Hello. Got everything built out and wanted to test a single stepper motor before advancing, but got stuck. Below are the components and steps I took to test things out. Not sure if I am missing a step or what but I’ve tried every combination for the motors. I did have them working with an Arduino/CNC Shield for a XY Plotter if that helps any.
Thanks, this solved my motor not moving issue. But now I cannot get both x or y motors to move together. Does it go X1 Y1 Z1 Z2 X2 Y2 from left (starting on side with usb) to right (side with power)? Or do they need to split off X1 and Y1?
You have to edit the config_adv to enable Dual endstops. I just popped a board trying to figure this out, probing for signals. I have one left, hopefully I figure this out soon.
I was able to get the 2 X steppers working, but when I went to do the same for Y I got the error saying something like there wasnt enough E slots available. Not sure if this is going to help but I went tot he pins_Archim1.h file and added the lines below replacing what was there for E0 and E1. Should this work without breaking anything if it compiles?
Is it a general problem with the firmware on Github?
I am having a similar problem with the following setup:
Arduino Mega 2560
Ramps 1.6 with DRV8825 drivers
Wantai 42BYGHW811-X1 2.5A stepper motors
Full graphics LCD display
Marlin-MPCNC_Ramps_T8_16T_LCD_32step firmware
I can feel the heatsink on the drivers getting hot when trying to move axis through the UI, but I only get a high pitched noise from the stepper motors, but no movement.
Yes, they all make noise depending on what part of the sine wave it is being held at. Have a look at the singing 3D printer videos if you want reassurance.
I ordered my stepper motors with connectors and mating cables.
I had a spare stepper motor from the same company (Wantai), identical model (42BYGHW811) that I had been using for another project with a Arduino UNO and a stepper motor shield.
I wanted to test the new motors in the same setup and wired them directly to the motor shield using male-male Dupont connectors.
Same result as with the MPCNC setup: The motors just stuttering and no turning.
I noticed that the colors of the wires were identical on the spare motor as well as the MPCNC motors, so I re-arranged the wires to match the spare motor - and sure enough, the motors now turned as they should.
Back to my dry-run MPCNC-style, I can now turn the stepper motors using the UI. SUCCESS.
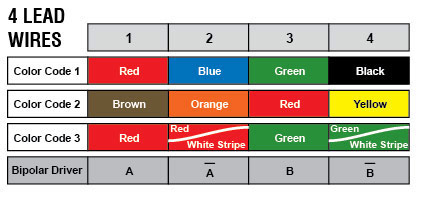
Grats! I’ve been in the “industry” for many years and I’m still learning (good thing?). I didn’t realize that there was a “standard” color code for stepper motors. Do your Wantai motors follow one of the color patterns in the attachment? Most of us use bi-polar (4 wire steppers) I’m guessing. Good for future reference if/when someone encounters this issue.
Yep. Looks like I jumped the gun, upon further searching - it varies quite a bit between manufacturers, which I thought was the case originally. I’ve purchased steppers in the past and most come with a magic decoder ring that tell you which wires are which.
At least we know another thing to look for next time a builder has a stepper motor problem.