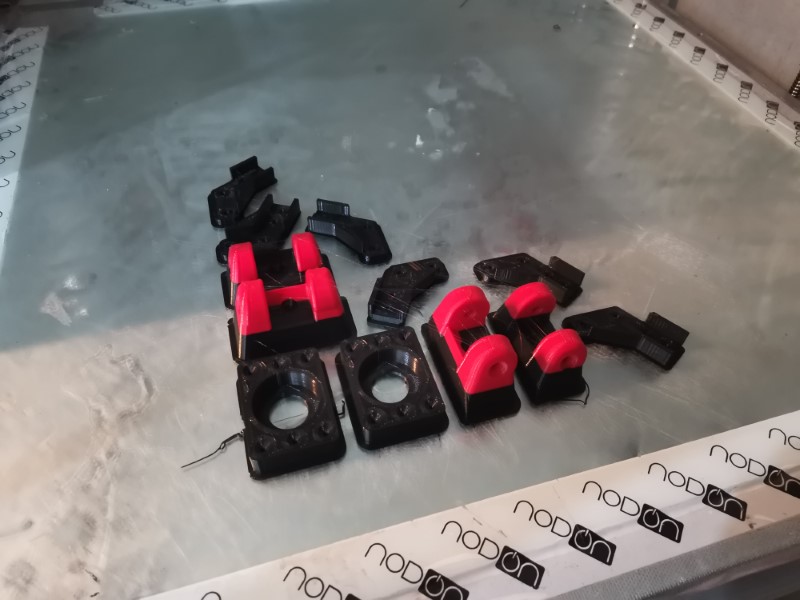
Some parts I printed for work this weekend (the weird bi color scheme is only because I didn’t have black filament anymore). Took about 4-5 hours to print these. I printed a full kilo on saturday with many big parts
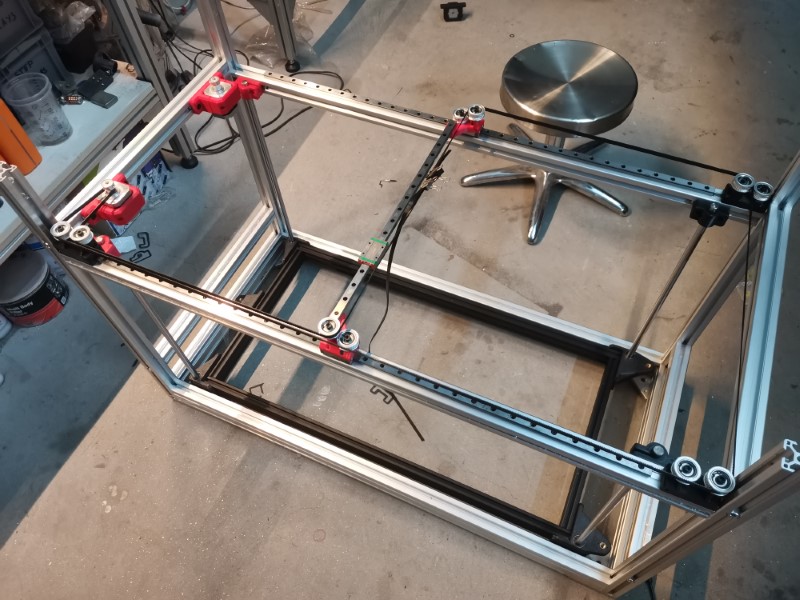
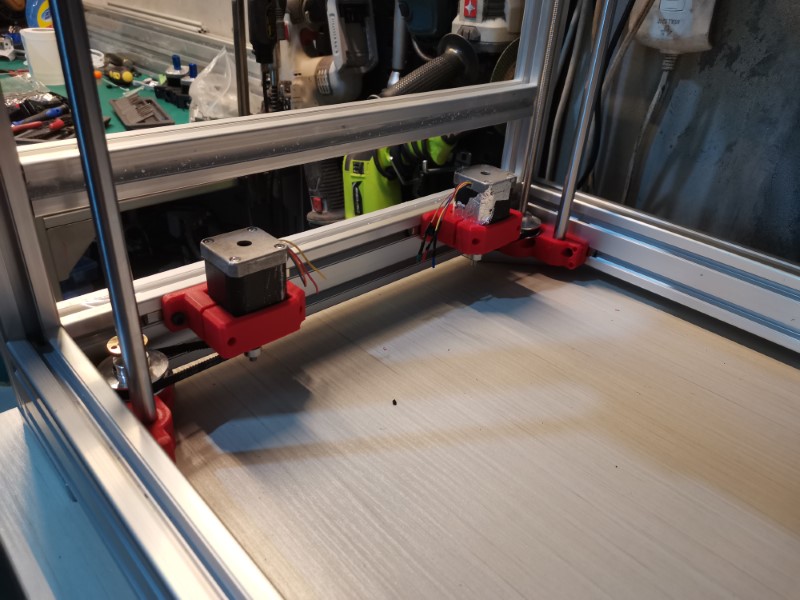
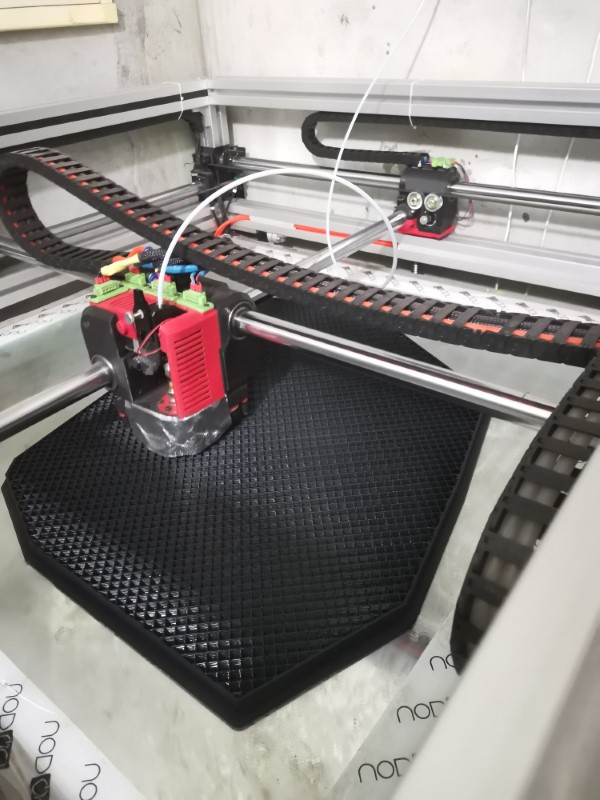
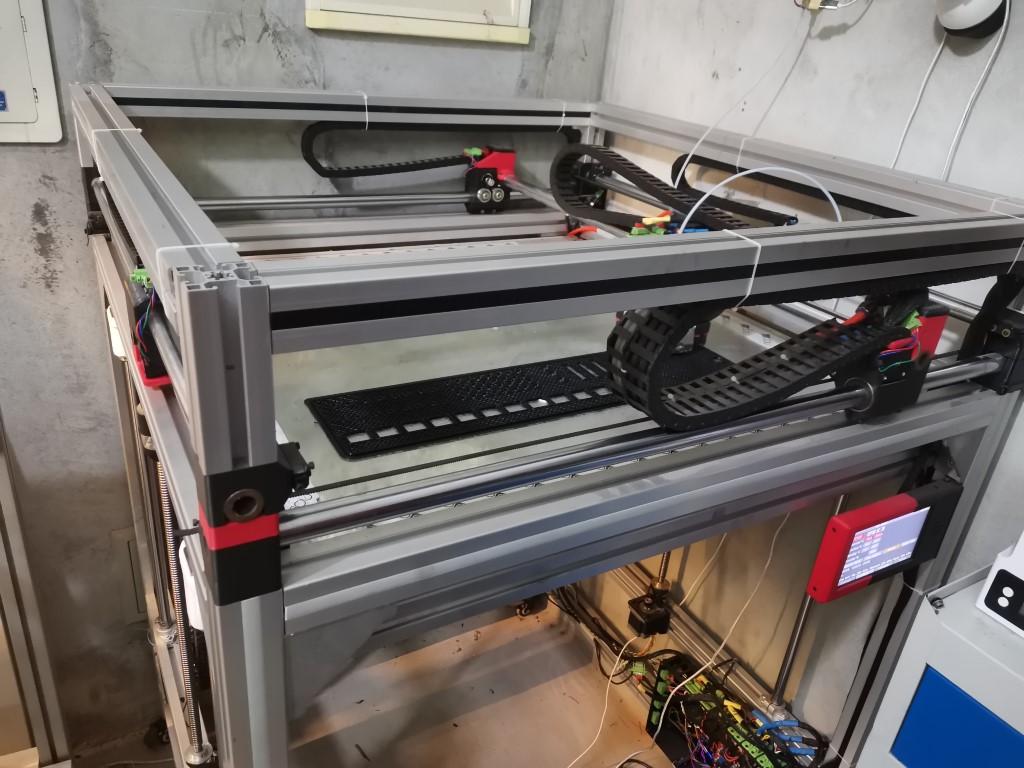
Anyway, also made some progress on the CoreXY. It’s moving on all axis now.
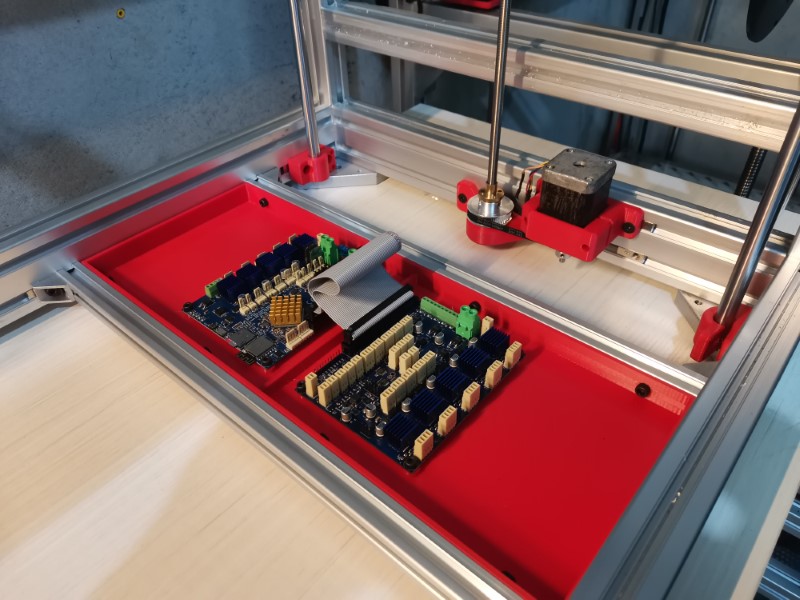
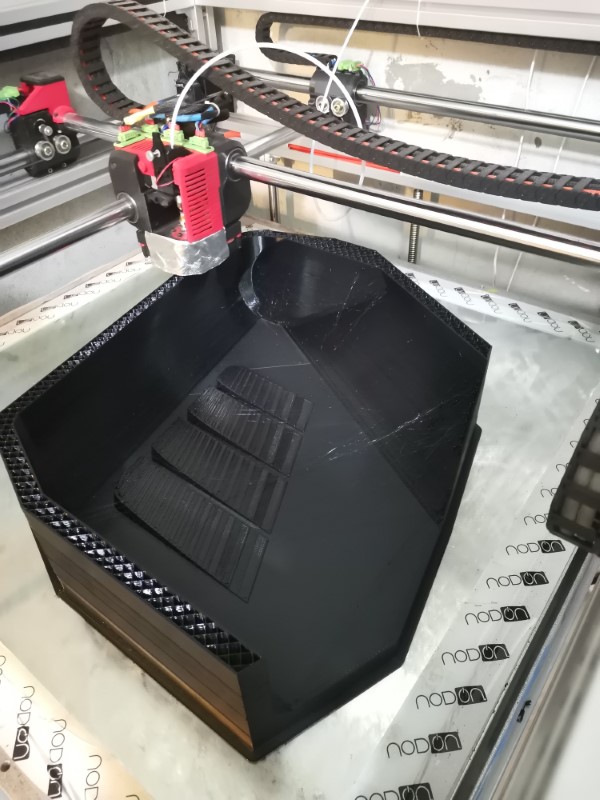
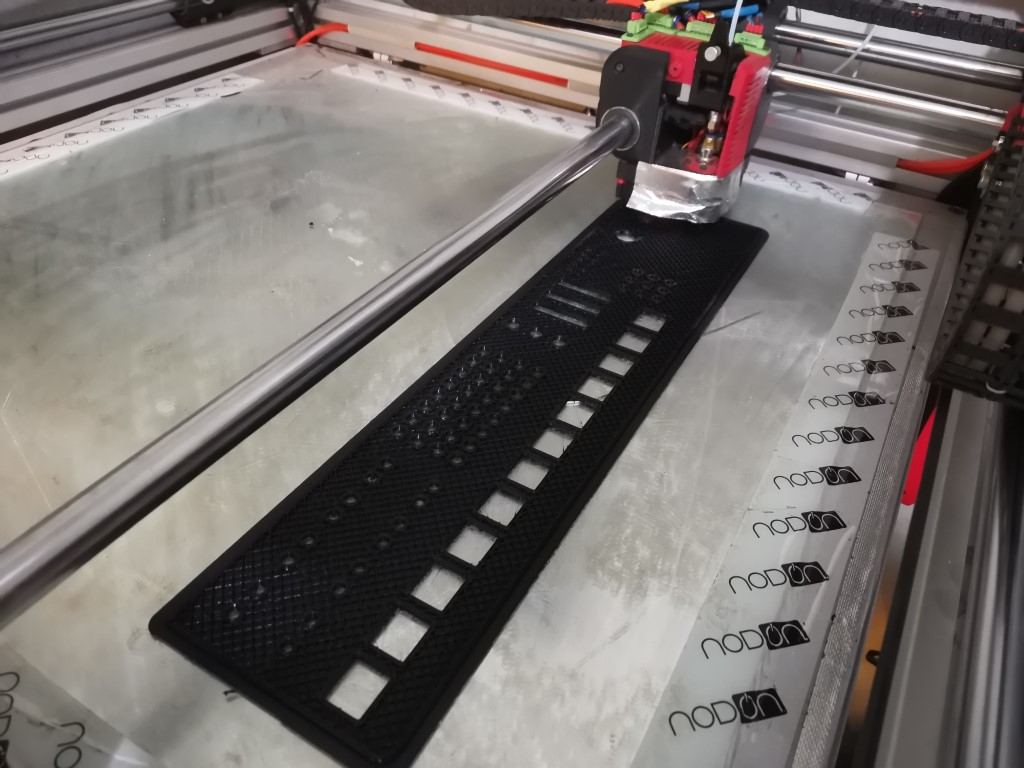
Installed the Duet2Wifi and the DueX5 boards. This big red tray was printed on the BOx (took a bit more than two hours):
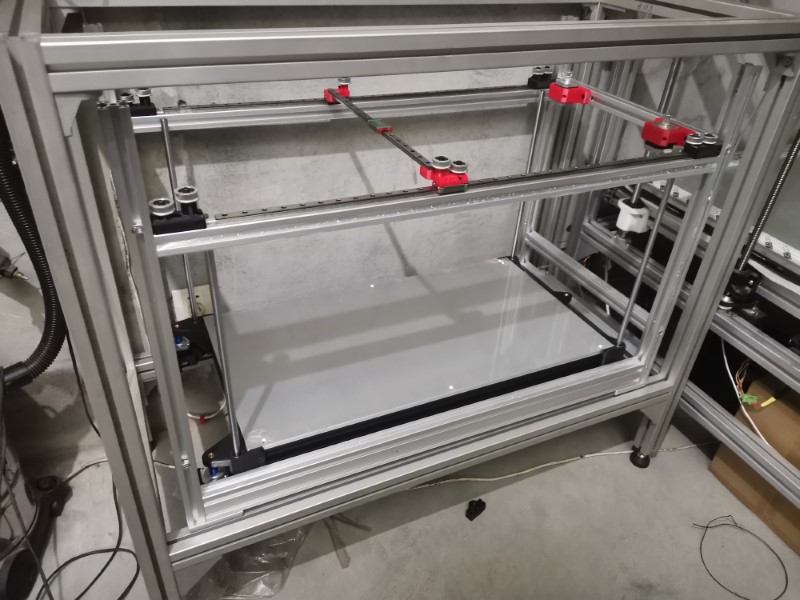
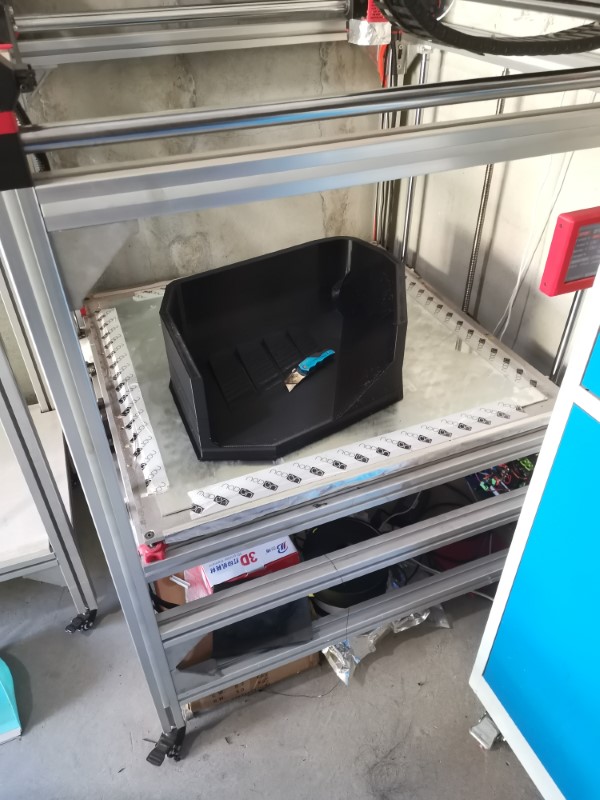
Made a first version of the Z lifting system, very basic but so far it works well:
The Z axis is a bit slow due to the very heavy bed plate (about 10 kilos) and the high demultiplication (I’m using big pulleys and also 1mm pitch lead screws), but it lifts the bed without any trouble and I can tweak the belt ratio later to get more speed if I need it, or go for a lower microstepping rate.
The X and Y axis are lighting fast though, these moves were done at 800mm/s and 20k mm.s2 accelerations.
This seems to be the maimum top speed it can reach reliably at this microstepping rate, but the accelerations could go higher.
(I can’t seem to be able to embed this video in the post, don’t know why but it’s very frustrating) Heffe: it has to be on its own line, with empty lines above and below. Or maybe it wasn’t public at first?
But this isn’t really meaningful until I got the print head installed, because it’s mass will determine what kind of accelerations I can realistically go for. I aim for about 10k mm.s2, that would be a nice achievement already.
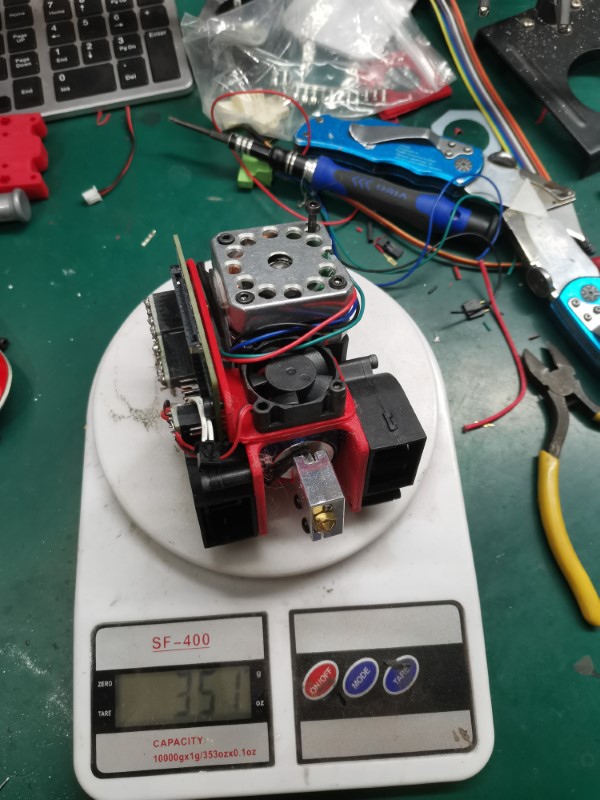
I’m currently working on it, I try go get it as lightweight and compact as possible but still packing the most cooling I possibly can (because cooling is key at high speeds)
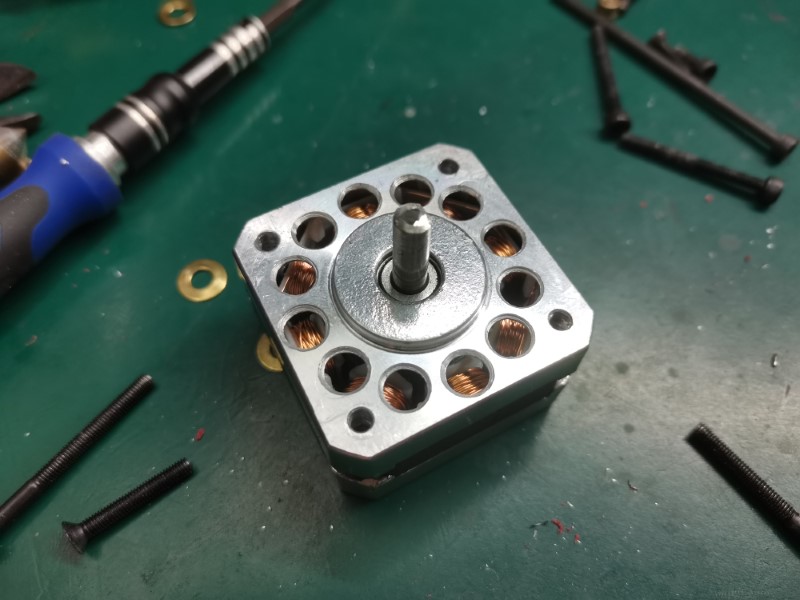
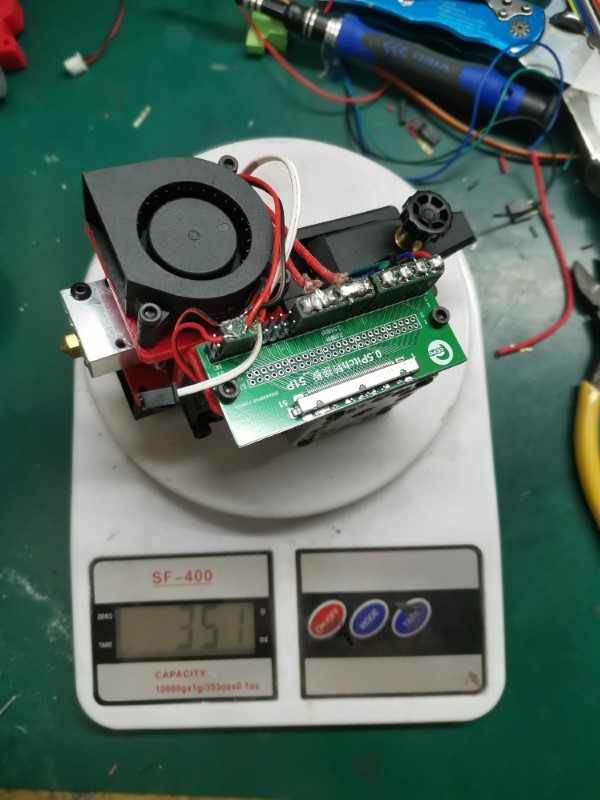
I’m using a volcano nozzle, this time it will be air cooled because of weight concerns, and I’ll use a PT100 sensor to get more accurate temp reads. Some big blower fans on each side for part cooling, I’ll make some kind of shroud to direct the air in the proper places. A plastic dual gear extruder since you guys totally convinced me that those are the bomb, I never had any extrusion problem since I installed one on the BOx. Using one of the smallest steppers I could find to lower the mass (20mm thick). Last but not least, it will have a BL touch for bed leveling. So far the weight is a little bit under 300grams, I don’t think I can make it any lighter than that with regular 42mm steppers. Hopefully this won’t be too heavy…
I’m now wondering about the wiring to the print head, I want that to be as compact, flexible and weighless as possible so I’m thinking about experimenting some wires with very thin insulation.