I am going to change the title of this thread so newcomers do not fall into this rabbit hole and have serious doubts about the capabilities. Just to be clear, milling Aluminum is fairly easy, steel can be done with an appropriate sided build.
2 Likes
Let me just interject my two cents on loading.
You can easily control RPM 27,000 is not set in stone, we get a range from 10,000 and up. with the routers suggested, Spindles are an option. So feedrate does not have to be the limiting factor, power and rigidity are what I always found were.
If you do want to move faster just get larger pulleys.
I am still convinced the rigidity is the limiting factor in material removal rates of both builds.
Material removal rates should be what all assumptions are rated against. It is the ultimate goal.
3 Likes
Are we talking n (or N) as Newtons? 1 N is equivalent to 0.225 lbs force. 1.7N would be 0.38 lbs force, or about 6 oz of force.
That is way lower than strengths that everyone is seeing.
You say these are necessary, yet I cut aluminum on my MPCNC with none of these. NEMA 17, no gearbox, single flute, and even series wired. These speeds/depths seem reasonable to me.

I enjoy theory as much as the next guy (probably more than most) but I think this needs to get grounded to experience in the garage. The actual behavior of the machine is ultimately the arbiter of any differences in assumptions or calculations.
3 Likes
I’ve been trying to follow this post, but haven’t given it a ton of brain power, but something doesn’t line up here.
If you’re only sending 3-4v across the wire to the stepper, then starting voltage of the PS doesn’t matter… you’r still only sending 3-4v across the wire. You’re pipe is larger, but you’re still only sending the same amount of water.
2 Likes
Yeah. How that actually works is that if there was a lot of loss on the wire. Enough that 3-4V would be insufficient, then 12.5% duty cycle would also be insufficient, and the drivers know that, and increase the percentage. They don’t care what percentage of on time they have. They only try to make sure that the average current going through the wire is the same as the Imax.
The drivers don’t send 3-4V, 100% of the time. They send 12/24V, some fraction of the time. There are some things that benefit being modeled as a full source, and some things that are more intuitive thinking of the voltage as an analog signal.
3 Likes
Gotcha.
More like a sledge hammer vs ball-peen.
1 Like
This (from your excerpt) is exactly what I was saying. The inductive loading means that you get the driven current. for speeds that the voltage is sufficient for. At those speeds or below, higher voltage does not impart higher torque. Since the drivers switch the DC waveform based on current loads, you get a higher frequency on the pulsed circuit with higher voltage. This is necessary to keep the higher voltage from running over the current limits.(12.5% duty cycle versus 25% duty cycle)
I never once said or implied that higher voltage does not increase your speed limit. I said that higher voltage does not give you more motor power at a speed at which the lower voltage is sufficient.
So for those of us who never exceed 4000mm/min, there is very little reason to go to 24V, since 12V is fully capable of providing near rated torque at those speeds, and is certainly capable of hitting the driver current limits that we typically use in order to keep motor temperatures acceptable for mounting to printed plastic parts.
I don’t think so either. The current waveform that is graphed is one where the rising slope only meets the peak current, and does not exceed it. This is the case for full stepping where the voltage is controlled to be sufficient to get to and not exceed peak current (Note that in the first graph, (A) current never rises above I(max)) With the frequency being in this case commanded steps/time unit. This is NOT the same as the case for the pulse-width of the driver pushing V(mot). I think that I read the switching frequency of the TMC2209s at 12.5MHz, at which speed, we can pretty much ignore the ripple that we’ll get at I(max) This switching speed is what allows the 256X interpolated microstepping.
In terms of voltage switching, we get a higher frequency with the lower duty cycle (higher voltage) with the inductance acting to smooth the ripples. This is the only thing that will allow the flat parts at the top of graph A, where the voltage is limited to only what will supply I(max) and no higher.
3 Likes
Agreed, except that PWM frequency does not need to change with input voltage. A proportional decrease in duty cycle is sufficient.
There is a small change.The PWM frequency itself does not, but the narrower pulse width has higher harmonics.
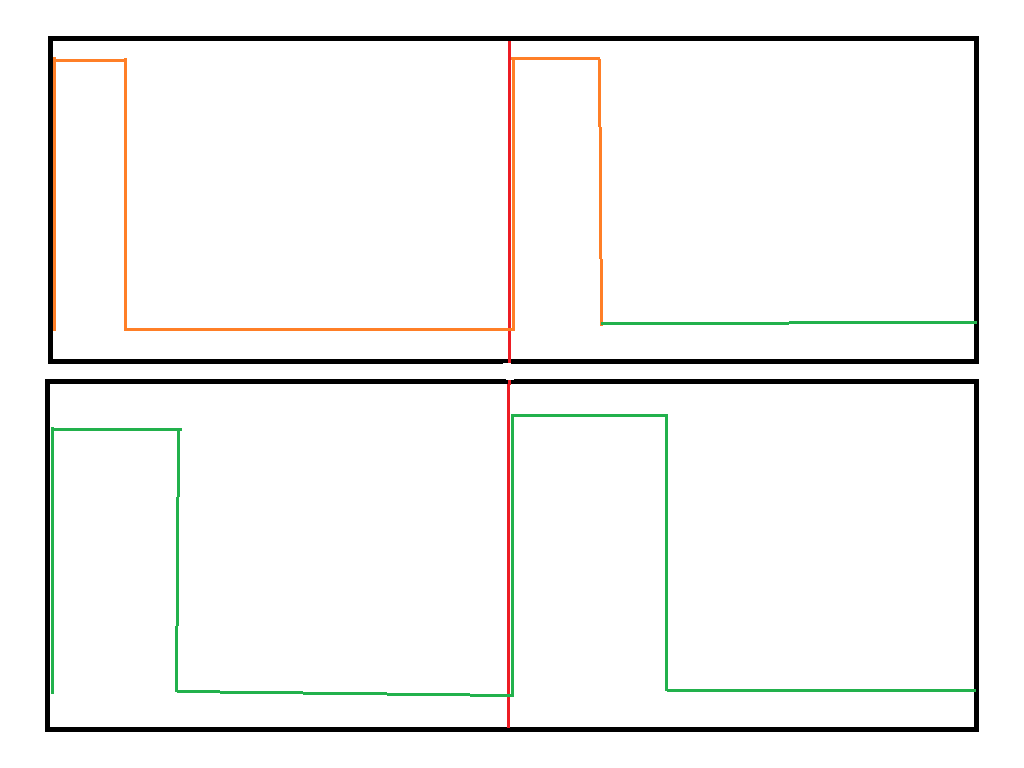
So in this graph, if the X axis is time, both PWM cycles are the same period, but the on time for the top line is operating at a higher harmonic frequency. The inductive load will still react on the harmonic, and even with a proportional increase in rise rate, the shorter timer interval will give the same average current over the 80ns of the PWM frequency.
You are of course right that the PWM frequency does not change, I was in error not specifying the harmonics.
2 Likes
Definitely an interesting topic. The headroom in speed that the 24v provides could be useful in some cases. I for example have a weird 75Ncm Nema 17 stepper on the Lowrider axis with only one motor. It has nominal current of 0.7A = higher resistance & inductance = limited speed. The upside is much less heat from the drivers.
Usually higher voltage means a bit higher losses in driver (switching losses) and motor (iron losses) due to larger ripple. But the overall effect depends on many things.
But to my surprise the Rds-on value of for example the DRV8825 is the lowest at 24V, indicating that it could be the most efficient spot and create the least heat. But again, there are many parameters that affect the net result.
4 Likes
Yep. The way I look at it is that if the cost is comparable go with 24v even if the benefit is small.
I see.
Keyword “reasonable speeds”. It’s a statement of opinion. What is necessary depends on what you want to do. I have said this repeatedly.
The values were picked to stress the point I was making. Do you really think most LR2 builds weigh 25kgs? Nope, it’s an arbitrary value picked to show how the math works. I have said time and time again that these are assumptions and the math is highly dependent on variables specific to your particular build.
Man I have linked you to 3 different external sources. Voltage controls current and current controls torque. Voltage controls torque, the end.
The force you calculated is independent of weight, and amounts to about 6 oz of force. I know for a fact it’s a lot more than that, and I’m surprised you think it’s even plausible.
Should I interpret this as the speeds I think are reasonable, which I showed you, are unreasonable in your opinion? How much faster would you consider reasonable? 2x faster? 5x faster? 100x faster?
1 Like
Again, the values are arbitrary and are just examples. You have to calculate them for your machine. I have said this repeatedly. I am not sure where this intense hostility is coming from. The values I picked for the motors were to make the point that even if the motors have very low acceleration then voltage at high RPMs still matter. At higher acceleration values the voltage is even more important because your machine can more quickly reach the speeds where the torque curve tends to drop. It’s not supposed to be a realistic example and I have said over and over again these values depend on your machine and your needs and must be calculated using those factors which are factors I couldn’t possibly know. I have no idea what motors you have or how faster you want your machine to run. It is quite literally impossible for me to make a realistic calculation for your machine.
Yes. You take the speeds you want to go and you plug those values into the equations. 27mm/s can reach RPM values where 24v provides a higher torque according to numerous charts I have cited. It’s simple stuff, guys. I get that you love the LR2 and think it’s perfect and are offended that some people like to upgrade it but this is quite obnoxious.
This comment helps no one.
It is obviously not a simple thing, at least not for me. No one is offended, these are all very educated people stating their understanding of this. And I have said numerous times, if this is proven I will switch the kits.
Enough with the theory at this point, let’s see some videos or drop this topic. I have tested this and saw nothing. I am all about real evidence when possible, and this is the simplest case of that. Look at my CNC drag race and show some numbers or just be happy with your build being special.
4 Likes
I designed my own CNC so I don’t have to rely on the LR2’s limitations. Thanks for the suggestions. You won’t hear me complaining about the LR2 any longer.
1 Like
This thread was a bit anti climactic. I was hoping to see the formation of online rivalry between two or more people trying to make the fastest mpcnc. Id be keen to race you one day Ryan. But I have a long way to go first.
1 Like
Ugh. I was hoping this thread had died a slow painful death…
1 Like
I was hoping to see bloop’s cnc.
2 Likes
It was all theoretical.
1 Like