First off, my apologies for not starting a new thread previously. I jumped the gun without reading the rules and deserved the “smackdown” I got for it!
I’ve been 3d printing for a long time but this is my first foray into CNC. My build is a brand new LRv4 with a Jackpot3. It’s not permanently mounted yet, but I’m doing some bench testing to be sure motors are turning the right way and everything is happy before buttoning up the control box. I’m using only the FluidNC UI with all the default settings.
X axis works perfectly. Y axis is not ready for full testing yet, as the belts aren’t strung up, but the motors turn fine. The Z axis, however, is exhibiting some strange behavior. I can jog the two axes up and down ok (most of the time, more later). Homing is where things fall apart. It works fine maybe 30% of the time. The rest of the times, one side stops mid sequence. The motor that stops appears to have lost power since I can rotate the Z screw by hand at that point. The only way I have been able to recover is to cycle power to the Jackpot. I switched the motor and end stop connections at the board, and the problem shows up on the opposite motor. You can see the action in this video:

I’ve checked extensively for binding or interferences and so far found none. I have also verified that the XZ plates are parallel and the X axis tubes are level. In this video you can see smooth motion through the Z axis range when jogging 10mm at a time. In this case, the Z motors and switches are plugged into to their normal connections. When I go to move 25mm, trouble starts. Downward motion is fine. When moving up, Z1 starts to have trouble, while Z0 moves normally. Z1 stops with a grinding noise. No error is thrown. A second25mm command and both motors move normally again, although they are no longer in sync. The grinding appears again on the third 25mm motion. Homing brings them back into sync this time. The rest of the video shows a repeat of the same issue.

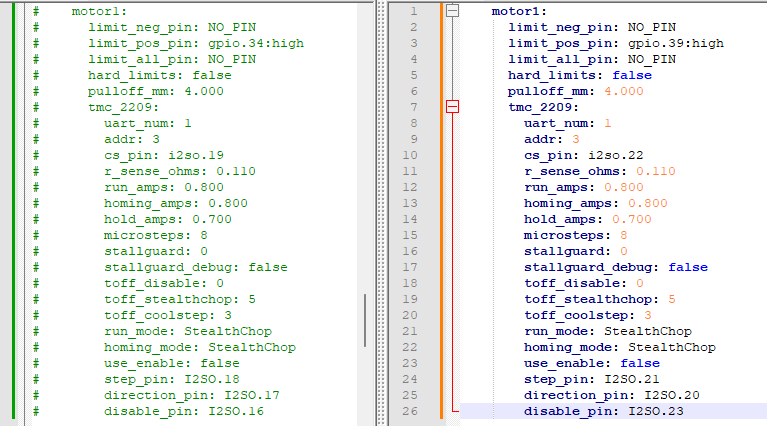
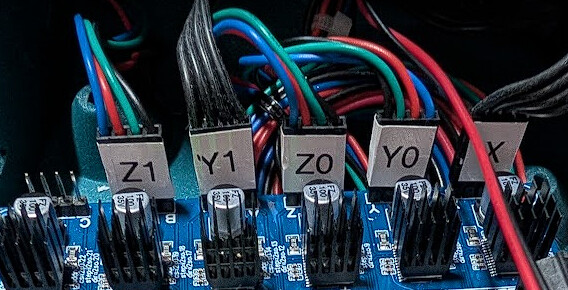
Again, I switched the Z connections, motors and end stops, at the board and the problem moved to the other side.

I will note that the Z tensioner screws are in place, but loose, in all but the last video (you can see them sitting on the table). I did go back and run all the same tests with them completely removed. The results were the same.
At the risk of influencing opinions, it seems to me that since the same problems move from one side to the other when swapping board connections, that indicates that the board itself has an issue. Everything else remained the same.
Any advice would be appreciated!