No, it proves their wacky endstop circuit is defective.
Most likely not the issue, but 60W is a little on the low side.
Yes.
The test to prove or disprove this would be to hook up your DMM to the 5V rail (you can use 5V and ground from an unused endstop pin location). If the 5V supply rail drops below 5V when you’re homing then MAYBE you have too small a power supply. If not, then BTT’s tech support is full of hooey.
Keep troubleshooting first, but things are pointing towards a bad SKR pro.
Historically the SKR Pro has been a pretty good board.
Is the V1 Jackpot an option for you? Maybe ordered from the alternate manufacturer?
10A is a bit much, but not that much. 60W (2.5A) ought to be enough if it is working properly. That is the size of the power supply sold in the V1 store.
More telling woult be to measure the power supply voltage, as that will also tell you if the power supply is sagging under load. If the power supply is not sagging under load, then check the 5V rail. if that is sagging, then there is something wrong with the 5V supply circuit, because you just showed that it’s still being supplied with 24V. If the 5V (Actually the 3.3V which feeds off of the 5V) rail is not sagging, then it’s the stupid LED setup that’s dragging the current down.
Hello masters!
Bitreetech will send me a new skr 1.2 pro at low cost, it will take some time, but as soon as it arrives I will update you.
Question: But which component of this card do you think could be broken? That is, could we try to fix it somehow?
Alternative: How can I use a board without endstop switches?
V1 firmware does not actually require that you home the machine, so you can just use it. Many people have built machines without end stops at all.
However, auto-squaring requires the endstops, and it’s a very nice feature.
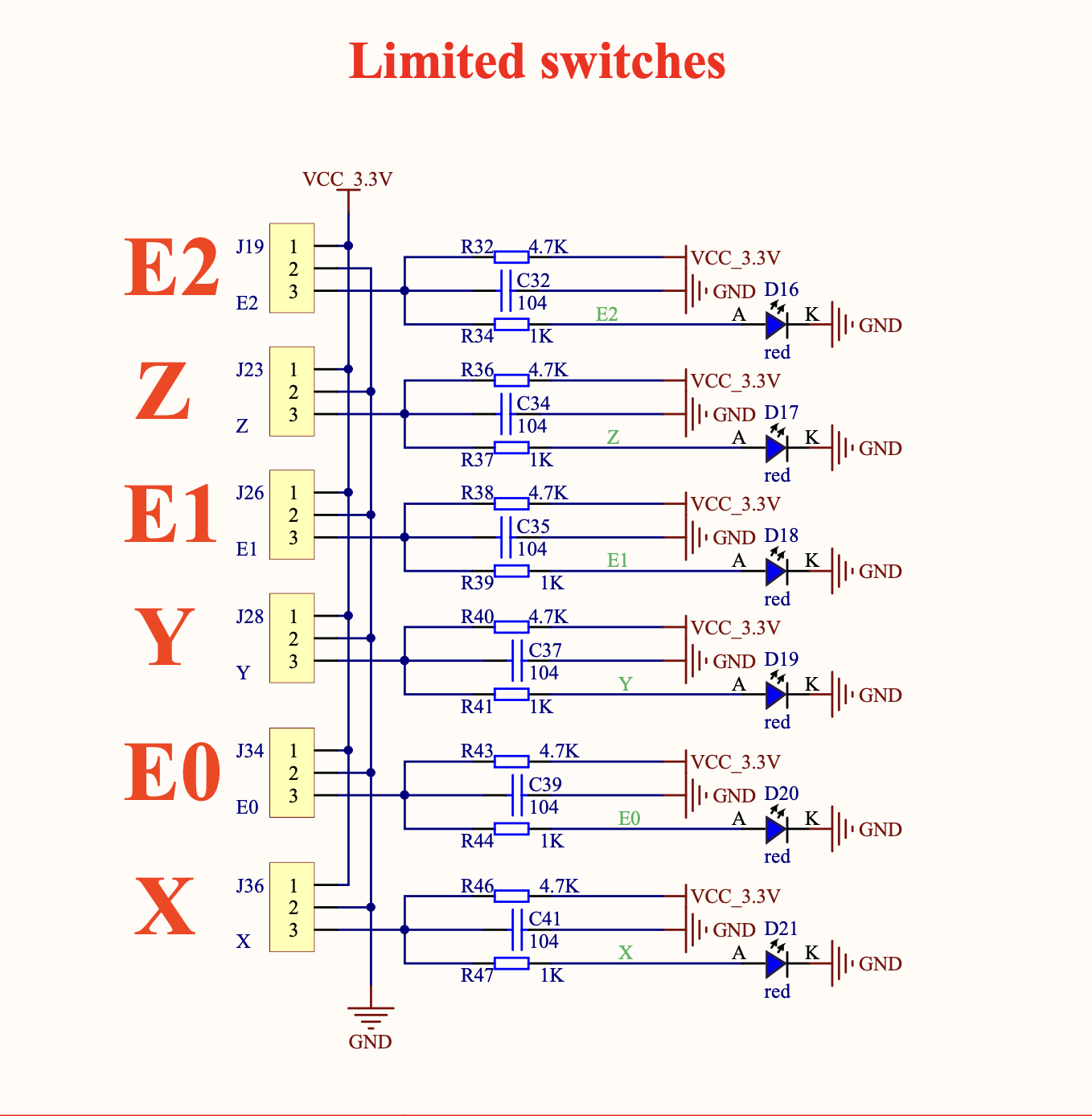
If those were still reporting “open” when you jumped the 3.3V (V+) directly to signal, then the buffer to the CPU (Or the CPU pins) are damaged. I suspect the buffer, since all of the endstop pins were nonfunctional. The buffer chip was probably failed, and also drawing current from the line.
Though destructive, the other way to bypass the problem that causes the end stop switches to not work is to remove the LEDs from the circuit board. This prevents the LED from drawing off the current which causes the voltage to drop. of course once you do tghat, BTT probably won’t take it back as it’s been deliberately damaged.
Okay, I didnt look at the schematic, but it does seem odd that a direct connection of the signal pin to the +V still read open. The +V is 3.3V. OP reported that the LED got brighter (as expected) but stop still reported as open.
Maybe the CPU has them internally buffered? Likely also then that skmething else isn’t working. Wouldn’t be surprised then if thermistor ports were also smurfed.
Print or make some blocks to hold against the gantry at startup. These “hard stops” will ensure the machine is as square as the frame. Once you engage the motors, they will move in lockstep and stay thay square until you disable the motors.
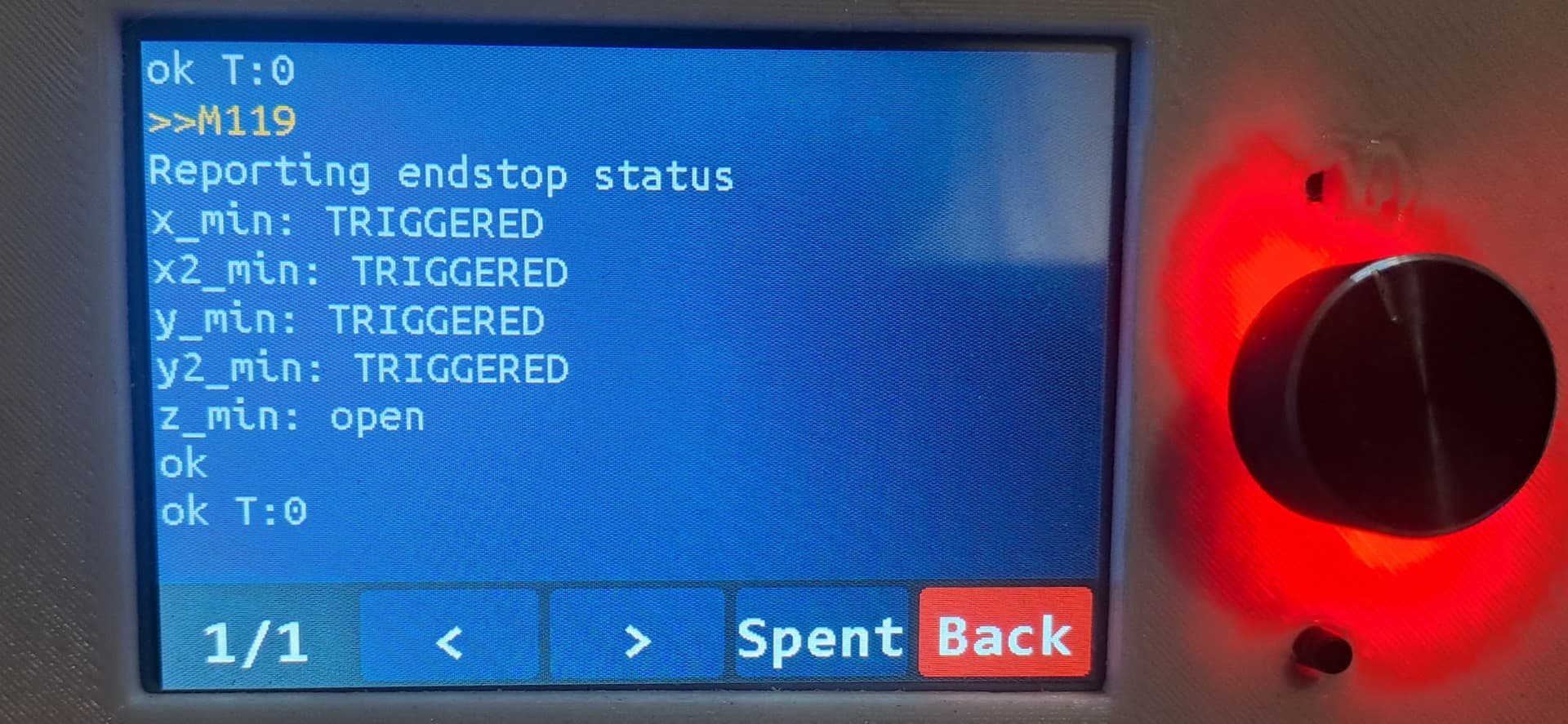
Did you wire them as normally closed? Because the light being on when it’s not pressed tells me they’re probably wired as normally open. Those lights should be off unless the end stop is activated.
Hi Dax,
do you mean this: #define Z_MIN_PROBE_ENDSTOP_INVERTING true
in any case today I will do some tests and recompile the firmware starting from the basic version because after the 1000 tests done with the old card I wouldn’t want to have left a few typos here and there.
No, that will change the Z Probe behavior. Inverted = True means that the probe will show active when the mill touches the probe (desired). The Probe endstop LED should show as lit when inactive, and go out when active.
I think that @Dax was questioning how the other endstops (X, Y1, Y2, Z1, Z2) were wired, as the LEDs were always asserted. I think he missed your post where replacing the board solved the problem.
I find it difficult to even thinknof where to draw the line between “basic” and “advanced” as soon as you delve into the source code (even just a configuratuon file) that’s getting advanced in having to recompile, and a stray keystroke.somewhere in the code can really mess you up.
We’re pretty much willing to help, and can point you out where the parameters are and what they do.
If you are interested, I suggest looking into the tools you need for your board of choice. In the case of the SKR Pro, that’s VSCode to modify and compile the Marlin source. Start with being sure you can produce a “firmware.bin” file, then look into the “comfiguration.h” file.for the parameters you want to change.
Be aware that VSCode and the Visual Studio install is a moving target, as these change somewhat regularly. I installed that within weeks of a guide being written, and it was different. Not enough that I couldnt follow it, but I’m a prigrammer by trade, so installing development tools isn’t something that I should struggle with.
If you use the official V1 issued firmware, no other configuration should be needed. Once you have everything up and working for a few weeks/months, THEN if you find you want to make mods (increase max feedrate or stepper current), you could make incremental changes as desired (I won’t say as needed, because you probably wont NEED to make any changes)
Anyway, I have already compiled Marlin several times, even for a 3D printer, I really wanted to know what “fundamental” settings should be set, such as the bed size.
I will measure the length of my X and Y axes by moving the printer.
Thanks guys!