The new Y axis drag chain is more recent and I had not posted much about it yet.
Here’s a video:
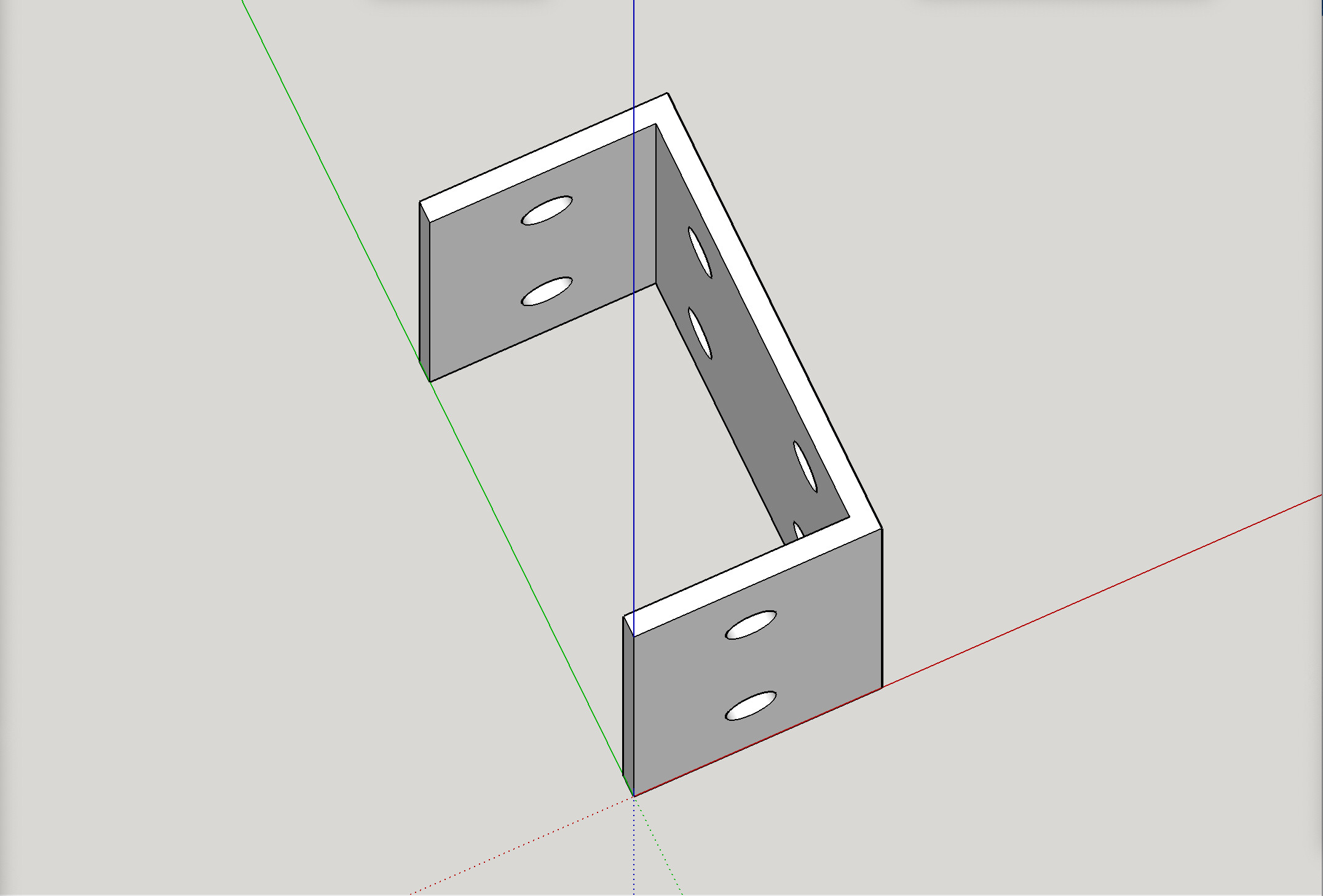
The drag chain holders are available on Printables here: Printables
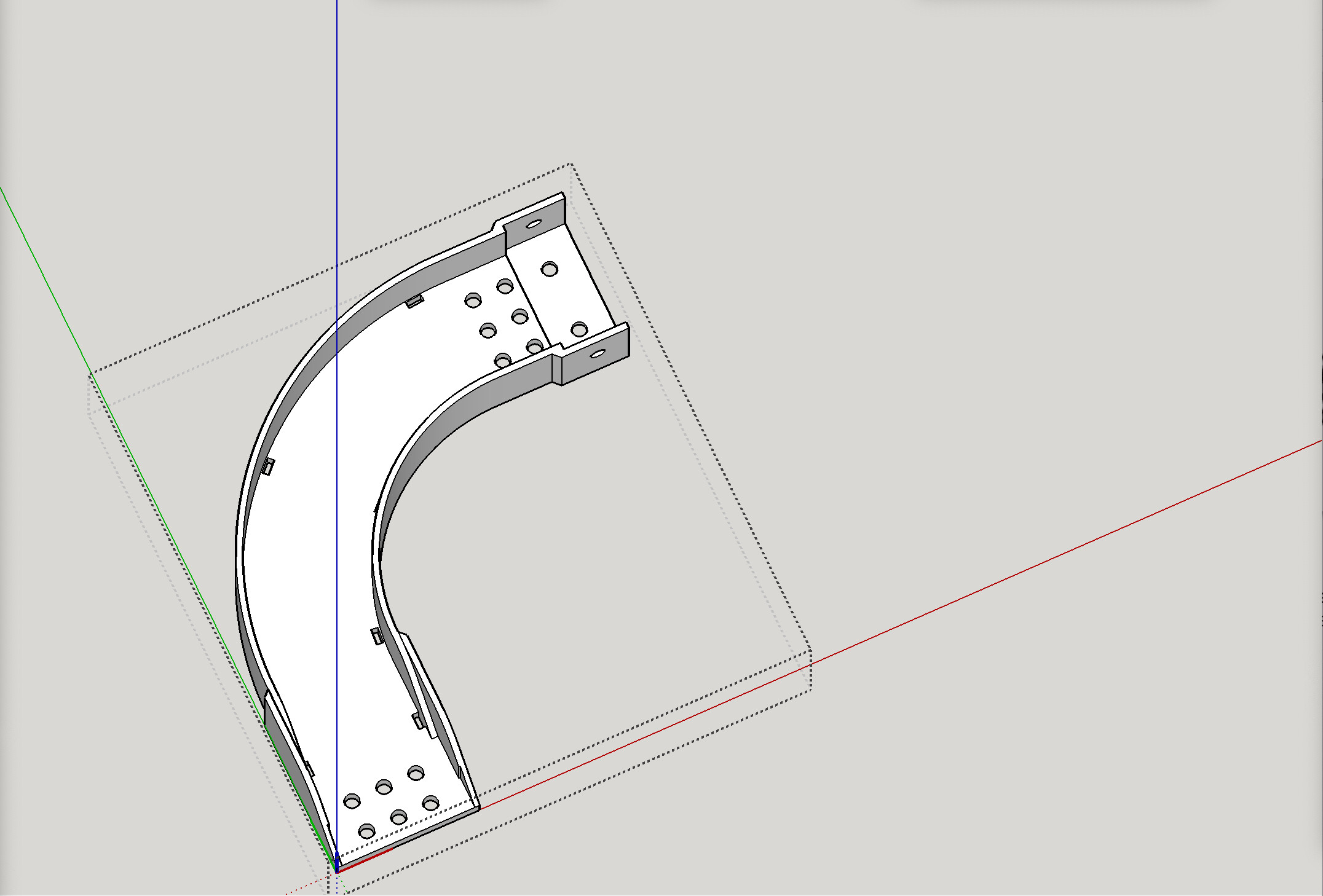
The big 90-degree raceway should soon be up on my Patreon page here: Patreon
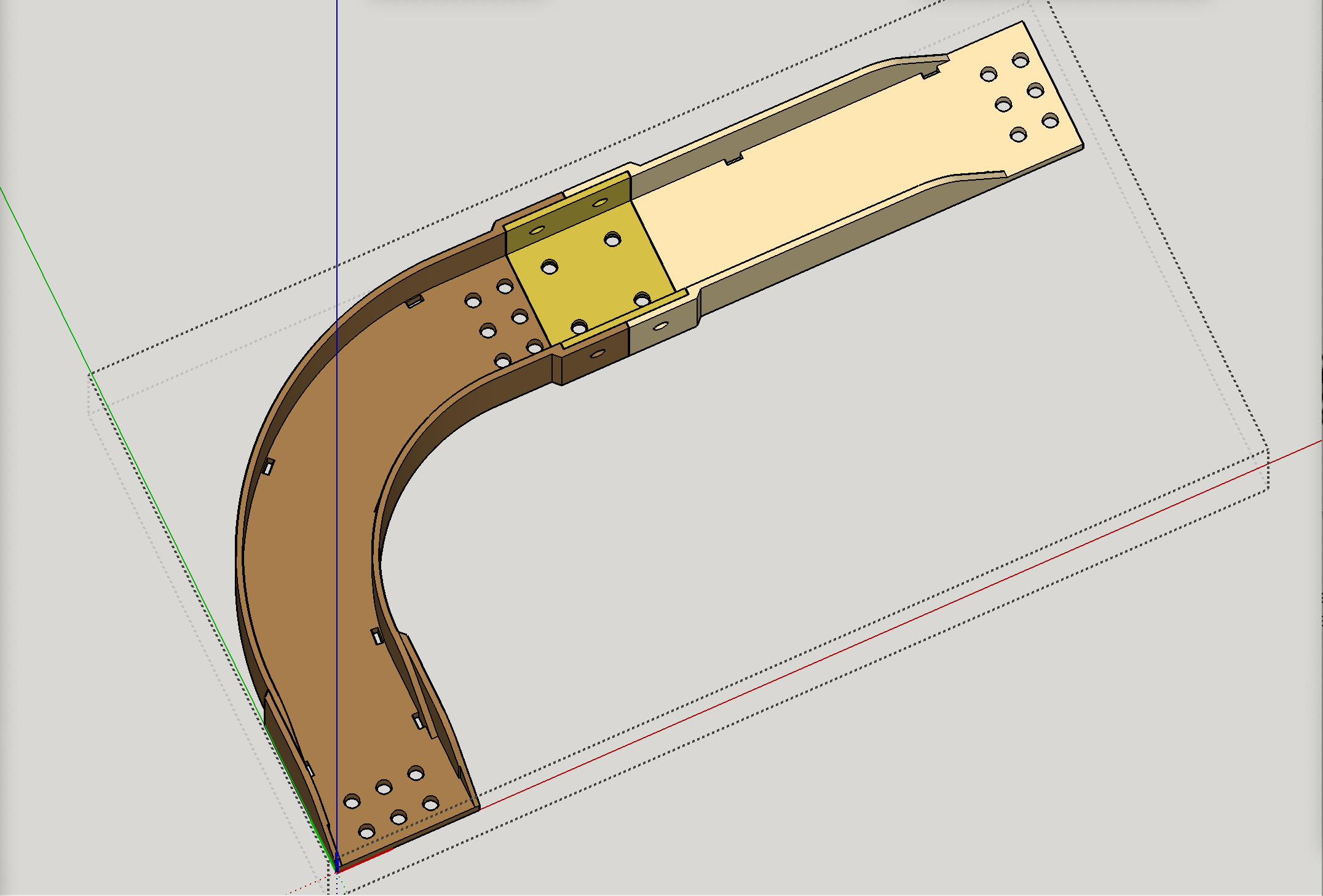
Update: the “Drag Chain 90 raceway curve” is indeed now available on my Patreon page, but that was a huge print, so I also offered a revision of it that’s split into three pieces so it can be accomplished on a normal printer.
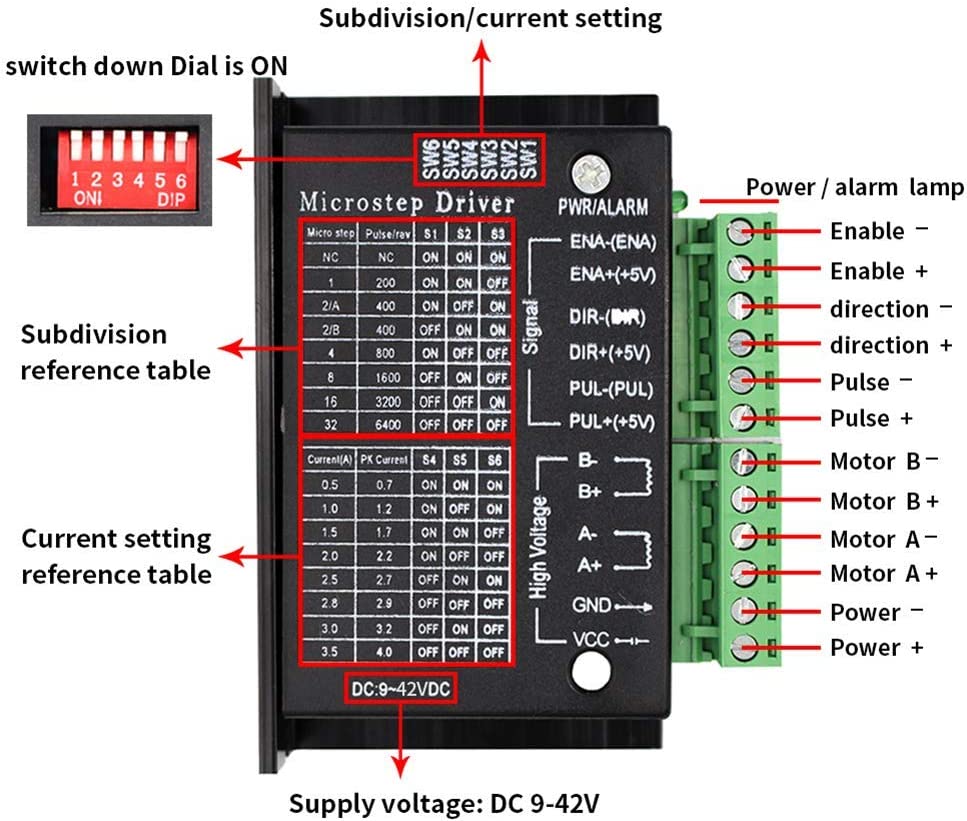
I feel sheepish. For the dip switches on the TB6600 I had assumed “up” was on. But according to this Amazon image from the sale listing, “down” is on. ??
@vicious1 is that how you are reading yours? Down is on?
One reason this may matter is earlier (post above) where I mentioned what I thought @kd2018’s and your power settings were, I was possibly misreading the chart because of having on and off backwards in my head.
OK another minor milestone reached: I figured out the homing setup in LinuxCNC well enough to get a successful cycle test (dry run of a cut without plasma turned on).
Now I turn my attention to getting the height set right for the probing with floating Z, and the pierce height and cutting height, etc.
My steppers might not like being run at 1.5A, that is a lot. We run the LR at .8 normally.
Well who knows with all the conversions that go on on the 2209’s maybe we are not at .8. The steppers can withstand up to a burst of 2.5A, but keep a real close eye on the temps. They will get hot enough to melt the printed parts in a hurry if you are not careful.
My build followed @uthayne 's build (SOMD - Lowrider Plasma CNC), I upped the amperage based on his experience. I believe he mentioned back then that the extra amperage should help with faster accelerations that plasma calls for.
I’ve never really personally wrapped my head around stepper specs, curves, etc. @vicious1 is the expert, I say start with his recommendations and maybe tweak your way up if you have to.
Every machine is different, check your machine’s manual. If your manual doesn’t have any suggestions then as a reference mine suggests a pierce height of 0.15in (3.8mm) and a cut height of 0.06in (1.5mm). You could start there and fine tune with lots of testing.
OK, this part → “make sure it’s direction and not step signal”
…is an area where I still have confusion. Thanks!
I finally have a fully working, perfectly orienting homing setup and motion control system. It could probably be tweaked to avoid having to manually edit the INI file to remove minuses from the STEP_SCALE values!