i have built a MPCNC PRIMO im using a mks tinybee with fluidnc any one has a config.yamil file
Hello, Bazy and welcome to the V1 community forums. We’d love to see a build thread for your Primo build, both to celebrate your build and to provide documentation for other users.
I don’t have a Tinybee board so can’t confirm the config- but there are threads here on the forum with some info. For example, this one:
If you do get a config.yaml that works correctly for you, it would be good to contribute that back to the forums.
hey @MakerJim thanks for your reply
ive checked this thread they using tmc2209 with uart not working for drv8825
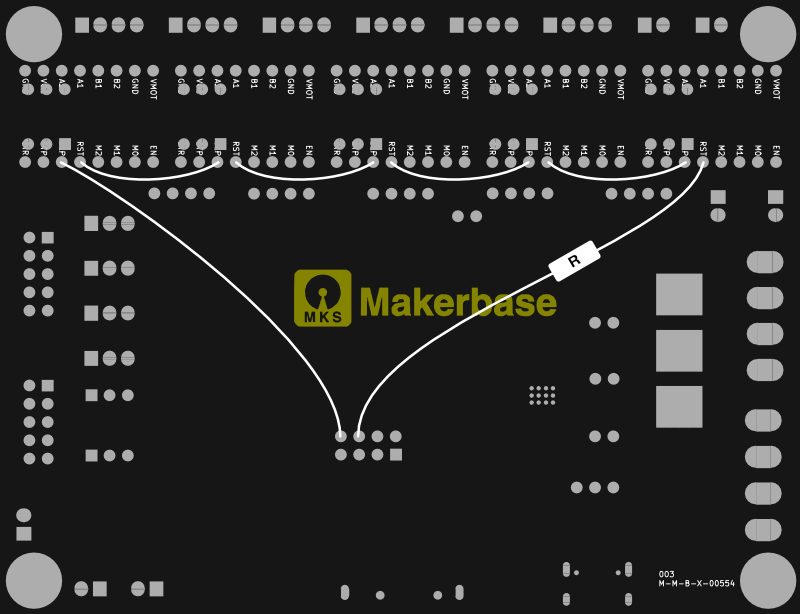
TinyBee is incapable of using UARTs on the TMC drivers without making jumper setups manually. If you’re comfortable soldering and modifying your board it can be done, but otherwise you have to run your TMC drivers in standalone mode.
Edit to add:
The modification needed is shown here:
There are also example configs, but those will need to be modified if you go through with getting UARTs working on your board. You’d also have to modify the examples for the Primo setup.
Also to add: If I’ve completely missed your need and you’re only going to use DRV8825, I think the FluidNC configs shown on the FluidNC web page are a good start, you will need to rearrange those to match the motor/axis/endstop config of your primo.
he is using 8825s , no uart.
I am not sure of anyone using the tinybee for mpcnc. I have lr4, but that will not help you.
I am sorry.
here is my lr4, hope it helps!
together with the wiki this should get you going. I too am using 8825’s
board: MKS TinyBee V1.0_001
name: LR4
kinematics:
Cartesian:
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
axes:
x:
# X
steps_per_mm: 50
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.33
hard_limits: true
pulloff_mm: 7.000
stepstick:
step_pin: I2SO.1
direction_pin: I2SO.2
disable_pin: I2SO.0
y:
# Y
steps_per_mm: 50
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 2440
soft_limits: false
homing:
cycle: 3
positive_direction: false
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 1550.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.32
hard_limits: true
pulloff_mm: 5.000
stepstick:
step_pin: I2SO.4
direction_pin: I2SO.5
disable_pin: I2SO.3
motor1:
limit_neg_pin: gpio.35
hard_limits: true
pulloff_mm: 5.000
stepstick:
step_pin: I2SO.10
direction_pin: I2SO.11
disable_pin: I2SO.9
z:
# Z
steps_per_mm: 200
acceleration_mm_per_sec2: 1200.000
max_travel_mm: 300.000
acceleration_mm_per_sec2: 80.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 0.000
feed_mm_per_min: 300.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_pos_pin: gpio.22:high:pu
hard_limits: true
pulloff_mm: 4.000
stepstick:
step_pin: I2SO.7
direction_pin: I2SO.8
disable_pin: I2SO.6
motor1:
limit_neg_pin: gpio.36:high
hard_limits: true
pulloff_mm: 7.000
stepstick:
step_pin: I2SO.13
direction_pin: I2SO.14:low
disable_pin: I2SO.12
i2so:
bck_pin: gpio.25
data_pin: gpio.27
ws_pin: gpio.26
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
EXP1 BTN_ENC
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0: $SD/Run=lasertest.gcode
macro1: $SD/Run=home.gcode
macro2:
macro3:
coolant:
flood_pin: NO_PIN
mist_pin: NO_PIN
delay_ms: 0
probe:
pin: gpio.39:low
check_mode_start: true
Laser:
pwm_hz: 5000
EXP1 BTN_ENC
output_pin: gpio.13
FAN1
enable_pin: I2SO.16
disable_with_s0: false
s0_with_disable: false
tool_num: 0
speed_map: 0=0.000% 0=12.500% 1700=100.000%
135=0mA 270=5mA 400=10mA 700=16mA
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
start:
must_home: false
1 Like