Hi Doug,
Thanks for the detailed procedure. In the time since you have posted it, the official V1 file has been updated to https://github.com/V1EngineeringInc/MarlinBuilder/releases/download/515/V1CNC_SkrPro_DualLR_2209-2.1.1.zip, and the newer version of Marlin uses somewhat different syntax.
I (think that I) have found the correct way to accomplish this in the newer release.
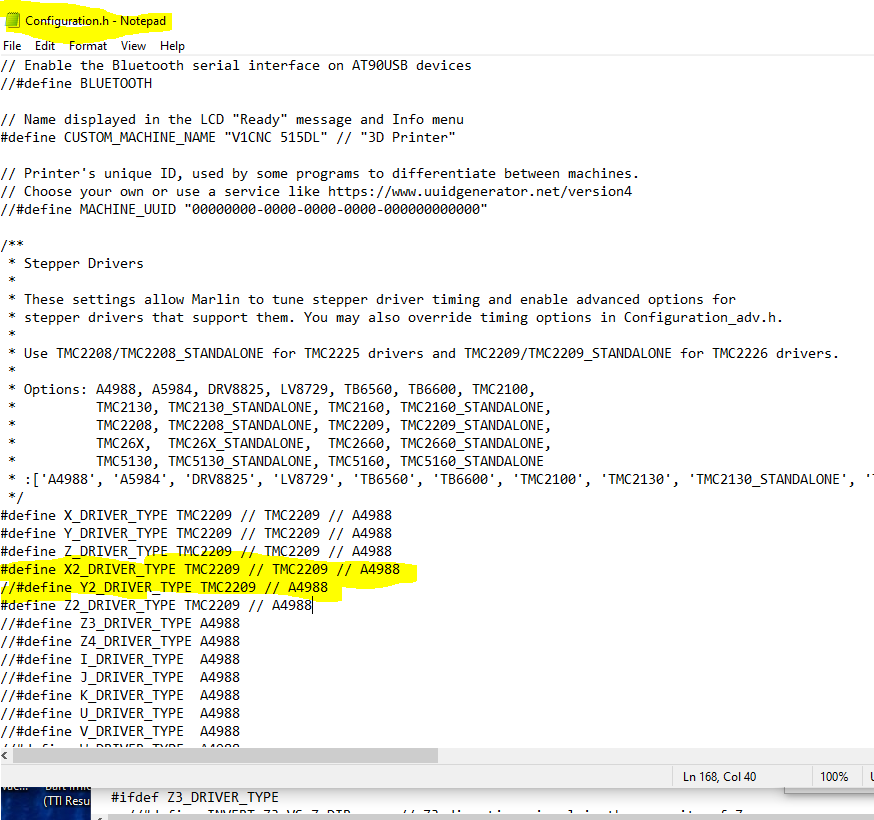
In configuration.h:
- Uncomment #define X2_DRIVER_TYPE, and edit to match the correct driver type (same as X, Y, Z, Y2)
- Comment out #define Y2_DRIVER_TYPE
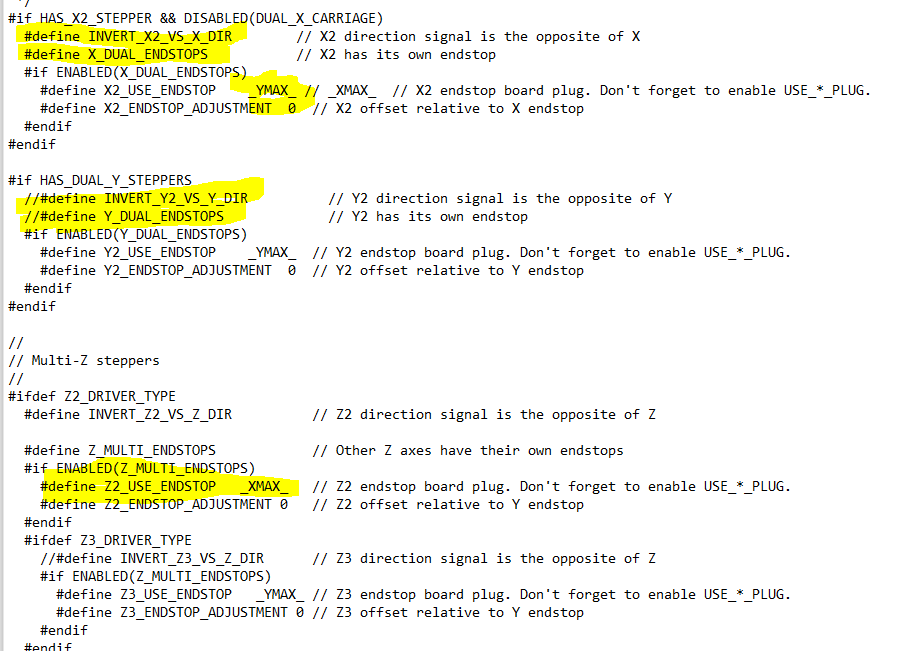
In configuration.adv.h:
- Uncomment #define INVERT_X2_VS_X_DIR
- Uncomment #define X_DUAL_ENDSTOPS
You shouldn’t need to do the next two items because of the IF statement, but I did them anyway - Comment out #define INVERT_Y2_VS_Y_DIR
- Comment out #define Y_DUAL_ENDSTOPS
- EDIT - Must also change #define X2_USE_ENDSTOP _ XMAX_ to X2_USE_ENDSTOP _ YMAX_
(Note that endstop X_MAX is already in use by Z2 endstop)
The above changes should change the E0 driver and endstop ports to be X2 instead of Y2. Wire accordingly.
Edit - tested this and it works, but you must also change the X2 endstop to use YMAX (see note above).