That actually looks pretty cool. Having not looked at that link yet: other than cost, what puts it in the consideration for you? The $50 cost for stl’s for me isn’t a showstopper if it actually works. I’d be willing to pay for V1E stls because they work. I just bought stls for kickstarter to print a beehive if I could just find enough time to get my printer printing…
@Mcunn sorry to hear about the budget crunch. Guess that is just more time to research.
This is one of those things to build to learn how the robotic control system works. If it really could be built for $400… assuming you buy the $300 hardware kit, the $50 print files, enough PLA or PETG to print it, a controller would still be required… though it looks like they use the mega 2560 and some add-on drivers for steppers.
one thing from their FAQ site with the drawings:
Do I have access to future updates on robotic arm by purchasing this version?
Absolutely yes. If you buy this early version giving support to this project in the most crucial period you will get all the future updates for free.
Still playing with gear ideas. Stumbled across this guy, the Split Ring Compound Planet Epicyclic Gear
His design isn’t refined for use but 528:1 reduction in a 2 inch tall package is impressive. The second stage uses the alternate output on the planetary gearset (outside ring) as the output.
that planetery gear setup is how a lot of the monster trucks, loaders, and other heavy equipment hubs work. That split ring part is another layer of complexity to further shifts the gear ratio. Very cool. Thanks for sharing.
I am a fan of compound planetary gears. I made a compound planetary gear a while back based on designs from youtuber Gear Down for What.
He also was working toward robot arm applications. Here’s one:
One thing about this compound planetary design is that one planet/ring configuration is sandwiched between two copies of the other planet/ring configuration, so it is symmetrical. Without this sandwich configuration the torque between input and output rings makes the planets want to skew sideways. I.e. the axis of the planet gears turns into a helix. With the sandwich configuration they stay straight. Either way they have to support the shear load between the two configurations, but that’s unavoidable.
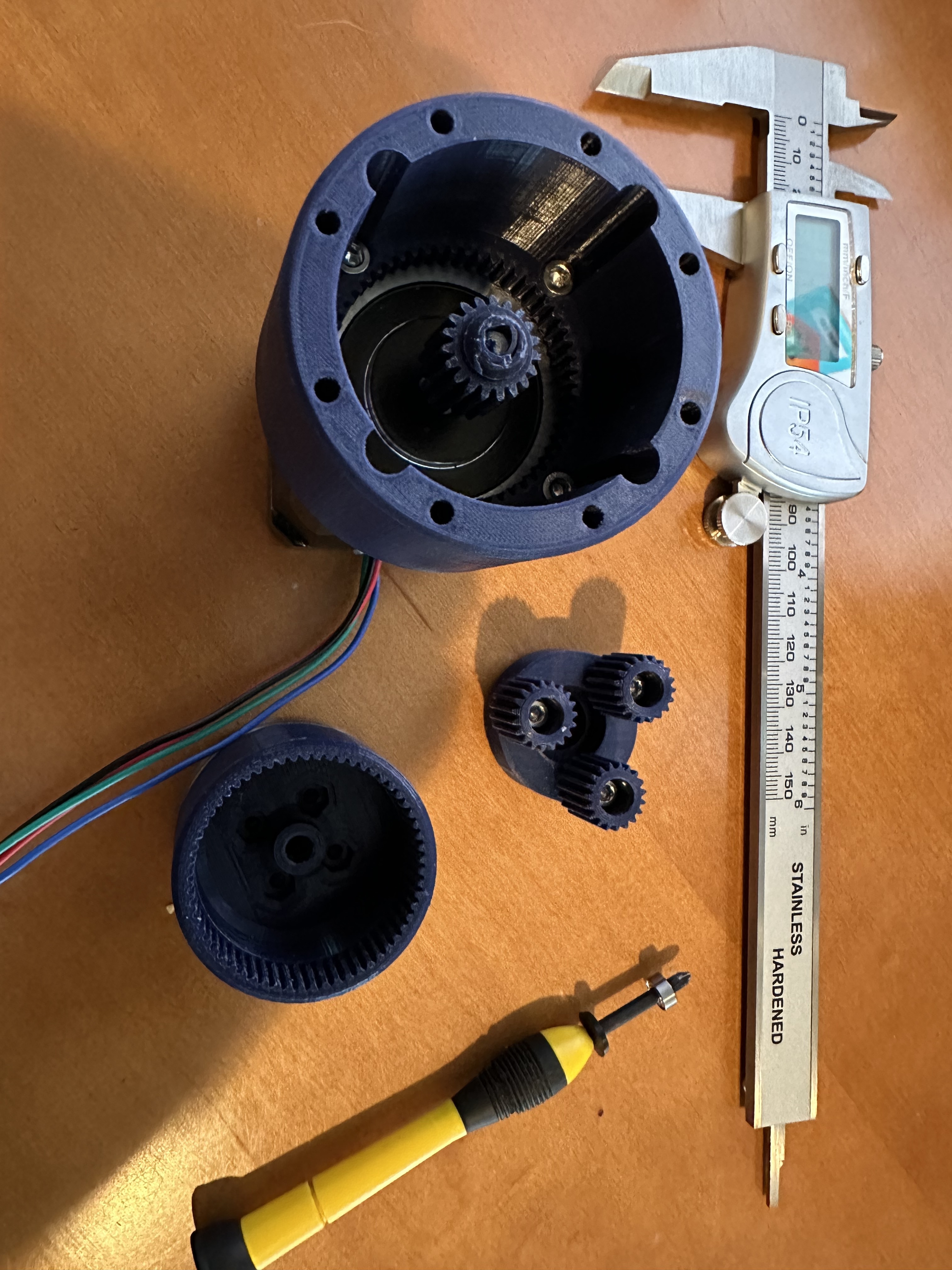
I ended up printing a compound planetary gearbox just to test… the gears were a bit finicky and had to tweak print sizes but it’s suprisingly solid with zero backlash so far.
Gearset gives me 80:1 with around 18rpm from a nema 17 with 12v 1amp power supply. Not to shabby for spare parts and some plastic. Waiting on an odd sized bearing to arrive before I can test load.
Building would be a strong word. Spending some brain cycles thinking about it, printing some test parts, trying to understand the pain points. Still learning the right questions to ask.
In the meantime tuning my Primo to cut aluminum so I can generate some of the parts I anticipate needing.
You know, there was somewhere I watched someone program the bed to extend all the way, and then a wire or rod knocked the part off of the bed.
They of course did not use glue or hairspray, but it was fairly cool!
the part then went in to the bin and the next part took off.
Still building my list of requirements but I’m viewing this as a display piece that would sit on a side table in my office and interact with guests.
Ideas include being able to play chess, assemble a Lego mosaic on the wall, solve a rubics cube etc. not sure if any are in my skill set but just a wish list.