What have you got in your config for the rotary axis?
This is for the A axis. Lightburn uses it.
a:
steps_per_mm: 6.944
max_rate_mm_per_min: 20000
acceleration_mm_per_sec2: 500.00
max_travel_mm: 720.000
soft_limits: false
homing:
cycle: 0
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 600.000
seek_mm_per_min: 300.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 0.1
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.110
run_amps: 0.50
hold_amps: 0.40
homing_amps: 0.40
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
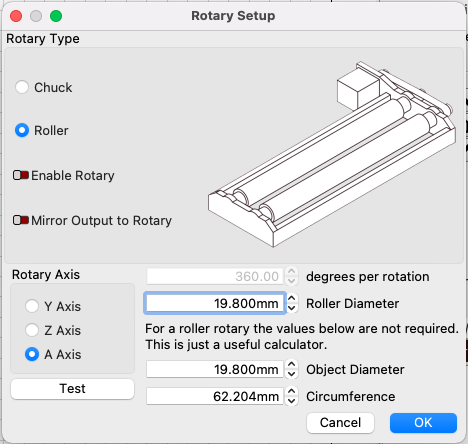
Lightburn rotary settings:
1 Like
Hmm, how’s that work on a lowrider where a is the Y1 driver - if you enable rotary does it know to disable y0?
Edit: this is all getting off topic, sorry Ryan.
A is just the silkscreen on the board, no more. Y1 is just whatever driver coordinates (address #, etc.) that are configured for motor1 under Y: in the config.yaml.
My A axis is actually mapped to a gpio pin for a servo.
1 Like
I changed my X1 driver to C on my MPCNC. It should work the same for you to change your Y1 driver to C.
Should we start a new thread @vicious1 ?
1 Like
Thanks boss.
I have a 6th tmc2209 driver on the way - once it arrives I’ll put it in the remaining slot.
So I’ll need to define that slot -silkscreened as C - as slot A in my config then.
I tried that initially and it didn’t work so I swapped C and A in the config. I can post one for you to look at and try out if you want.
@dos do you use Lightburn with a rotary plugged in to C?
Yes please that’d be great
1 Like
Yes, but defined as A in the config.
1 Like
If we can come up with a succinct to explanation of all this it’d be good reference for anyone else trying.
Then someone smarter than me could make an online yaml builder that adds/comments out the relevant sections based on user form inputs:
Laser fitted: tick
Rotary axis: tick
2 Likes
Here is the config with A-rotary and C- Y motor 1.
config-LR4RotaryA.yaml.zip (2.2 KB)
These are my motor definitions for A and C. Would you please look at them and tell me how they compare to yours?
A: (rotary)
#A
a:
steps_per_mm: 6.944
max_rate_mm_per_min: 20000
acceleration_mm_per_sec2: 500.00
max_travel_mm: 720.000
soft_limits: false
homing:
cycle: 0
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 600.000
seek_mm_per_min: 300.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 0.1
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.110
run_amps: 0.50
hold_amps: 0.40
homing_amps: 0.40
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
C (Y motor 1)
#C
motor1:
limit_neg_pin: gpio.35:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.22
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
Will do. Poke me if I don’t within a week. I’m currently 400KM from home.
1 Like
Driver is here and I’ve put into the remaining slot - C on the board.
[MSG:ERR: A Axis TMC driver not detected - expected 0x21 got 0x0]
Any ideas?
$ss
[MSG:INFO: FluidNC v3.9.5 https://github.com/bdring/FluidNC]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.7-dirty]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config-PL.yaml]
[MSG:INFO: Machine LowRider]
[MSG:INFO: Board Jackpot TMC2209]
[MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
[MSG:INFO: UART2 Tx:gpio.15 Rx:gpio.12 RTS:NO_PIN Baud:115200]
[MSG:INFO: uart_channel2 created at report interval: 75]
[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21Min Pulse:2us]
[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
[MSG:INFO: Stepping:I2S_STATIC Pulse:2us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
[MSG:INFO: Axis count 4]
[MSG:INFO: Axis X (3.000,1263.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
[MSG:INFO: X Neg Limit gpio.25]
[MSG:INFO: Axis Y (3.000,2483.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
[MSG:INFO: Y Neg Limit gpio.33]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
[MSG:INFO: Y2 Neg Limit gpio.35]
[MSG:INFO: Axis Z (-297.000,3.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110]
[MSG:INFO: Z Pos Limit gpio.32]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
[MSG:INFO: Z2 Pos Limit gpio.34]
[MSG:INFO: Axis A (-720.000,0.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.22 Step:I2SO.21 Dir:I2SO.20 Disable:I2SO.23 R:0.110]
[MSG:INFO: X Axis driver test passed]
[MSG:INFO: Y Axis driver test passed]
[MSG:INFO: Y2 Axis driver test passed]
[MSG:INFO: Z Axis driver test passed]
[MSG:INFO: Z2 Axis driver test passed]
[MSG:ERR: A Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: Connecting to STA SSID:xxxxxxxxx]
[MSG:INFO: Connecting.]
[MSG:INFO: Connecting..]
[MSG:INFO: Connected - IP is xxxxxxxxxxx]
[MSG:INFO: WiFi on]
[MSG:INFO: Start mDNS with hostname:http://fluidnc.local/]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
[MSG:INFO: Laser Ena:NO_PIN Out:gpio.26 Freq:5000Hz Period:8191]
[MSG:INFO: Flood coolant gpio.2]
[MSG:INFO: Mist coolant gpio.16]
[MSG:INFO: Probe gpio.36:low]
ok
![]()
Heres my yaml for A:
#A
a:
steps_per_mm: 6.944
max_rate_mm_per_min: 20000
acceleration_mm_per_sec2: 500.00
max_travel_mm: 720.000
soft_limits: false
homing:
cycle: 0
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 600.000
seek_mm_per_min: 300.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 0.1
tmc_2209:
uart_num: 1
addr: 3
cs_pin: I2SO.22
r_sense_ohms: 0.110
run_amps: 0.50
hold_amps: 0.40
homing_amps: 0.40
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23


Bummer! I hope it wasn’t very much.
Nah, just annoying. Ordered another but it’ll not be here till the weekend.
I had a 2208 in my parts bin somehow (I have no idea how it got there; I only order 2209s at this point.). Kicked my butt for days before I found it. You got it rather quickly ![]()
1 Like
Perfect example of the 3 golden rules of troubleshooting:
Don’t trust anything
(how do I know the driver itself isn’t faulty)
Try the easiest thing first
(Put it in a known good configured slot - still doesn’t work)
It’s probably user error
(Ordered the wrong one)
1 Like
Progress. the new stepper arrived, installed and now:
[MSG:INFO: A Axis driver test passed]
I tried enabling rotary mode in lightburn and using the Test button and the Stepper just shuddered, so somethings not quite right but getting closer
$ss
[MSG:INFO: FluidNC v3.9.5 https://github.com/bdring/FluidNC]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.7-dirty]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config-PL.yaml]
[MSG:INFO: Machine LowRider]
[MSG:INFO: Board Jackpot TMC2209]
[MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
[MSG:INFO: UART2 Tx:gpio.15 Rx:gpio.12 RTS:NO_PIN Baud:115200]
[MSG:INFO: uart_channel2 created at report interval: 75]
[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21Min Pulse:2us]
[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
[MSG:INFO: Stepping:I2S_STATIC Pulse:2us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
[MSG:INFO: Axis count 4]
[MSG:INFO: Axis X (3.000,1263.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
[MSG:INFO: X Neg Limit gpio.25]
[MSG:INFO: Axis Y (3.000,2483.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
[MSG:INFO: Y Neg Limit gpio.33]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
[MSG:INFO: Y2 Neg Limit gpio.35]
[MSG:INFO: Axis Z (-297.000,3.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110]
[MSG:INFO: Z Pos Limit gpio.32]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
[MSG:INFO: Z2 Pos Limit gpio.34]
[MSG:INFO: Axis A (-720.000,0.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.22 Step:I2SO.21 Dir:I2SO.20 Disable:I2SO.23 R:0.110]
[MSG:INFO: X Axis driver test passed]
[MSG:INFO: Y Axis driver test passed]
[MSG:INFO: Y2 Axis driver test passed]
[MSG:INFO: Z Axis driver test passed]
[MSG:INFO: Z2 Axis driver test passed]
[MSG:INFO: A Axis driver test passed]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: Connecting to STA SSID:xxxxxxxxxxx]
[MSG:INFO: Connecting.]
[MSG:INFO: Connecting..]
[MSG:INFO: Connected - IP is xxxxxxxxxx]
[MSG:INFO: WiFi on]
[MSG:INFO: Start mDNS with hostname:http://fluidnc.local/]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
[MSG:INFO: Laser Ena:NO_PIN Out:gpio.26 Freq:5000Hz Period:8191]
[MSG:INFO: Flood coolant gpio.2]
[MSG:INFO: Mist coolant gpio.16]
[MSG:INFO: Probe gpio.36:low]
ok
I’m not 100% sure of these settings
tmc_2209 UART1 Addr:3 CS:I2SO.22 Step:I2SO.21 Dir:I2SO.20 Disable:I2SO.23 R:0.110