ok, had some other things to do… but somehow I felt I had to try this stuff first 
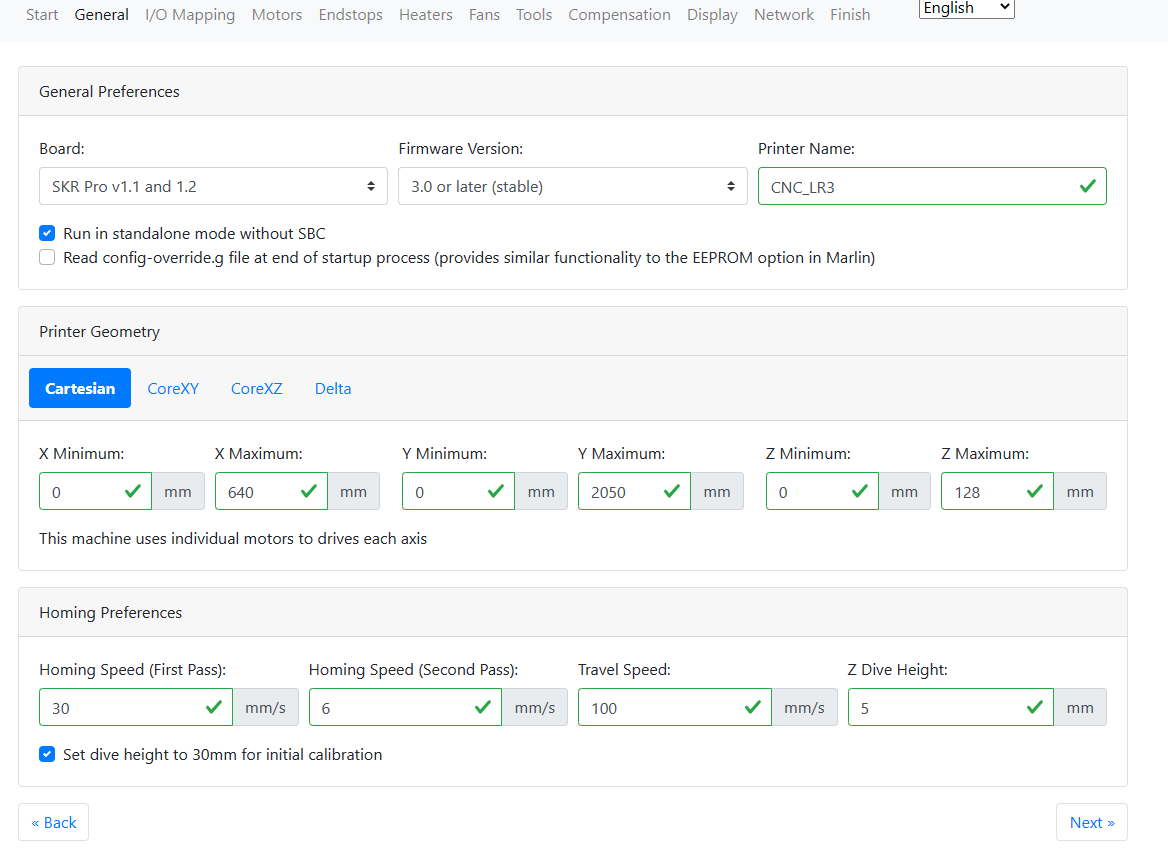
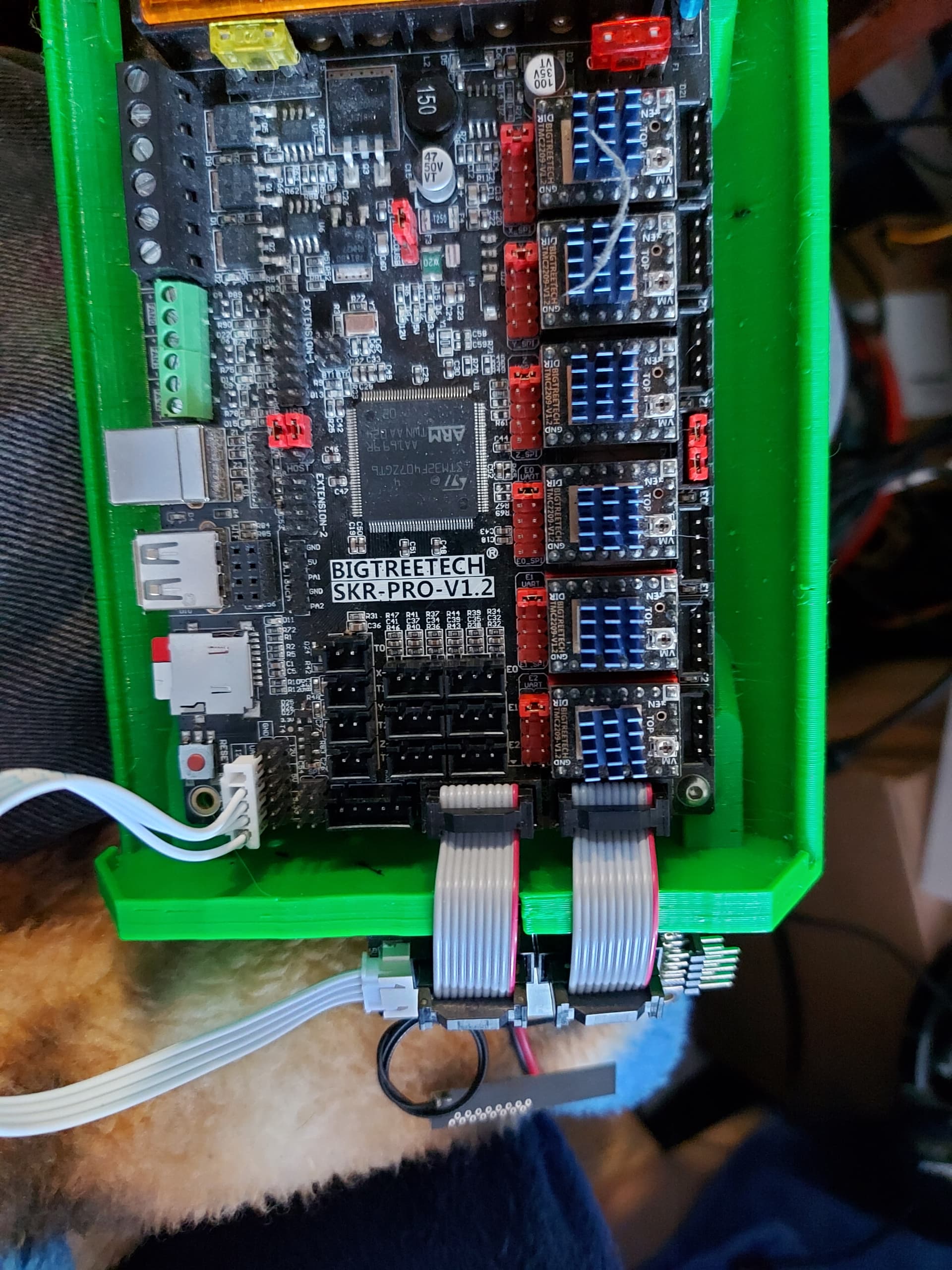
I got RepRap running on my SKR Pro 1.2 although I had to experiment quite some time.
Must confess I will probably stick with RRF if I can get it all running. There seems to be some very nice features I didn´t have on Marlin (like not being able to move outside my bed area, needing to home first before I can move, auto increase Z height on moves… some basic stuff that I had some issues with in the past that will make life easier).
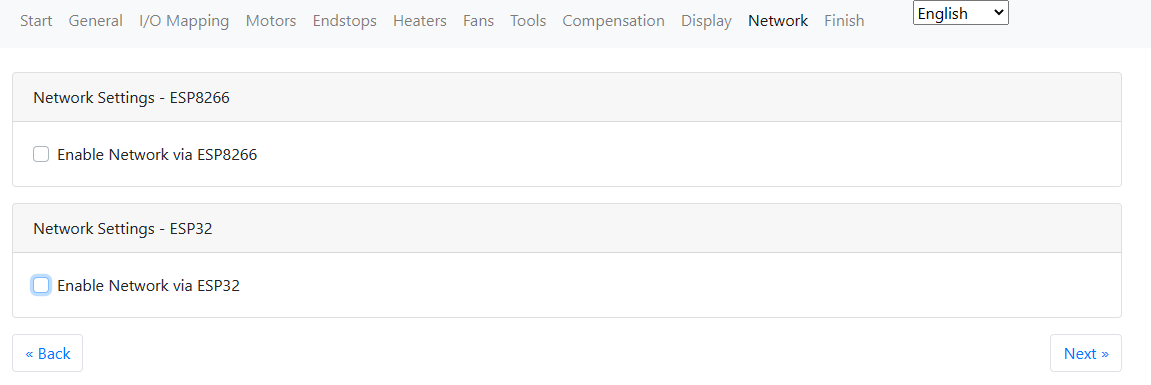
I didn´t manage to get the display working using EXP1 & 2. But that wont be a big deal as in the end those will be used for the wifi adapter. So I updated “board.txt” to the following config, to remove those settings:
// Board Hardware configuration file for SKR Pro
// generated by RepRapFirmware Configuration Tool (LPC Version) v3.4.0-LPC-STM32+6
// on Fri Apr 07 2023 12:00:45 GMT+0200 (Midden-Europese zomertijd)
//Note: Each line should be less than 120 characters.
// : Unwanted options can be commented out or set to NoPin. Lines commented out will get default values
// : for pins the default is NoPin.
// : Values for Arrays need to be contained within { and }
// : Comments can be defined with // or # (comments are not supported inside arrays)
// : Each config entry must be all on a single line.
board = biquskrpro_1.1;
//LED blinks to indicate Platform is spinning or other diagnostic
//Comment out or set to NoPin if not wanted.
leds.diagnostic = A.7;
heat.tempSensePins = {}; //Max of 3 entries
//heat.spiTempSensorCSPins = { }; //Max of 2 entries
//TMC Smart Drivers
stepper.numSmartDrivers = 5;
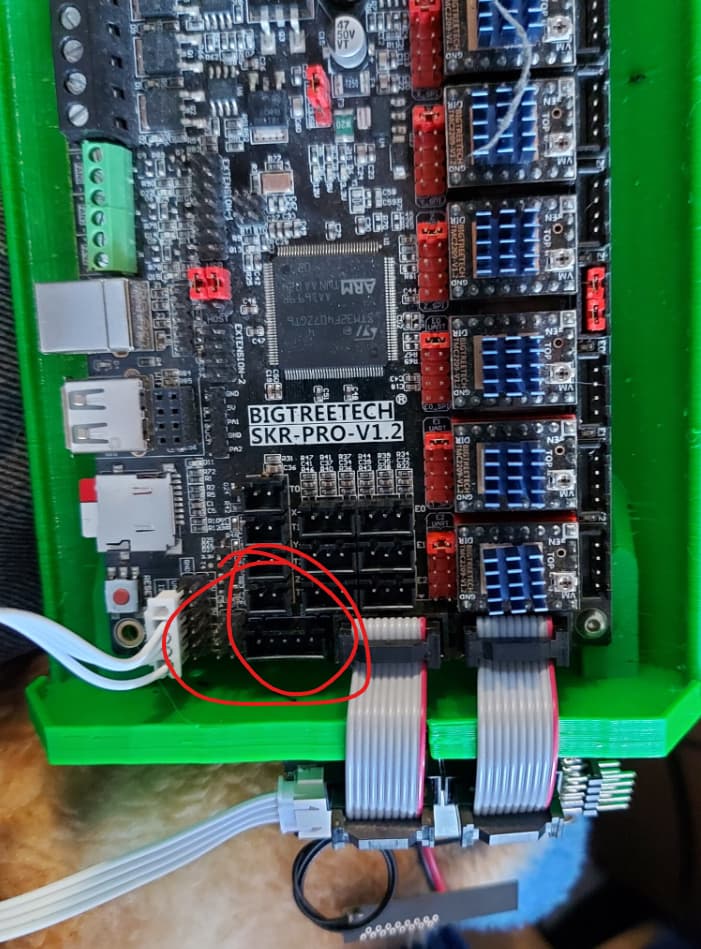
//Connecting a screen to a SKR Pro v1.1 and v1.2
//https://teamgloomy.github.io/skr_pro_screen.html
serial.aux.rxTxPins = { PA_10, PA_9 }
Next, it took me some trails before I got the display running. I know it was working since my fans ran so figured it would be some issue with baudrate. As I am using the latest V1 TFT firmware I had to grab those settings (250K)
M575 P1 S2 B250000
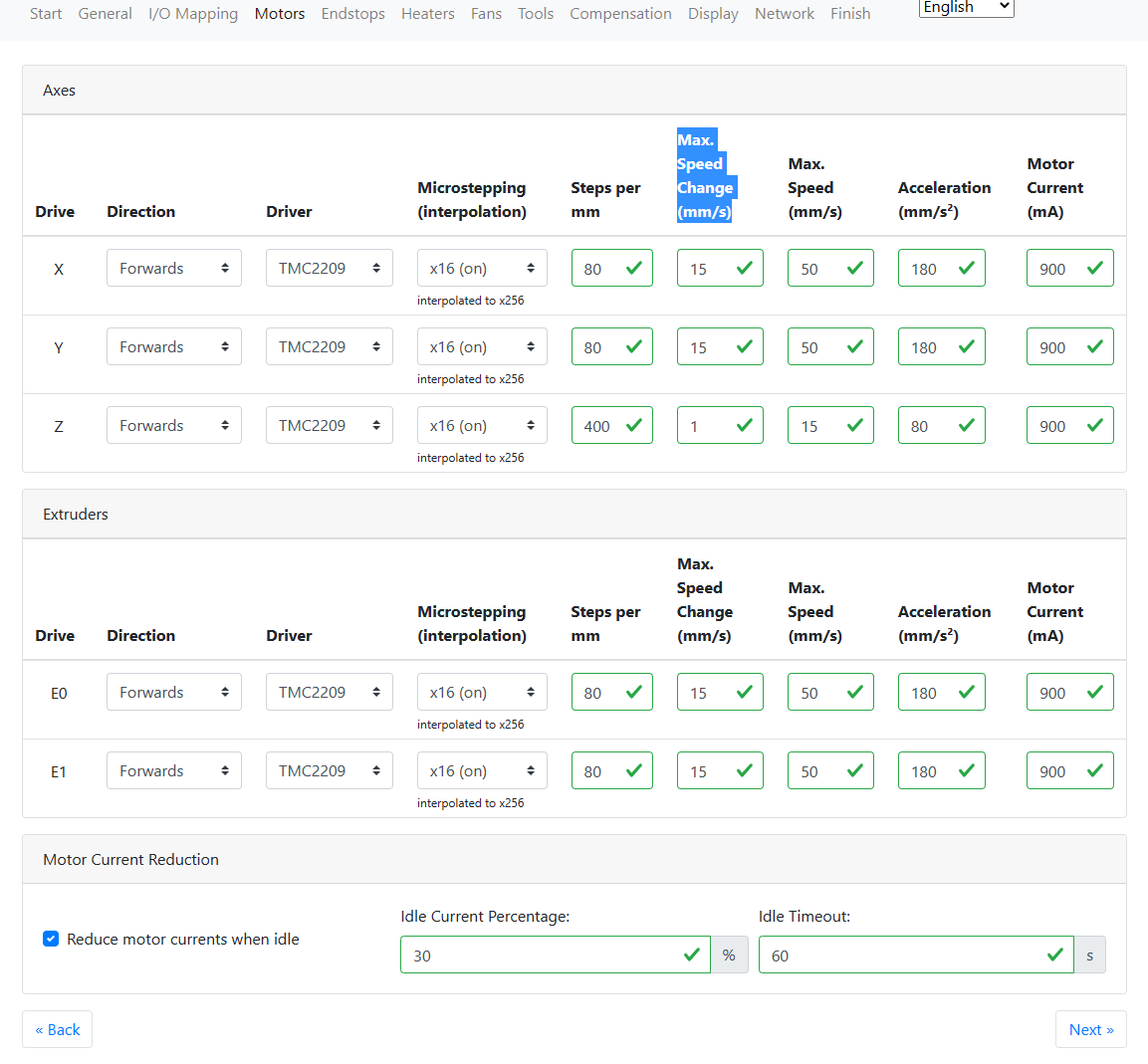
I previously used the steppers on my LR2. During some firmware upgrade 2 of the steppers had been reverted in coding. Obviously that came in to play as they now wanted to go each into another direction 
So I had to modify the running direction and that seemed quite easy in RRF! Love it 
; Drives
M569 P0 S1 ; physical drive 0 goes forwards using default driver timings
M569 P1 S0 ; physical drive 1 goes backwards using TMC2209 driver timings
M569 P2 S1 ; physical drive 2 goes forwards using default driver timings
M569 P3 S1 ; physical drive 3 goes forwards using default driver timings
M569 P4 S0 ; physical drive 4 goes backwards using TMC2209 driver timings
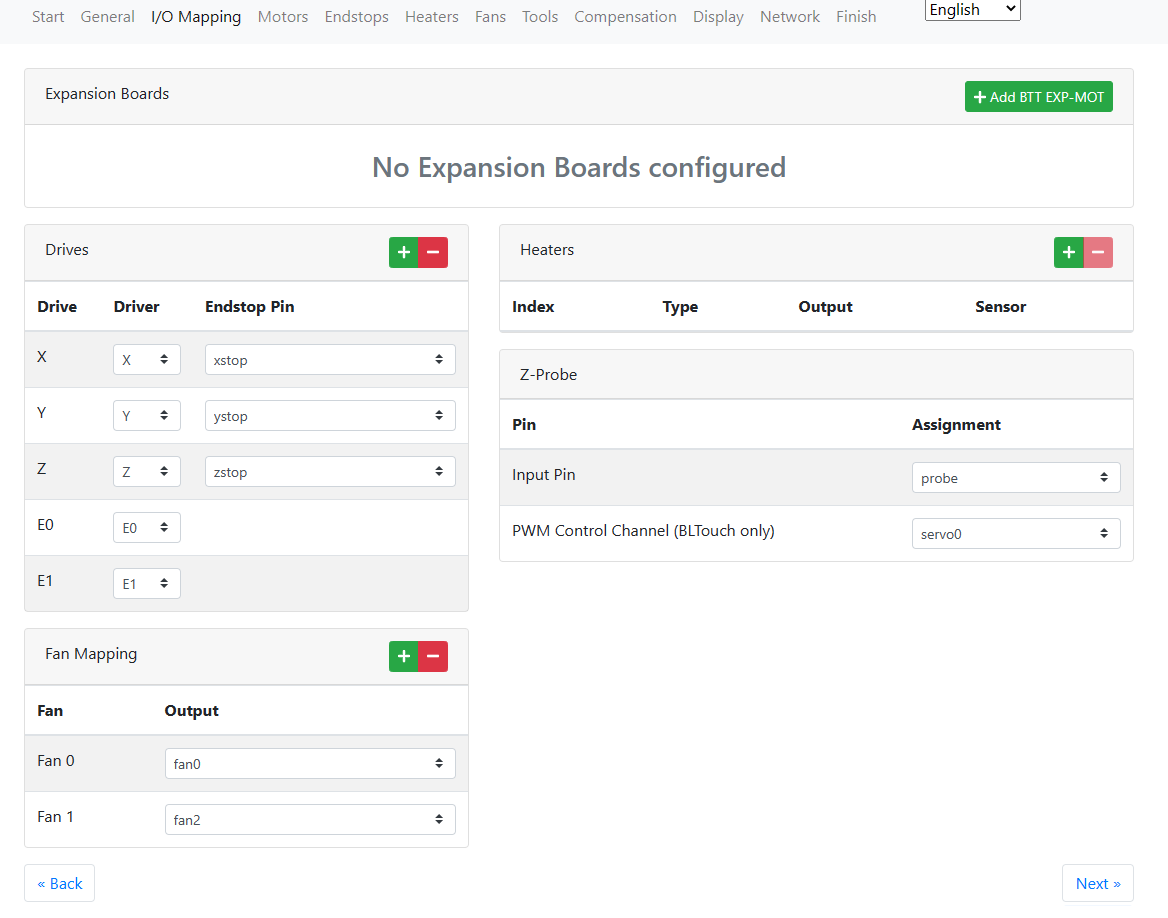
This did the trick for me, to activate the X endstop.
However for the Y´s I had to change your settings as the combination did not work. (still have to check that each endstop correspondents to the correct motor)
; Endstops
M574 Y1 S1 P"^ystop" ; configure switch-type (e.g. microswitch) endstop for low end on Y via pin ystop
M574 E0 S1 P"^e0stop"
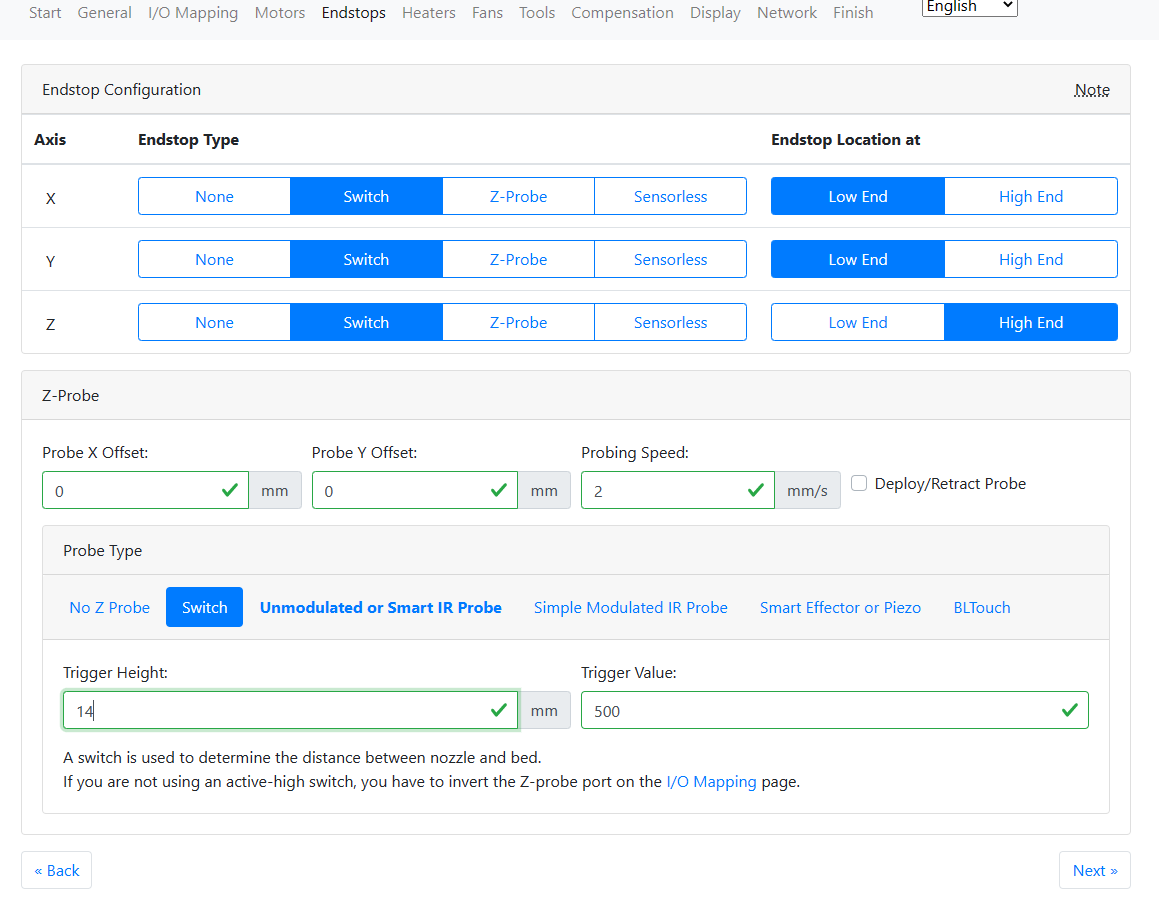
Unfortunately I seem unable to figure out the settings for the Z endstops.
I now have the below code. Re-reading your previous comment I consider adding an exclamation to see if that helps.
M574 Z1 S1 P"^zstop" ; configure switch-type (e.g. microswitch) endstop for high end on Z1 via pin zstop
M574 E1 S1 P"^e1stop"
A short homing session (without Z) worked fine on X & Y. So I am confident to get all things working just fine.
Important to note is that the SD card needs to be insert all the time to work. I hope I will manage to get USB stick to work too as I am not a fan of using the SD card (during my quick tests I already corrupted one :s ).
I will also need to reconfigure the TFT. The error “no printer connected” remains on the screen although it all works. In the BTT github I´ve seen a separate config file for RRF so that will likely have some fixes for it.