I had most of the parts ordered and printed upfront. It took 2-3 weeks to print the parts and receive everything from all the online shops. I spent something like 470 EUR for the parts excluding the steppers, as I used the ones I had from my previous cnc.
The parts are designed very nicely and I really enjoyed printing them. Some overhangs were a little bit on the steepish side and I couldn’t get them to print nicely, even going at slow print speeds. But overall the design is still great.
Generally the build is going according to the docs. We went to the country for the weekend and I found some 20-year-old black wood stain and gave it a try The paint looked like jelly, but I was quite happy with the result in the end.
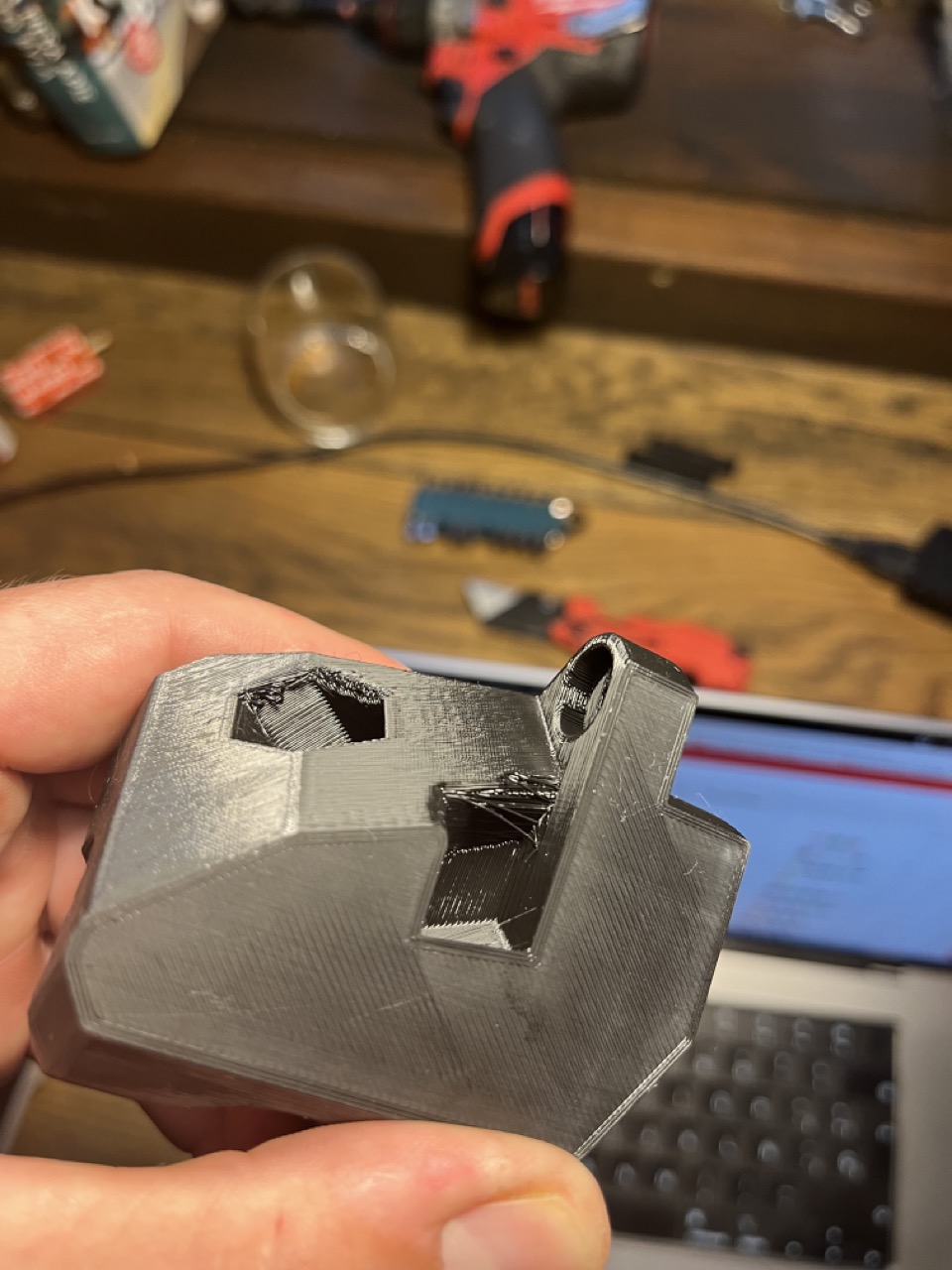
I made a mistake when slicing the XZ stubs and printed them at 40% infill instead of 70%. This could be the reason why the holes were a little bit too big for m3 screws.
Also I am not sure why one of them stubs has 2 holes for the screws and the other one has only 1. Maybe I will find out later on
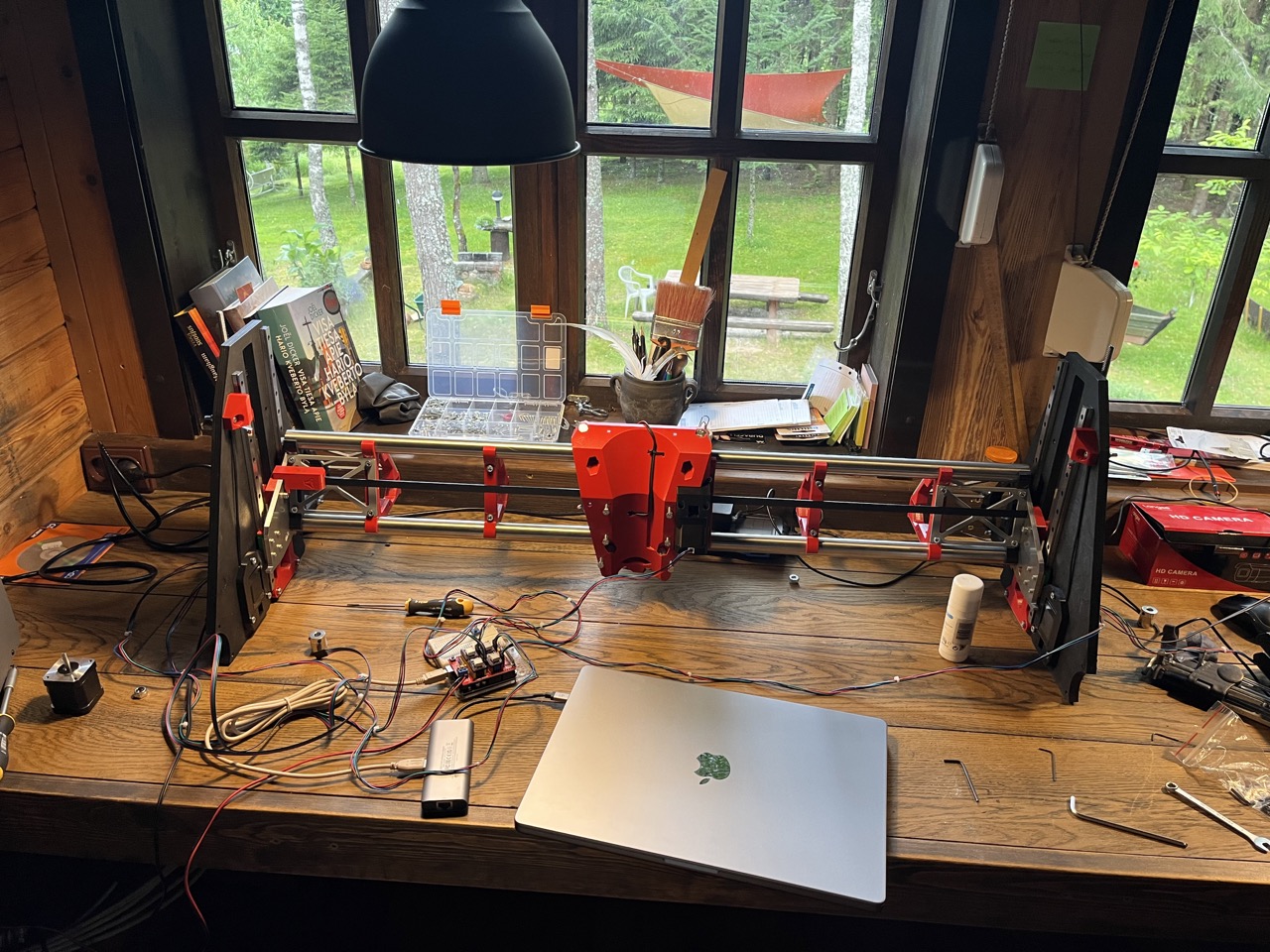
It took a while to align the long rails properly. I had to loosen and tighten the screws a few times to get it right. At the moment it seems very smooth.
I’m doing it for milling foam so I don’t expect much load no Most of the times I will only need to mill 10-11 cm deep, but I decided to use the tallest plates “just in case”. In theory it should be even more stable than the regular plates at the bottom because the base is wider.
Made some progress with the build, the beam is assembled and fixed to the side plates. SKR PRO board is still in the mail, so I connected an old arduino duemilanove with a CNC shield to the stepper motors just to see if things are moving as they should.
There was some vibration / backlash on one of the leadscrews, but playing around with the motor couplers seems to have fixed the problem.
One thing I don’t like is that the leadscrews rotate super easily and even the slightest vibration (or sometimes just touching the beam with my hand) will cause the beam to drop down when the steppers are not engaged. Probably not a huge deal since LR3 has auto-level feature, but still kinda weird. With the added weight of the motor, I think it will keep dropping all the time without even touching it. On the bright side, this probably also means I aligned the Z rails pretty well
@karolis, seen this thread Nema17 torque question - #15 by jeffeb3 ? Some folks use different lead of thread from the default 8mm, sacrificing Z speed for increased force that also comes with reduced free motion when steppers not engaged.
Thanks for the tip @aaronse, no I haven’t seen that thread before. It is difficult to say whether it would be beneficial for me to use 1 start / 2 start threads, as I still don’t know what Z speed I will need in the end. Since I’m milling large blocks of soft material, I plan to run x/y planes fast (even considered using 20T instead of 16T pulleys), but Z speed is probably not so critical.
I was also wondering whether spring-loaded anti-backlash nuts would increase the friction a bit and prevent the spindle from crashing.
I don’t have any issues when the motors are powered, the problem is that the beam is almost free falling when the motors are powered off.
The steppers are 59Ncm. The drivers are 2.5A if I am not mistaken and I adjusted the potentiometers with a multimeter, don’t remember exact values as it was a while ago when I was building another cnc.
My mistake. That is to be expected. I end my jobs at Z positive steppers stay powered (with a pause at the end so they do not power off), to clear the workpiece and have a gcode saved on the card called “park”. It homes to ZMAX, Then X and Y, after that it drives down to Z min and powers down. So it is parking the head at Z min and it has no dropping left to do. You can do all that in your ending G code, but I prefer to have the safety of my working coordinates being saved in case I made a mistake and need to rework anything on a project and gives me time to clear the parking spot if needed.
These add friction all the time though. So it can make lifting the router harder (which can lead to skipping steps).
A 1-start leadscrew and a 24V PSU (more voltage increases the top speed) is a decent alternative. But parking at a spot where it doesn’t matter is free.
That is another question I had for a while: why does v1 engineering recommend 12V power supplies, when most of the stepper motors perform better with 24V or higher voltage?
24V cost more and our use case does not benefit from them. The only thing we lose out on a bit is super fast travel moves. I do not like slinging a router around any faster than we currently do.
Because it’s enough. Also, I’ve never seen Ryan say NOT to use 24V, but the power supplies that he sells in his kits are 12V, and it’s enough. That’s not the weak point of the machine or the electronics at the intended use case and speeds.
I don’t think that Ryan is a fan of “overkill” – Most engineers that I know aren’t. They tend to like proper balance of design, but common points of failure should be easy to diagnose and change out.
12V power supplies are both.
24V does provide better high speed performance, and I use them, because I have several already. But at the speeds where I use my machine, there is no measurable benefit. I did some “weight lifting” with my LR2 with a 12V supply and a 24V supply, and the results were that the motors are just as capable (at 180mm/min) of lifting weight with a 12V supply as with a 24V supply. It was after about 600mm/min that I started seeing the 24V make a difference in the amount of weight that the LR2 could lift.
I remember Ryan saying that the price difference is minimal, and that he’d switch if there was any reason to do so, but so far, the only performance gain is rapid movement.
This is important on a 3Dprinter, which often moves at fairly high speed while in use.
Looks like it is time to do some sort of controlled testing about this. Keeping the current fixed (same amount of heat to dissipate), and then vary the load (static and dynamic), and top speed.
I will start a topic in the Random section to gather some ideas.
C’mon guys, with lawn mowers pushing 60+V, it’s time we kept up with Tim The Toolman Taylor, and started applying the “more power” principal. What’s wrong with a router slinging around at 5,000 IPM?
Speaking of which I wonder how long it will be until someone gets electrocuted by their lawn mower…


 The paint looked like jelly, but I was quite happy with the result in the end.
The paint looked like jelly, but I was quite happy with the result in the end.