I think that’s a dangerous assumption to make without understanding what the code behind those methods actually do.
From a quick glance at the code, it looks like the method was maybe just renamed. Stepper::reset() clears the motion buffer and sets the motor to idle. I don’t think there was a functional change, and it doesn’t look like this is what kills the motors.
Again, these guys are not perfect, but generally they are pretty good. I would not assume that we are going to understand the scope of all of this by glancing at the code and making assumptions. Mitch will have to clarify.
I saw that method, but at a quick glance, it didn’t look like it was being called through the probe code.
The actual alarm is triggered on line 332 of the MotionControl.cpp, but nothing sticks out yet to me as to what causes the stepper disable. I’ve played in here a bit, but still struggle to read their code very well sometimes.
Interesting. I think I might have done that before and chalked it up to prerelease version.
I just ran out and tested the pendant probing. It works as expected with no motors disabling/ dropping on Alarm. I did notice I can hit retract multiple times until it runs into the Z hard limit switch though, so I won’t do that again.
There’s a lot of complex interactions going on in the code, and it seems like the behavior is maybe slightly unpredictable.
I’m wondering if maybe there is a bit of a race condition that is causing it to sometimes trigger while it thinks it’s still in motion, and sometimes the motion is considered complete, so it doesn’t???
Just to make sure, in the cases where there is no drop, can you try pushing on the gantry to make sure the motors are actually still enabled rather than just not dropping?
It would be a good idea to have some support blocks down below the X Rail for this test
I have a good grip on the gantry while I’m doing these tests to prevent it from totally free-falling, but I’ll double check by trying to spin the leadscrews. I’m curious to try the older “known good” 3.7.x and see if this is a regression bug. (Not really trying to solve any blocking issues at this point, just gathering information for fun.) “What do you do for fun?” “Crash giant cutting robots on purpose”
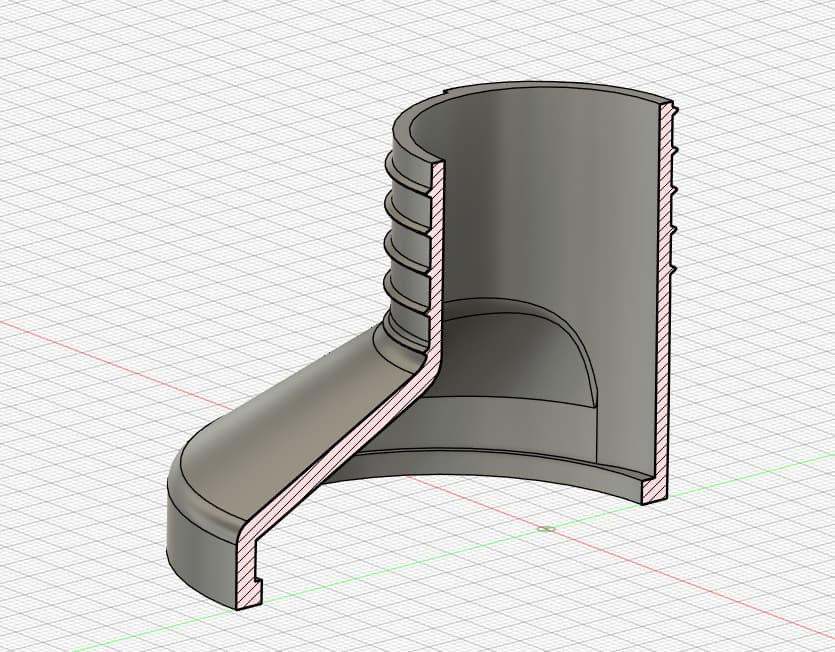
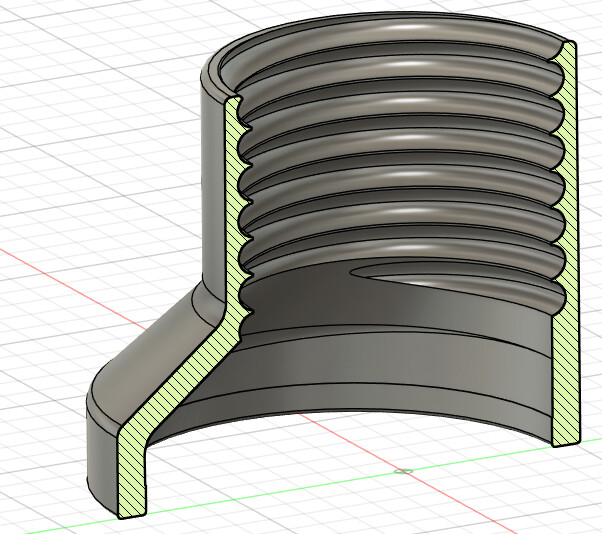
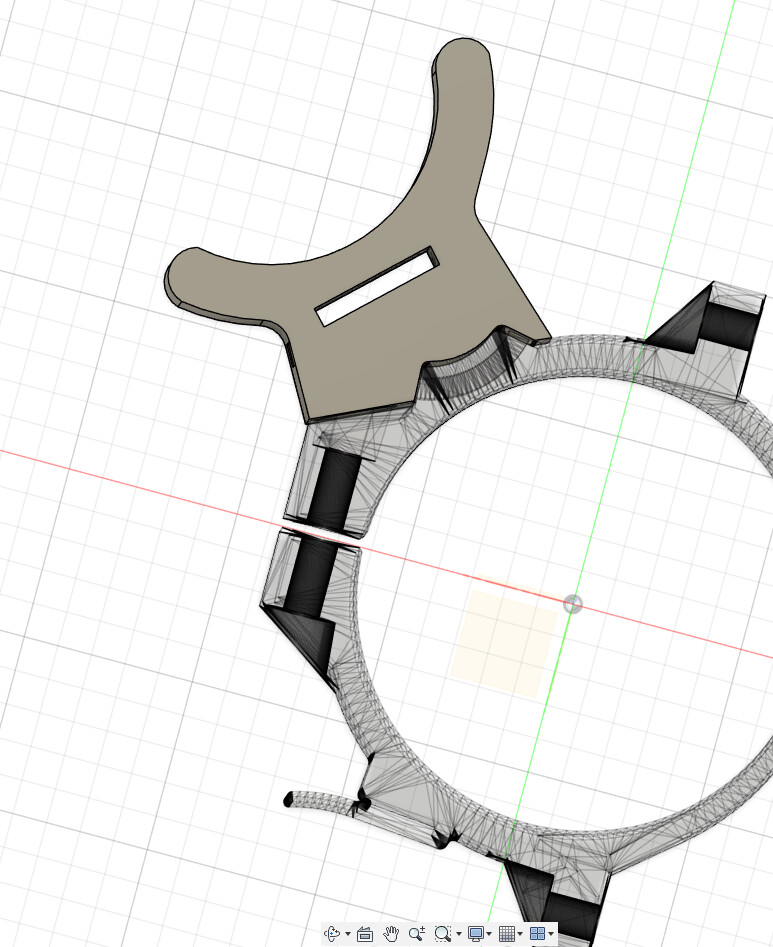
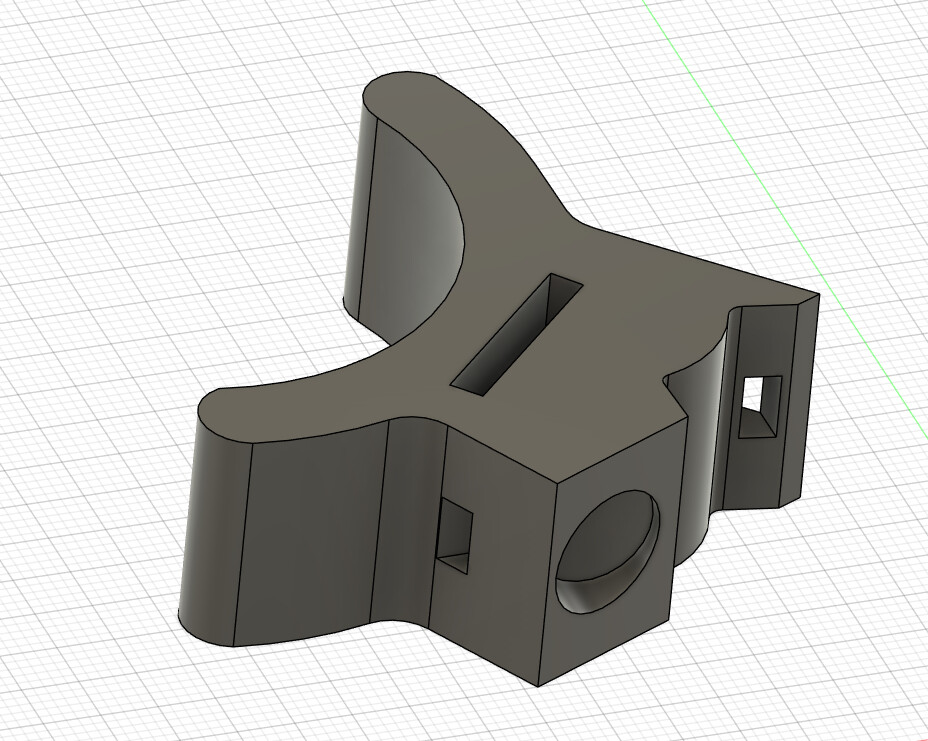
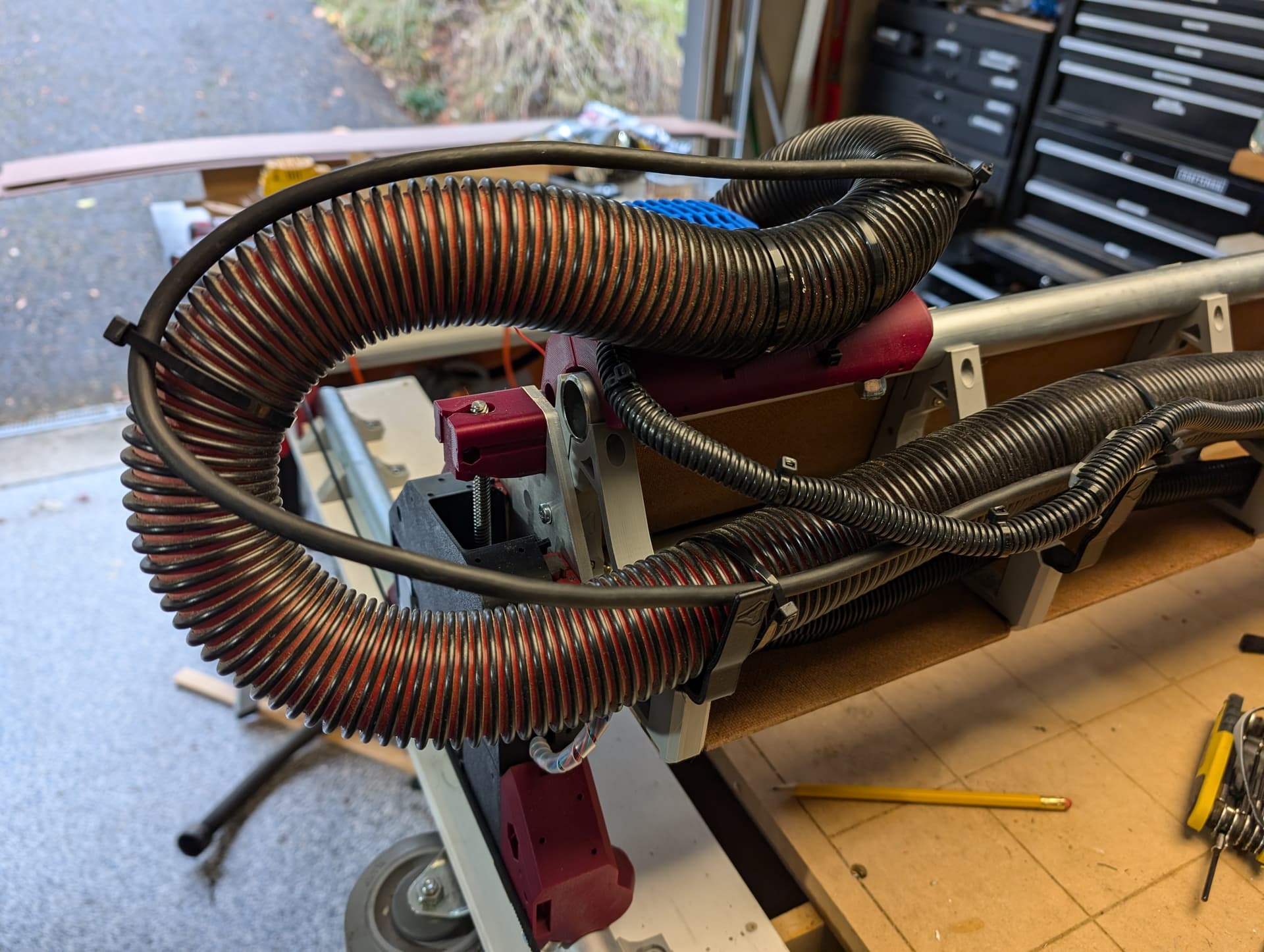
Testing a shop vac hose adaptor, offset so it’s close to the zip tie anchor. Will post it if it works, then on to cutting new strut plates with great enthusiasm!
(edit: I realized this morning that it would make more sense if the adaptor part went on the OUTSIDE of the hose, to get a few more mm of hose diameter, so will do that instead)
Ah, will experiment with it. If I can get it to bend correctly then that sounds perfect. I think I had quite a big loop for my LR3 until it was happy (also pictured: yardstick of dust collection)
I will likely just use a floppy 2.5" hose eventually, but figured I’d just make some crazy stuff for fun.
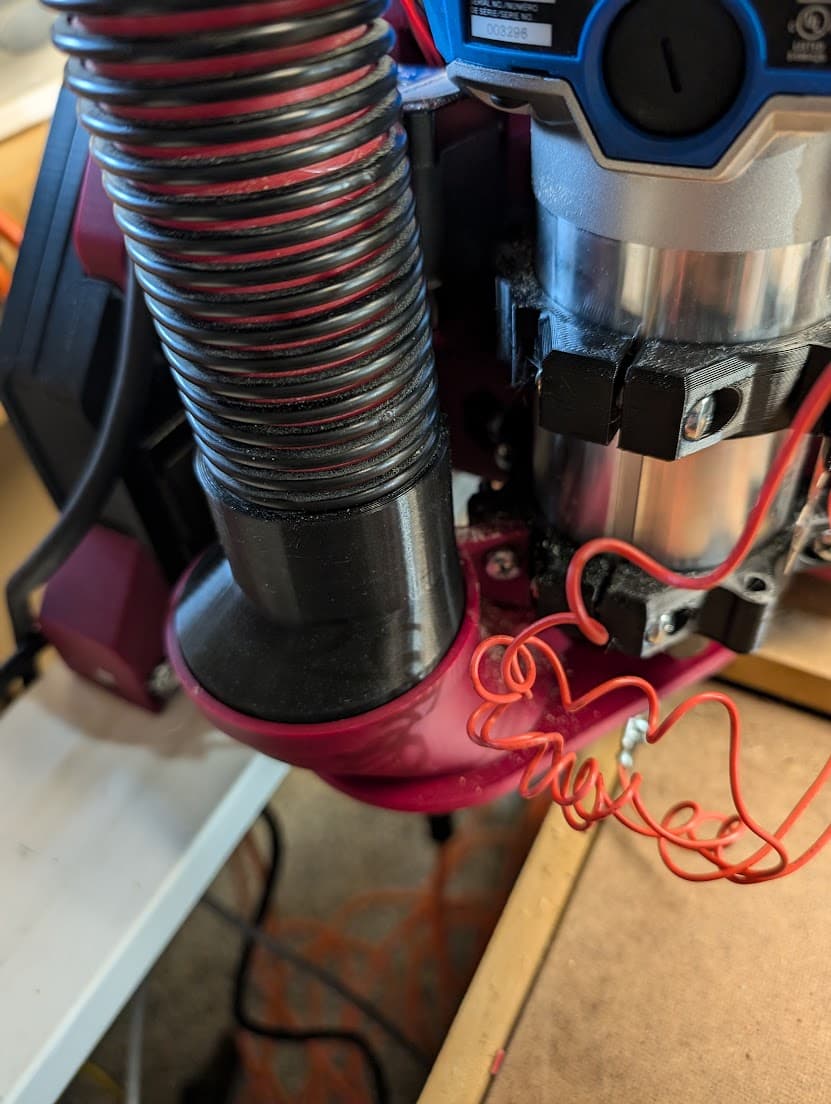
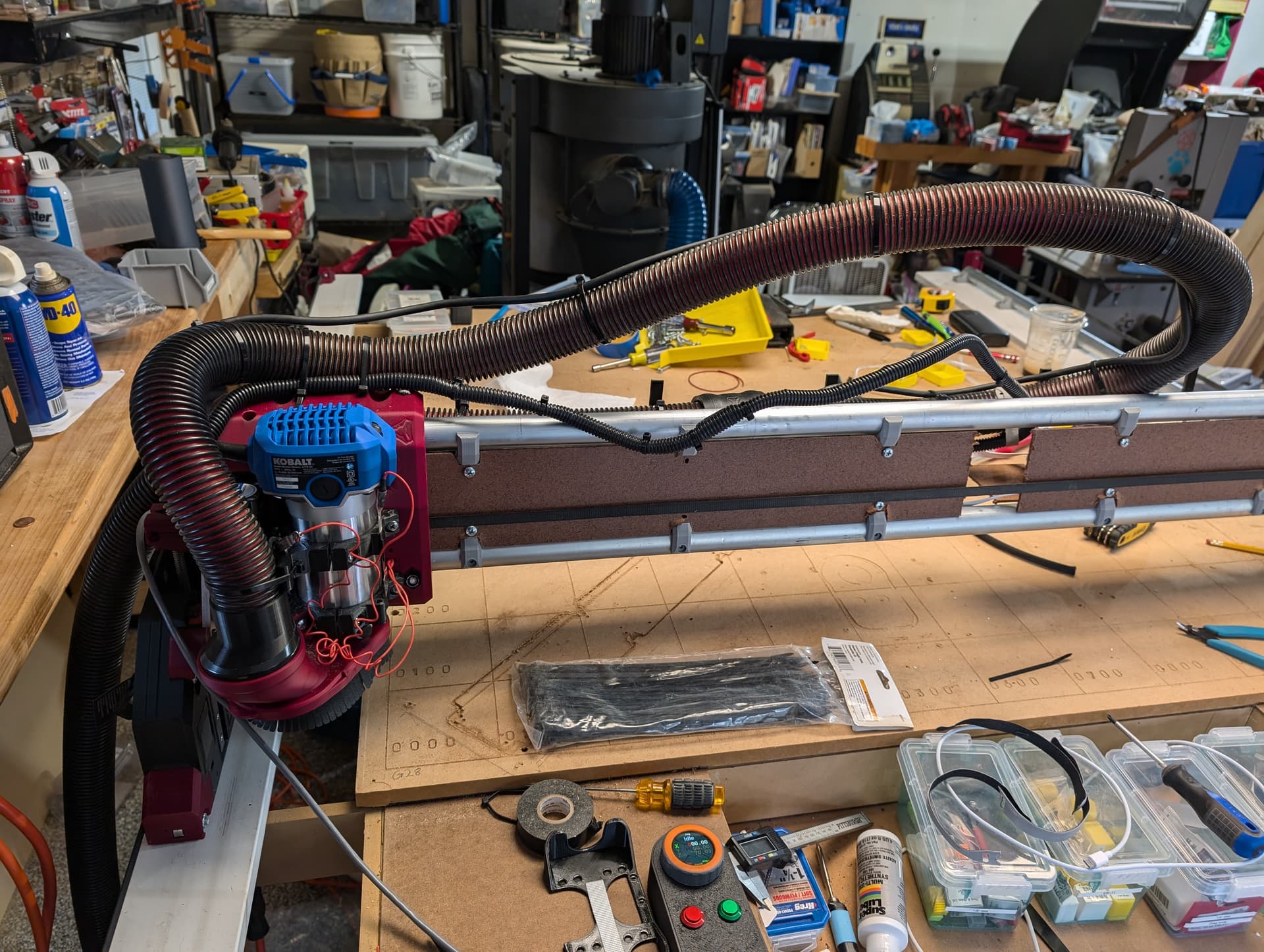
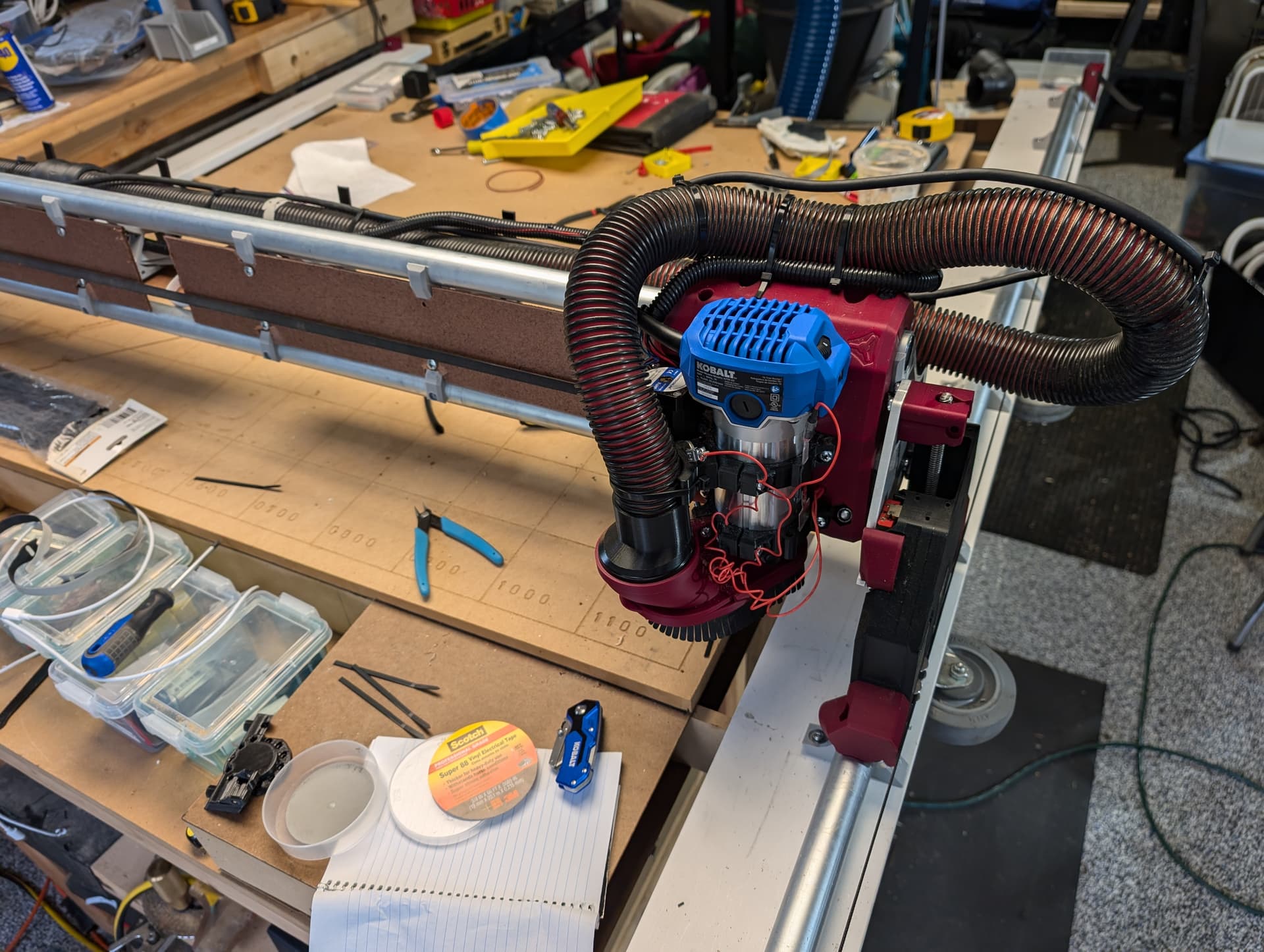
Dongle thingy hooked up to the snuffletrunk. Now to secure the hose and the wires things to the handy Core zip tie holes, in a way that allows smooth X travel…
(the slot is a place to shove my disc magnet, which I use with the alligator clip end o’ the probe)
I’ll post the stl’s of my vac hose and spacer, if anyone wants them (before the official vac hose adapter is released.) If it’s not clear, this is SPECIFICALLY for the older 1.5" LR3 hose that Ryan linked: Amazon.com (I have a longer one I got at the hardware store)
OK, after jogging back and forth a few million times, I think I have the cords and hose configured in a way that minimizes drag, avoids snagging, wires remain slack, and is compact. The key was making sure I had enough hose at full X extension.
Hopefully static isn’t an issue, I didn’t run a wire as mentioned in the docs, but I didn’t have a problem with problem with the lr3, so will keep a close eye on it.
Now to clean up my build mess, final squaring, and hopefully dust will fly this weekend!
In the instructions I mention not plugging in the Z axis and doing this unpowered.The trick is getting the right twist in the hose after the right amount of hose.
If you did not ground your vac hose it will 100% be a problem. Ranging from random reboots to frying your control board.
I think it worked pretty well with jogging X, I think I spent most time just making sure the wires didn’t get snagged or tight (would have been easy if they were all the same length as the hose) but good to know about the suggested Unpowered workflow, I kinda skipped ahead when I didn’t have a hose solution at the time (2.5" I got was too short, didn’t have a 1.5" adapter.) With the rigid hose it was pretty “obvious” when I had the right twist.