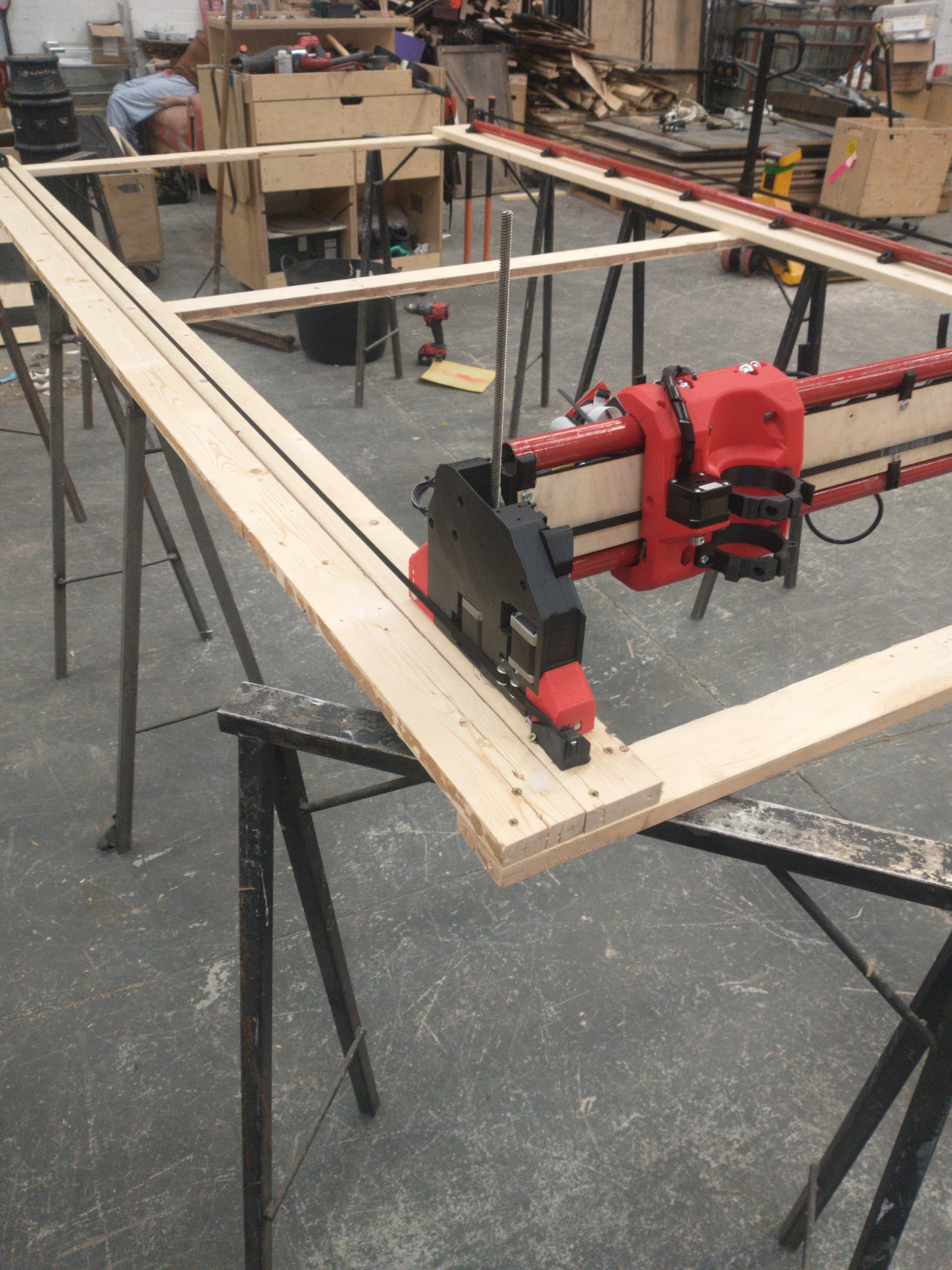
Per LR4 Rails - UK - #6 by FreneticScribbler I’m currently in the process of throwing together a parts bin full sheet LR4, recycling parts from a Chiron printer. Far from the “yellow brick road” approach, and at this point I’d add my voice to all the others saying take this road. Down my path lies faff and madness. I have had fun and enjoyed myself though ![]()
Lots of little snags I’ve had to solve because of my rat rig approach - not least that the endstops I picked for Y didn’t have long enough levers to reliably trigger. And the paint thing mentioned in the other thread. Real world forehead slap when I realised what I’d done to myself there… !
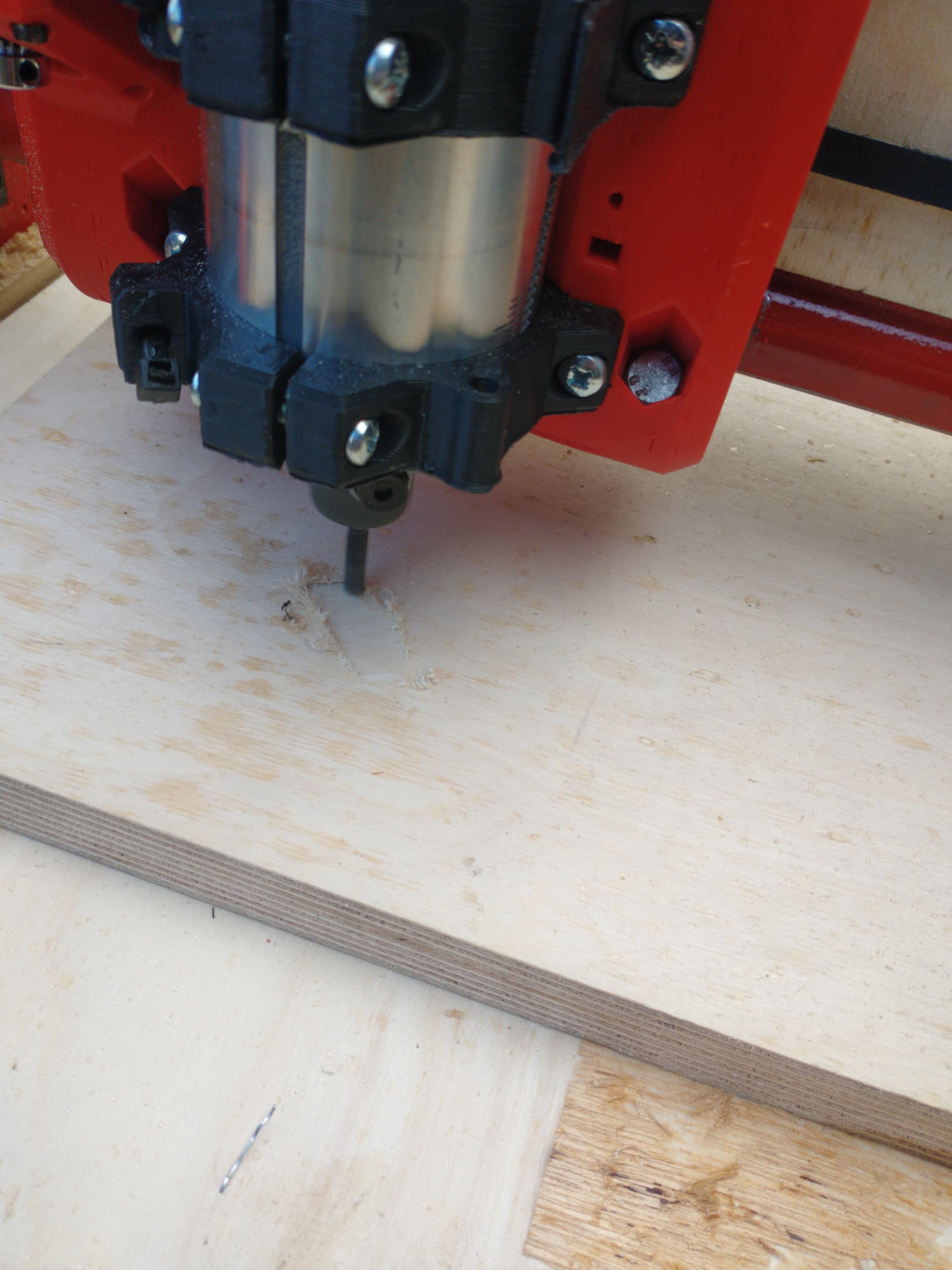
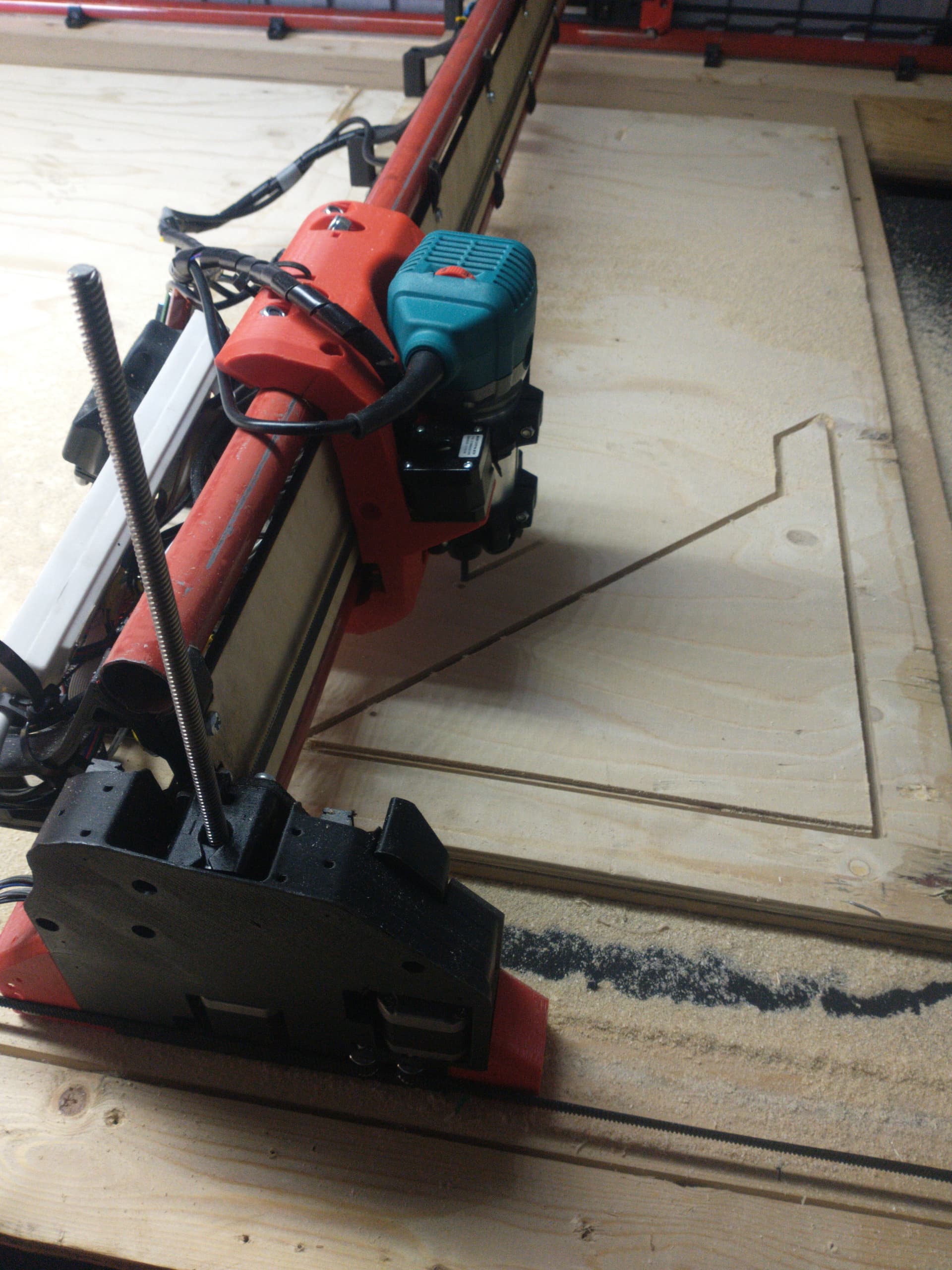
Nevertheless, nearly at the point of a ready to go machine here. For now, I’m running the machine with the Trigorilla board out of the Chiron, which has been… fun. Totally appreciate it’s not a yellow brick road config and so I can’t (and don’t!) expect help but figured I’d post up just in case someone else is doing the same and has hit all the same speedbumps I’m currently encountering. My steppers are moving further in the real world than commanded to by Marlin - I guess this is the Trigorilla board having the wrong microstep setting? My Y axes are also moving different amounts of wrong, to boot, but I’m pretty sure this is because I seem to have mismatched the motors (not all the motors from the donor machine are created equal) so I’m going to swap one out tomorrow and see if that solves that, at least.
A Jackpot board is in my shopping basket! (but I’d still like to get the machine making chips in the intervening time)
ETA: Also possible I’m using pulleys with the wrong number of teeth, I’d best check that too…