Babyshark155
November 14, 2025, 5:08pm
21
yes it is. But I don’t trust any of what I had in the old uploaded yaml. Now EVERYTHING works except rotation. What should I change?
Yes I have completely laid down flat in the dust, and in the future I will stick to making 3d drawings and working WITH the machine. I don’t understand all that code.
Babyshark155
November 14, 2025, 5:16pm
23
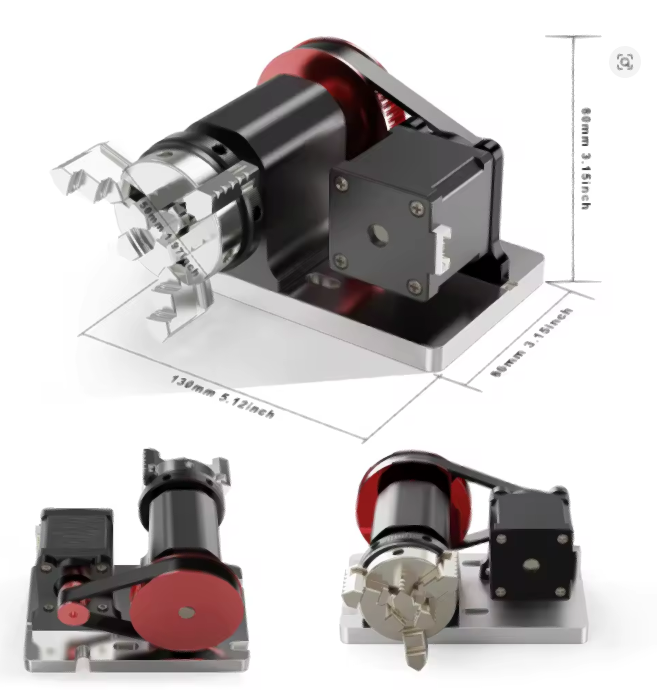
The rotating axis I have mounted is the one in the picture. It runs freely, the wires are plugged in. the driver is mounted. I don’t have the exact measurements you are looking for until tomorrow, as the wife requires attention the rest of the evening.
It was NOT purchased via this link, but from amazon.
:
Twotrees 4. Achse Rotationsmodul-Kit für ttc450/ttc 450 pro cnc Laser gravur maschine Rotations walze für zylindrische Objekt dosen - AliExpress 7
1 Like
Transcribing @Dreyfus config snippet here for reference:
#A
a:
steps_per_mm: 6.944
max_rate_mm_per_min: 20000
acceleration_mm_per_sec2: 500.00
max_travel_mm: 720.000
soft_limits: false
homing:
cycle: 0
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 600.000
seek_mm_per_min: 300.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 0.1
tmc_2209:
uart_num: 1
addr: 3
cs_pin: I2SO.22
r_sense_ohms: 0.110
run_amps: 0.50
hold_amps: 0.40
homing_amps: 0.40
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
[Reply from the original untranslated German
Macht nichts
1 Like
Britt
November 14, 2025, 5:24pm
25
I completely understand. When I was first trying to get my rotary working I made a copy of the working config and only edited the copy. That way if something went wrong I could go back to the working config.
I would add in the a axis to the copy and try it. If something doesn’t work we can modify it as needed. If all else fails, you can go back to the original config. Just don’t change the original working config.
Let us know how things are going when you get back to it.
4 Likes
Babyshark155
November 14, 2025, 5:27pm
26
So what you’re writing is that I can copy it and paste it into my yaml. (of course set steps_per_mm to match mine) and then it should work?
Babyshark155
November 14, 2025, 5:30pm
27
Yes, what you did was also the only right thing. I ended up overwriting it by mistake. (WON’T HAPPEN AGAIN) The working version is stored on its own USB stick that hangs by my spare keys.
1 Like
Britt
November 14, 2025, 6:05pm
28
That depends on what program you use. It needs to be a simple text editor that doesn’t have any formatting.
You need to check the spacing on each line to make sure it is correct. 1 extra space will ruin it.
2 Likes
Jonathjon
November 14, 2025, 6:11pm
29
Notepad++ is what most of us use
2 Likes
Jonathjon
November 14, 2025, 6:19pm
31
Jason Yeager:
I’m on Team VS Code.
And that is why I said “most” not “all”
1 Like
dos
November 14, 2025, 6:32pm
32
Note that the config that @MakerJim posted is correct at a glance, but you have to watch that you connect the rotary axis to the correct stepper header. Despite the posted config being labelled “#A ” (which is just a label comment, unlike “a:” which is the axis name), you actually have to connect the rotary axis to the stepper labelled “C” on the Jackpot board (as the stepper driver addresses for C are used in this config).
I note that the symptoms in your first post, @Babyshark155 , indicated that you simply had the Y1 and A0 steppers connections swapped. Swapping these connections probably would have got you running. You’re using a more standard config now, though, so good progress anyway. Just make sure that you plug your rotary axis into the “C” position on the Jackpot, even though your software will refer to it as “A”.
5 Likes
Babyshark155
November 14, 2025, 6:34pm
33
Since I have trouble learning to write and understand code, and have tried to through multiple different programs, I finally learned to use Notepad++. This program seems so simple that even I can use it.
However, I will upload the requested belt pulley measurements tomorrow when I have tested if it works.
3 Likes
Babyshark155
November 14, 2025, 11:58pm
34
Well, the wife fell asleep, so I snuck into the office to find the dimensions.
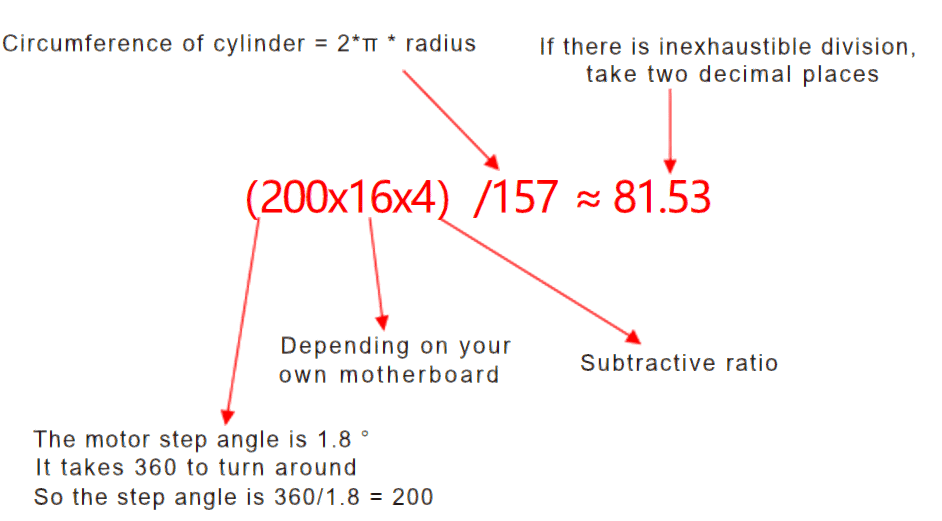
According to TwoTree’s own wiki, I can see that pulses of the motor is 200. (nema 17) The subtraction ratio is 4: 1 and the large pulley is 50 mm in diameter. (157 mm in circumference)
They provide information with the calculation shown
So according to the math should, steps_per_mm be (200x8x4) /157= 40.7643
But wouldn’t it actually be better to use 16 microsteps across everything?
1 Like
Babyshark155
November 15, 2025, 10:07am
35
well it didn’t work… Here are today’s error codes after the rotation axis was added:
$SShttps://github.com/bdring/FluidNC ]http://fluidnc.local/ ]
Wittiko
November 15, 2025, 10:13am
36
We’ll need to see the edited file, as a code block or someone who’s more familiar with yaml.
It’s somehow ignoring a key “a” and then a lot after it because the indentation is wrong.
The “a” is probably indented wrong already.
1 Like
Jonathjon
November 15, 2025, 12:29pm
37
as @Wittiko said. Upload your config.yaml and we will help you out. The A axis should already be in the config just commented out. You should be able to just remove the comment and set your rotation and such.
Babyshark155
November 15, 2025, 1:09pm
38
board: Jackpot TMC2209
name: LowRider
meta: 10-31-2024 RyanZ
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 2
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50.000
max_rate_mm_per_min: 11000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1245
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 600.000
seek_mm_per_min: 2500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#X
motor0:
limit_neg_pin: gpio.39:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: I2SO.1
step_pin: I2SO.2
disable_pin: I2SO.0
y:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1500
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 600.000
seek_mm_per_min: 2500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#Y
motor0:
limit_neg_pin: gpio.33:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 1
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
#A
motor1:
limit_neg_pin: gpio.35:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 1800.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 130.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 3
feed_mm_per_min: 600.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.065
tmc_2209:
uart_num: 1
addr: 2
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
#B
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.19
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
# c:
# steps_per_mm: 80.000
# max_rate_mm_per_min: 5000.000
# acceleration_mm_per_sec2: 100.000
# max_travel_mm: 300.000
# soft_limits: false
# homing:
# cycle: 0
# positive_direction: true
# mpos_mm: 150.000
# feed_mm_per_min: 100.000
# seek_mm_per_min: 800.000
# settle_ms: 500
# seek_scaler: 1.100
# feed_scaler: 1.100
#
# motor0:
# limit_neg_pin: gpio.39:low
# limit_pos_pin: NO_PIN
# limit_all_pin: NO_PIN
# hard_limits: false
# pulloff_mm: 3.000
# tmc_2209:
# uart_num: 1
# addr: 3
# cs_pin: i2so.22
# r_sense_ohms: 0.110
# run_amps: .8
# homing_amps: 0.800
# hold_amps: 0.050
# microsteps: 16
# stallguard: 0
# stallguard_debug: false
# toff_disable: 0
# toff_stealthchop: 5
# toff_coolstep: 3
# run_mode: StealthChop
# homing_mode: StealthChop
# use_enable: false
# step_pin: I2SO.21
# direction_pin: I2SO.20
# disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
Laser:
pwm_hz: 5000
output_pin: gpio.27
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
tool_num: 0
speed_map: 0=0.000% 1000=100.000%
off_on_alarm: true
# pwm:
# pwm_hz: 5000
# direction_pin: gpio.26
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: false
# 5V out gpio.26/27
# VMot out gpoi.2/16
#A
a:
steps_per_mm: 40.7643
max_rate_mm_per_min: 20000
acceleration_mm_per_sec2: 500.00
max_travel_mm: 720.000
soft_limits: false
homing:
cycle: 0
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 600.000
seek_mm_per_min: 300.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 0.1
tmc_2209:
uart_num: 1
addr: 3
cs_pin: I2SO.22
r_sense_ohms: 0.110
run_amps: 0.8
hold_amps: 0.8
homing_amps: 0.8
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
Jonathjon
November 15, 2025, 1:25pm
39
Instead of adding the A: and all at the end, just uncomment everything above that’s C: And change the letter C to A
1 Like
Babyshark155
November 15, 2025, 1:48pm
40
Like this?:
board: Jackpot TMC2209
name: LowRider
meta: 10-31-2024 RyanZ
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 2
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50.000
max_rate_mm_per_min: 11000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1245
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 600.000
seek_mm_per_min: 2500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#X
motor0:
limit_neg_pin: gpio.39:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: I2SO.1
step_pin: I2SO.2
disable_pin: I2SO.0
y:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1500
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 600.000
seek_mm_per_min: 2500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#Y
motor0:
limit_neg_pin: gpio.33:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 1
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
#A
motor1:
limit_neg_pin: gpio.35:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 1800.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 130.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 3
feed_mm_per_min: 600.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.065
tmc_2209:
uart_num: 1
addr: 2
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
#B
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.19
r_sense_ohms: 0.110
run_amps: 1
homing_amps: 1
hold_amps: 1
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
a:
steps_per_mm: 40.7643
max_rate_mm_per_min: 5000.000
acceleration_mm_per_sec2: 100.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 0
positive_direction: true
mpos_mm: 150.000
feed_mm_per_min: 100.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: gpio.39:low
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 3.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.22
r_sense_ohms: 0.110
run_amps: .8
homing_amps: 0.800
hold_amps: 0.050
microsteps: 16
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
Laser:
pwm_hz: 5000
output_pin: gpio.27
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
tool_num: 0
speed_map: 0=0.000% 1000=100.000%
off_on_alarm: true
# pwm:
# pwm_hz: 5000
# direction_pin: gpio.26
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: false
# 5V out gpio.26/27
# VMot out gpoi.2/16
1 Like