Hi guys. As the name suggests I am in trouble trying to configure a huge pen plotter I bought from China. I basically have this A0 structure in Hbot configuration that I would love to wire with MKS-DLC32 controller (with silent trivers, I think TMC2209) and display. Any idea how can I configure the board for such configuration?
Hey there mister! Isn’t this fortunate? I’m working on precisely the same setup! Welcome to the forum
Im using fluidNC, based on grbl. Really neat, but sometimes confusing coming from the marlin world.
Haha, indeed you are right! I’m sorry for confusing. I was just happy to see someone else trying to figure out the MKS DLC32 for a plotter. I still think we can benefit from sharing experiences during the build though. I’d still suggest fluidNC. I did never try the Makerbase default firmware though, perhaps it’ll suffice?
For sure we can share the project, it would greatly help both. Atm I received a machine that is hbot while I ordered a corexy, I’m trying to figure out how to solve with the seller. Btw the final idea is to switch to a cartesian with dual Y stepper, since the machine is very big (A0 format). I’m a bit of a thinkerer so I guess I’ll make a custom CNC and then configure Makerbase or fluidNC to my needs. The actual control unit they shipped to me is compatible with axidraw software, it is not that bad actually but definitely not the most customizable thing. Did you managed to plot something?
I am in the process of designing, building, and configuring FluidNC for a custom laser engraver and it sounds like it is a very similar situation to what you are looking for. Cartesian system with dual Y motors for autosquaring.
You can check out the progress of the build here and I would be happy to help work through your build with you if you need anything.
Thanks for sharing man. Is FluidNC compiled from scratch or was something already precompiled? Moreover I will need to control a servo for the pen/pencil.
FluidNC is a firmware that you will flash onto your MKS DLC32. FluidNC requires a configuration file or “YAML” file which tells the controller how your machine is setup (steppers, endstops, I/O ports, and other config items). So you will flash FluidNC to the controller and then upload your custom .yaml file to the controller for it to use.
The YAML files are really not too complicated. You can take an existing one that closely resembles your machine and change around a few things to make it work for you. This is what I did. I took an existing YAML file for a cartesian machine with one Y motor, one X motor, and one Z motor. I then changed it by assigning the Z motor to be a second Y motor (Y2) and changing its corresponding endstop to respond to that motor.
Thanks for the tip. I’ll dig into it. My first concern is atm the accuracy. The structure is very big I need to achieve an acceptable repetibility on the movements. Moreover, I’m not sure if FluidNC is compatible with AxiDraw software, this would be great btw.
I’m not sure about the axidraw software, how well it works. It took a little learning to figure out how to deal controlling the fluidNC. I tried using my favorite gcode sender cnc.js, but couldn’t make it connect. I’ve ended up using the stock web GUI, ESP3D, which works fairly well. It’s inferior to cnc.js in my opinion, but when I got my head around how to CAM stuff in estlcam for this specific use, it turned out okay.
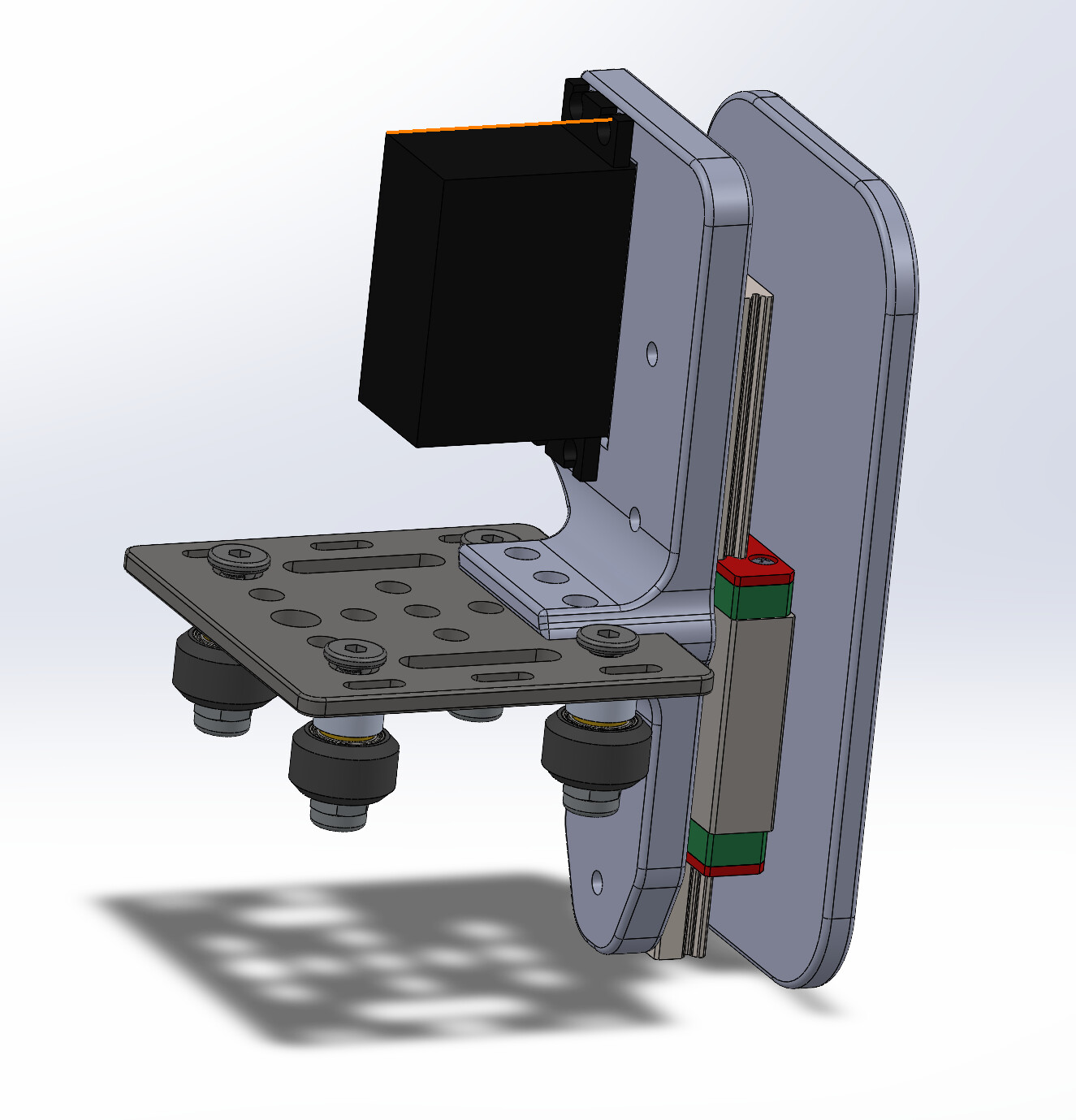
Yes - I’ve managed to run a servo from the MKS DLC32 board, I used the z probe pins. The config/yaml I posted is how I set up the servo. The z probe is pin 22 on this board.
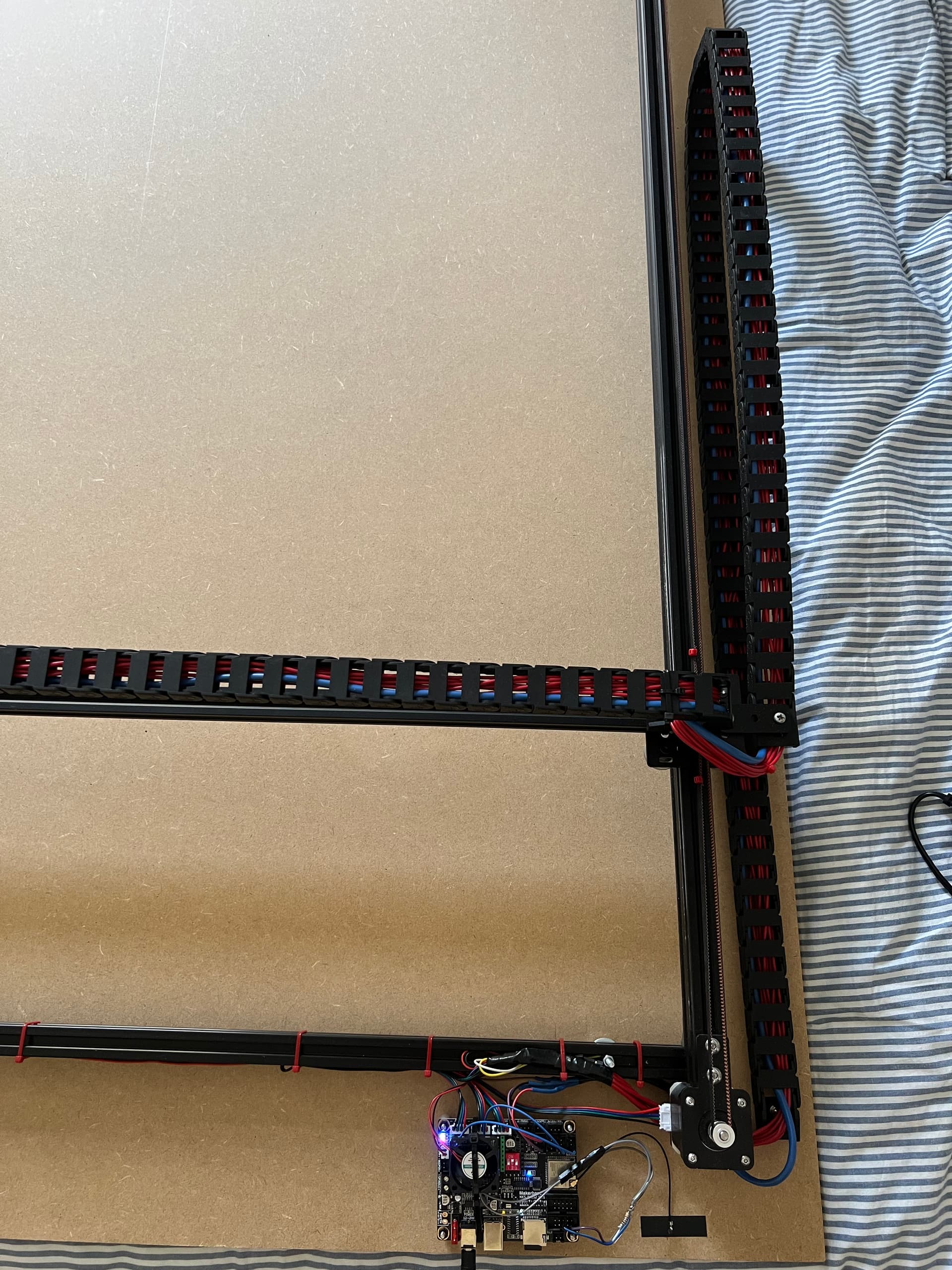
Hi everyone! Sorry for the late reply. I finally managed to buy so wood base in order to mount everything. I still miss to realize a couple of extension cable to properly try everything. And, btw, still waiting for main parts from china. However this is a picture of the build. I want to use one motor for x, one motor for y1 and another for y2. So that I should have sensorless auto homing like on 3d printers (for which I have a bit more experience). Right now I’m flashing the MKS DLC32 with FluidNC and I’ll try to understand how does this work.
As you can see I’m planning to use a nylon 3.85mm filament as guide for the x and stepper motor cables, while on the left I ordered a chain cable holder.
Probably in the very near future I’ll design a custom pen holder 3d printable is anyone is interested.
Any suggestion on how to create the gcodes? Will I even use gcode like in 3d printers for such machine?
The corexy setup is different, but I guess the config for tmc2209 drivers would be the same. I haven’t changed anything from the fluidNC wiki though. I have tweaked the vref-pot quite a bit. I did never figure out how to measure it with a meter and do the calculations - so I changed it back and forth until I found a good balance between the motors holding and not getting too hot. For me it’s quite close to the lowest setting, maybe only 60 degrees of rotation from there.
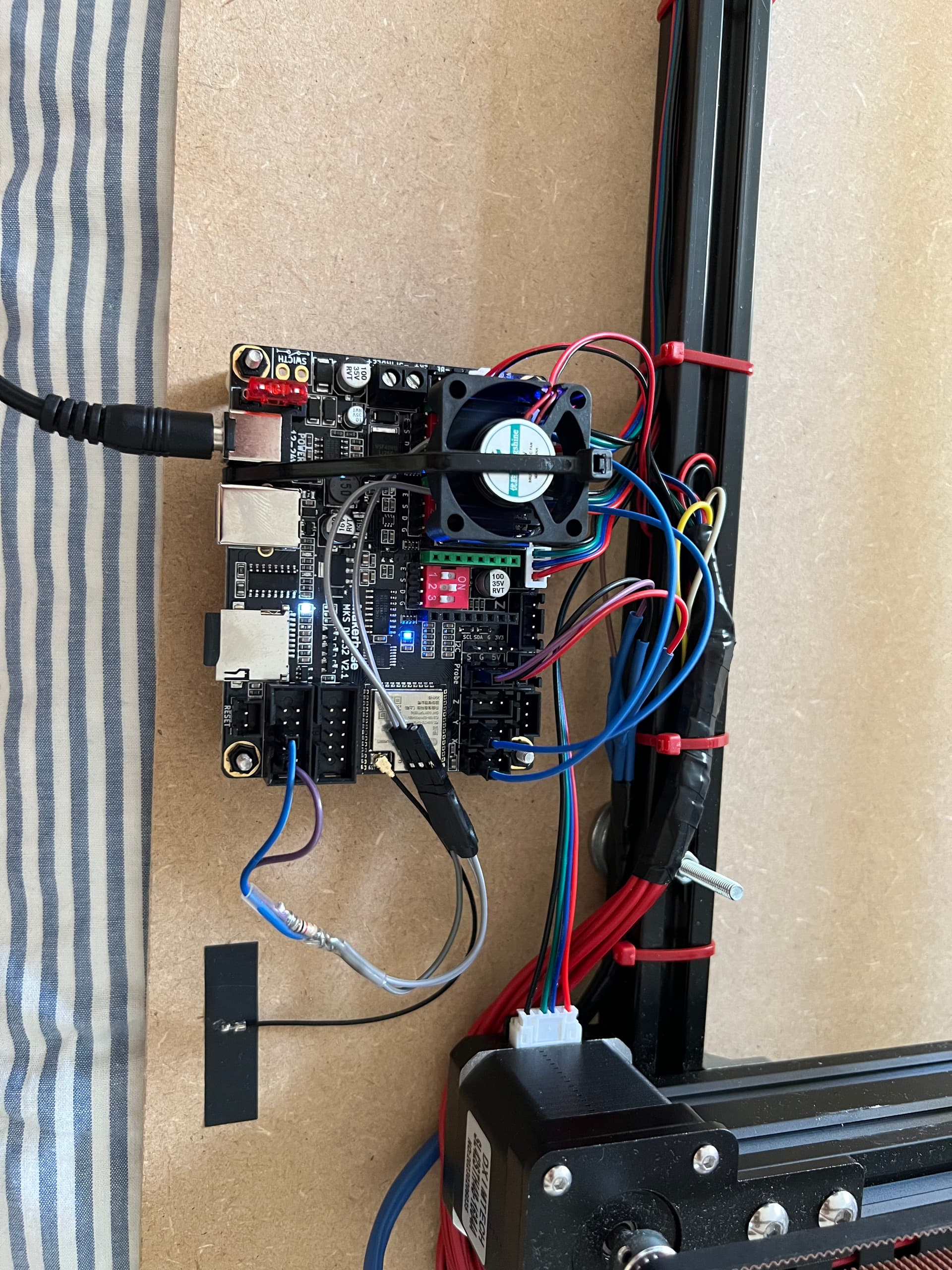
I did some advancements, now the board MKS DLC-32 has been modified to support UART for TMC2209 drivers. The thing I am missing is the sensorless homing right now. Seems difficult to get it work.
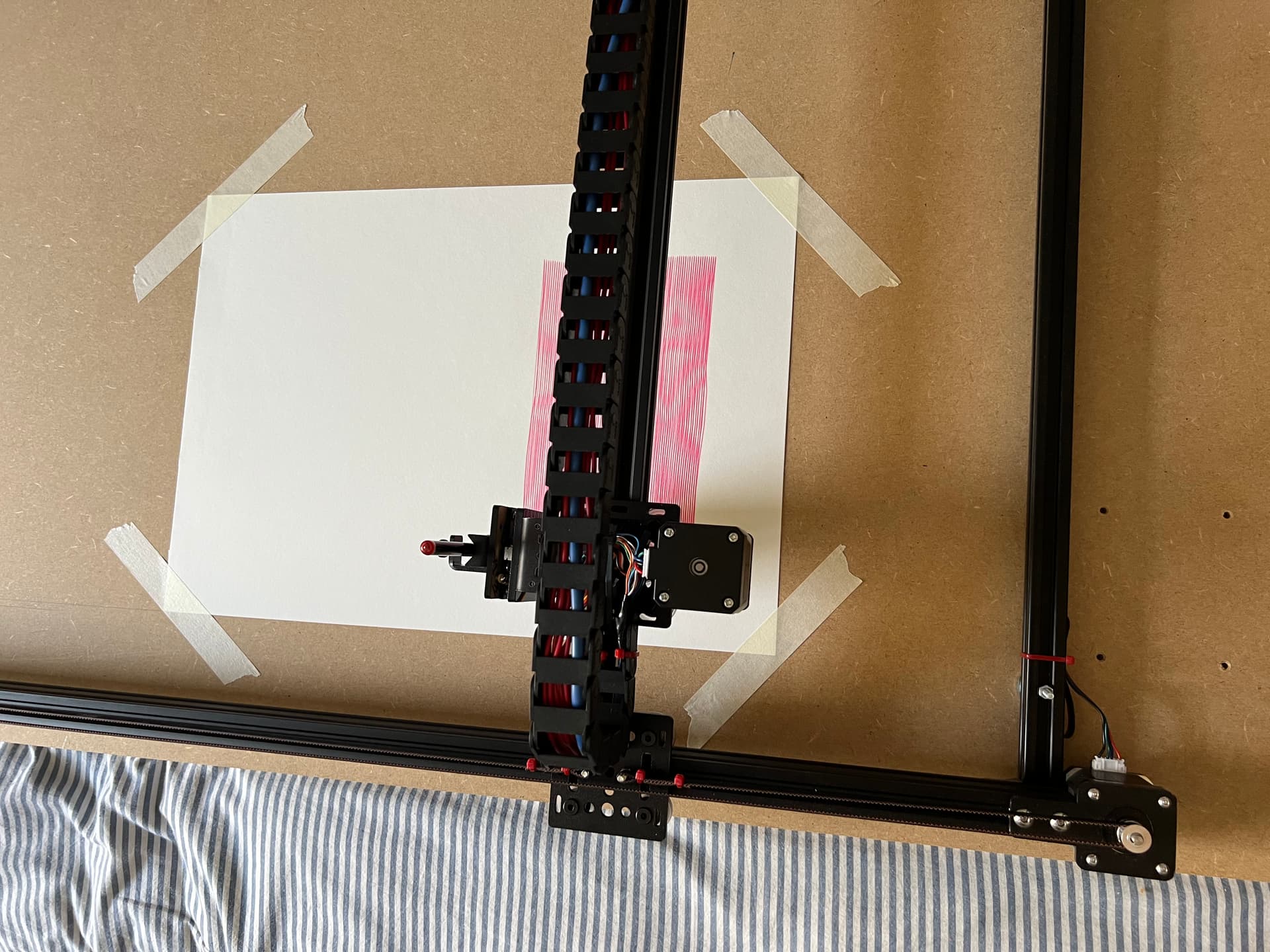
Thanks a lot man, I’ll check it as soon as I’ll have a chance. Btw I managed to configure everything, most of my issues were caused by a broken TMC2209 driver (uart not responding) but I was lucky enought to be able to control the machine with only two drivers. Anyway, I’ll attach my complete and corrected configuration on this thread ASAP. It is a pleasure to finally see it working )) You can check the video in the zip attached if you want to is it action. The camera was too close to capture the whole structure (1.5x1m)
Hi everyone. Just wanted so share some updates.
The machine seems to work correctly.
The temporary design is a dual Y axis stepper (with single drive cause… one of the TMC2209 drivers I have is not responding to UART - ordered 5 new drivers from AliExpress n.d.r.) and a single X axis stepper. The actuator for pen/pencil/other is a simple servo. I had to use ethernet cable to control the servo cause the cable length is huge (A0 size machine) and the noise coming from the cables of the X axis stepper were making a mess. I installed chain guides to have something reliable and also a fan on the stepper drivers cause they were becoming hot too fast, despite I’m using the CoolStep mode that it is supposed to reduce the currents.
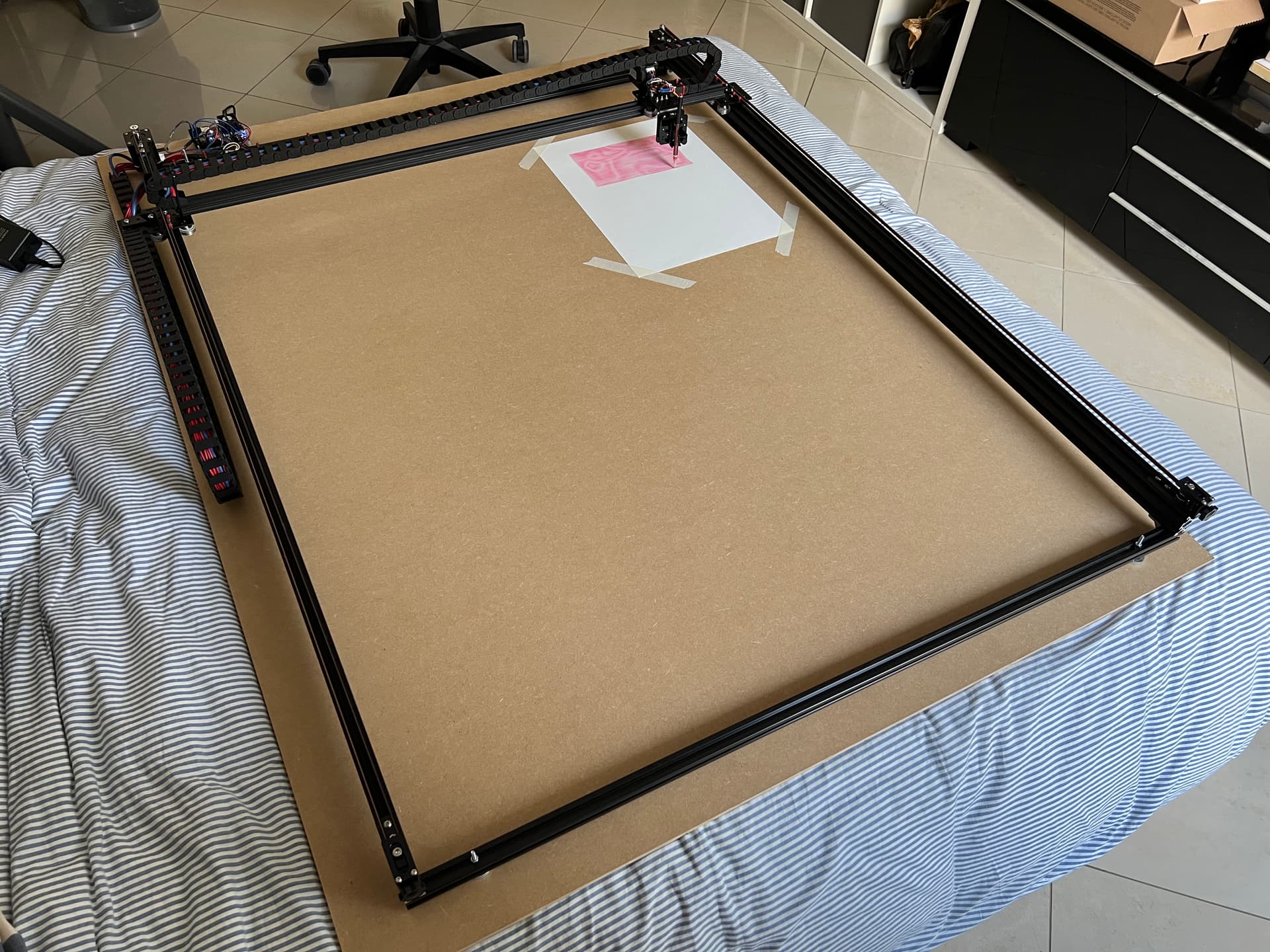
You can find some pictures of the machine attached and also the configuration that at this moment I’m using. The paper you see is size A3 and I have no space at home to place the beast, so it lies on my bed.
Future plans are to modify the MKS DLC32 in order to have UART mode enabled without jumpers, switching to a dual Y axis drivers and most importantly to make a pen holder from scratch and 3D print it. I have a heavy modified Anycubic i3 Mega that is more than capable for this.