I am trying to use a Bigtreetech Octopus pro with 5160 drivers nema23 steppers with sensorless homing. I install firmware and it connects to printer, but wont move any of the steppers, I tried to use one 2209 and switch it over in the firmware and with removing proper jumpers and it wont move stepper either. I have run a M122 and it shows connection ok on all three but no movement. I also ran m119 and all endstops are open. It shows the axis changing number so it thinks its moving? Anyone have any ideas on how to figure out what is wrong?
I am also tried to comment on and off the #define TMC_USE_SW_SPI without any difference.
There could be a wiring issue in how your motors are connected.
What is the result of M122 after you attempt to move all three axes?
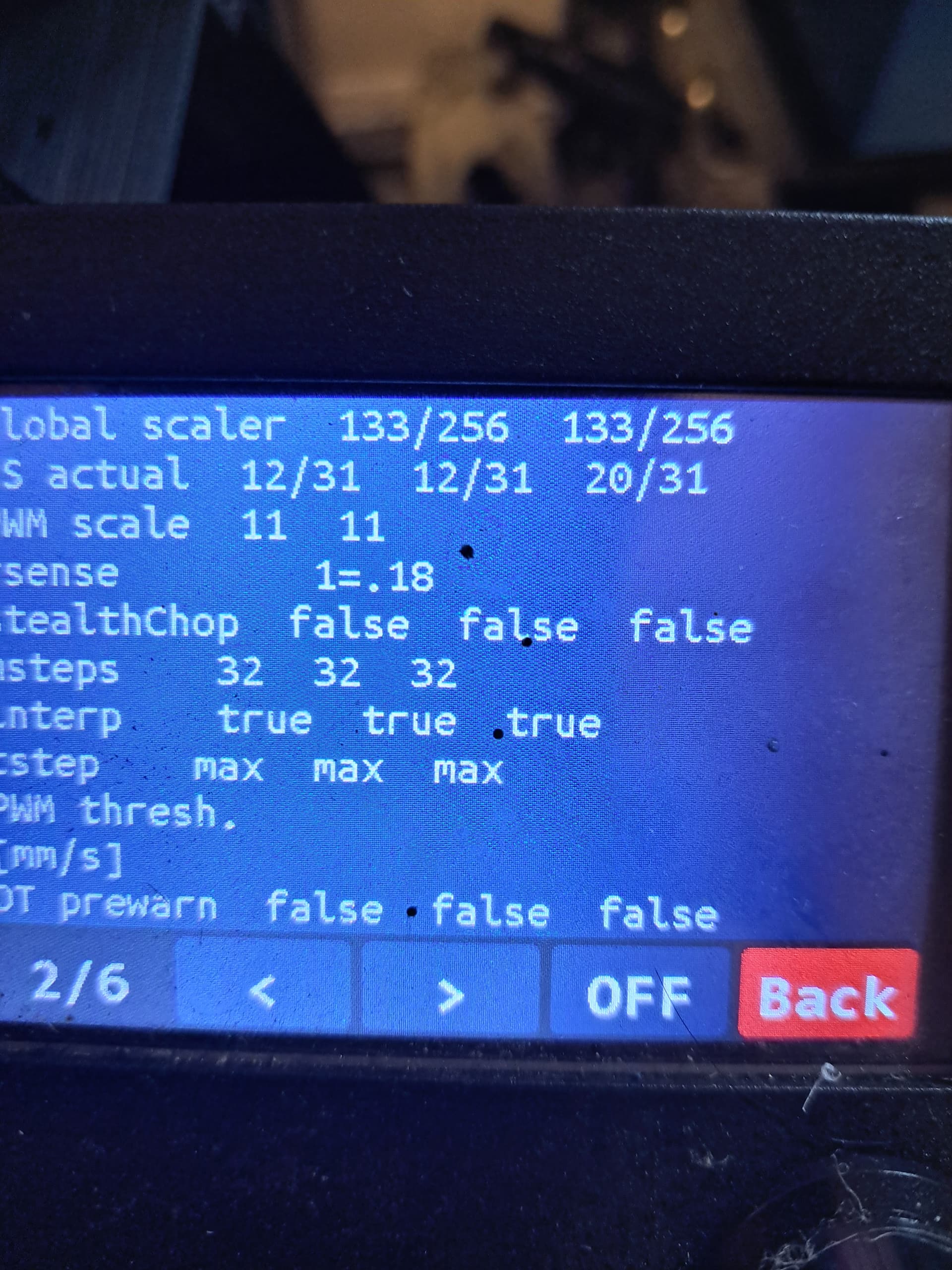
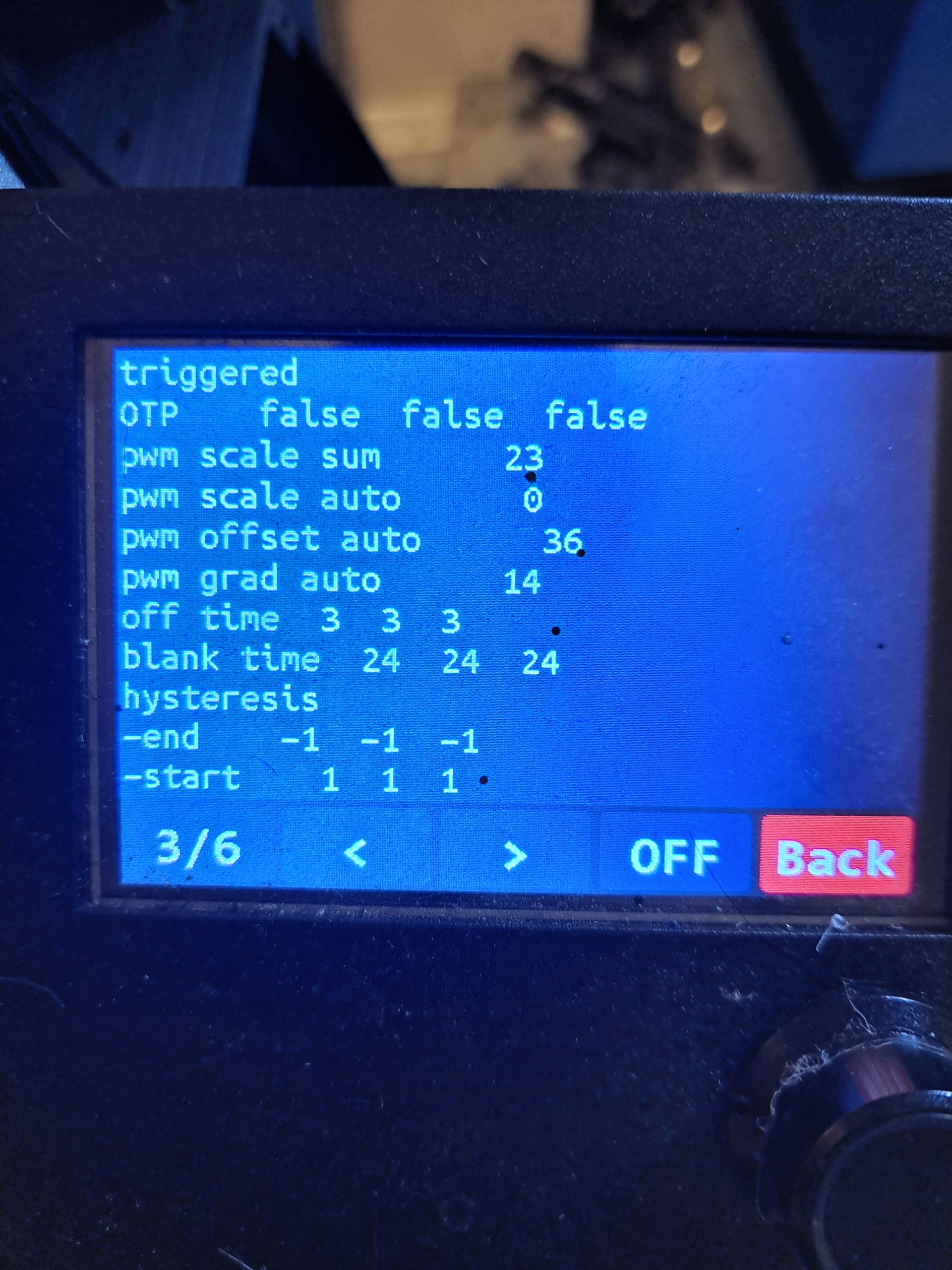
I have checked wiring pairs and they are correct, I also have tried to use a 2209 driver in and changed hardware pins on z with a smaller nema 17 motor, same result, nothing, it doesnt seem to be communicating. when I run m122 I get ok on x,y, and z, i will post pics of the M122 info. I gave up yesterday, going to try again today
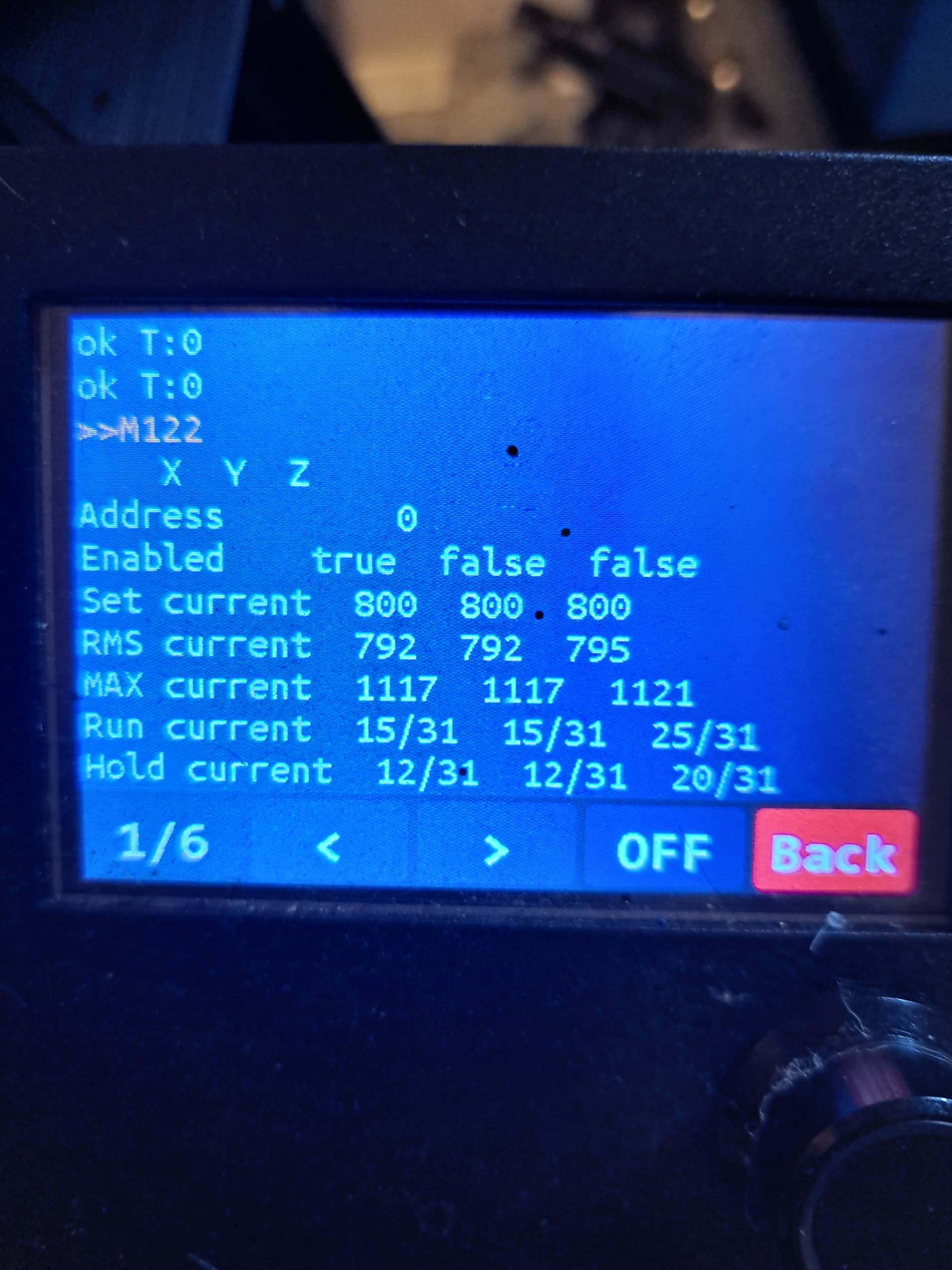
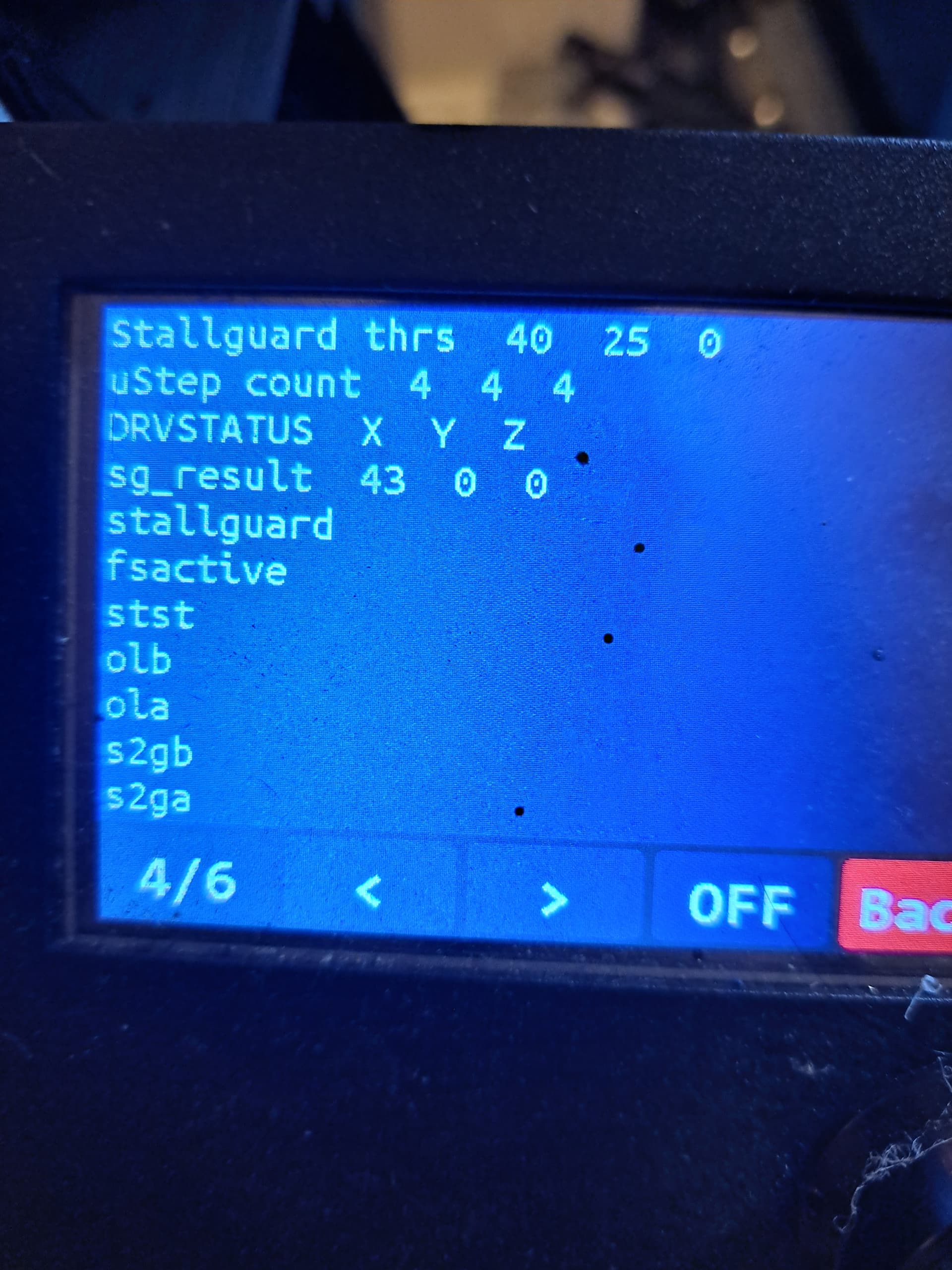
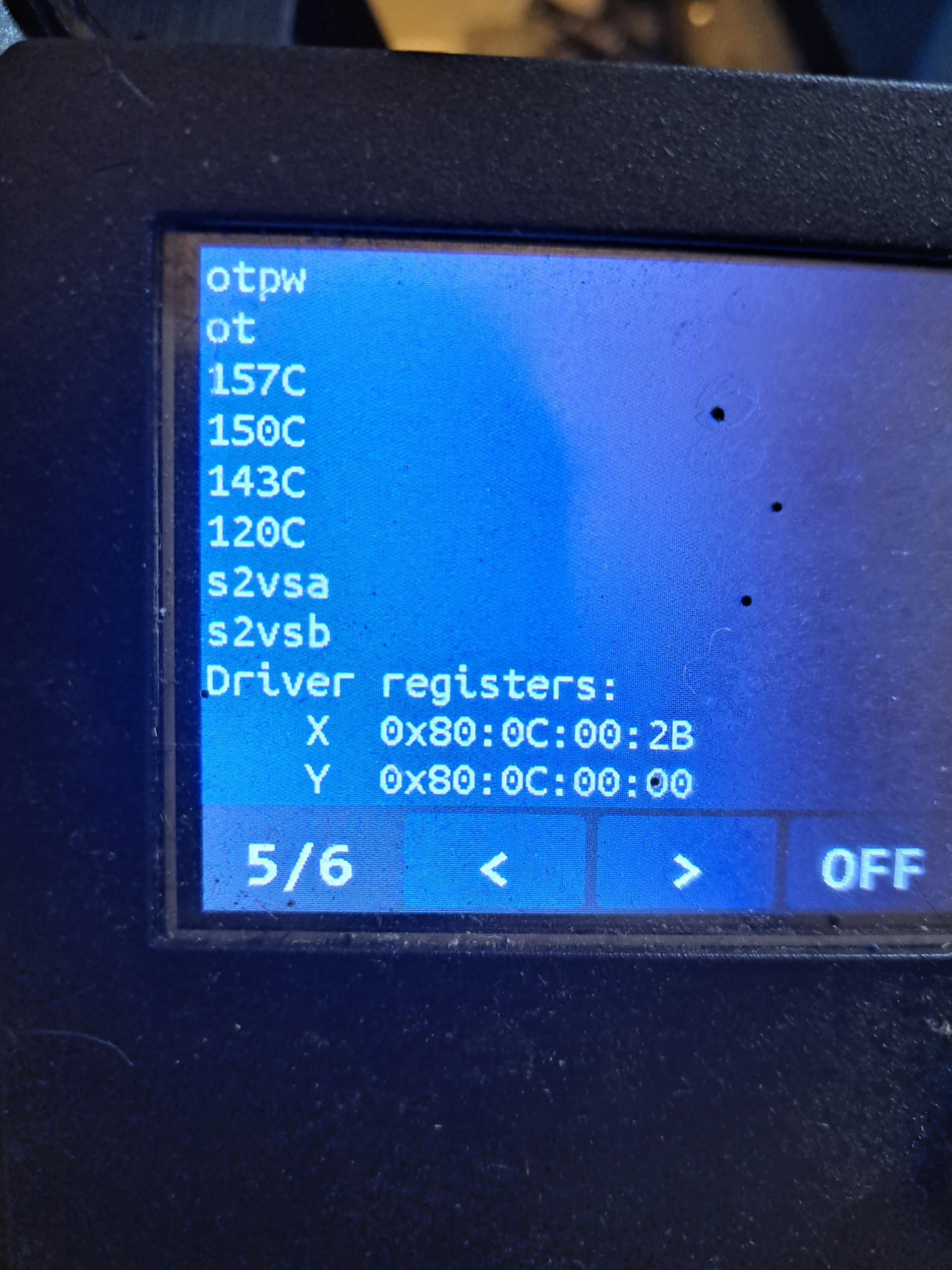
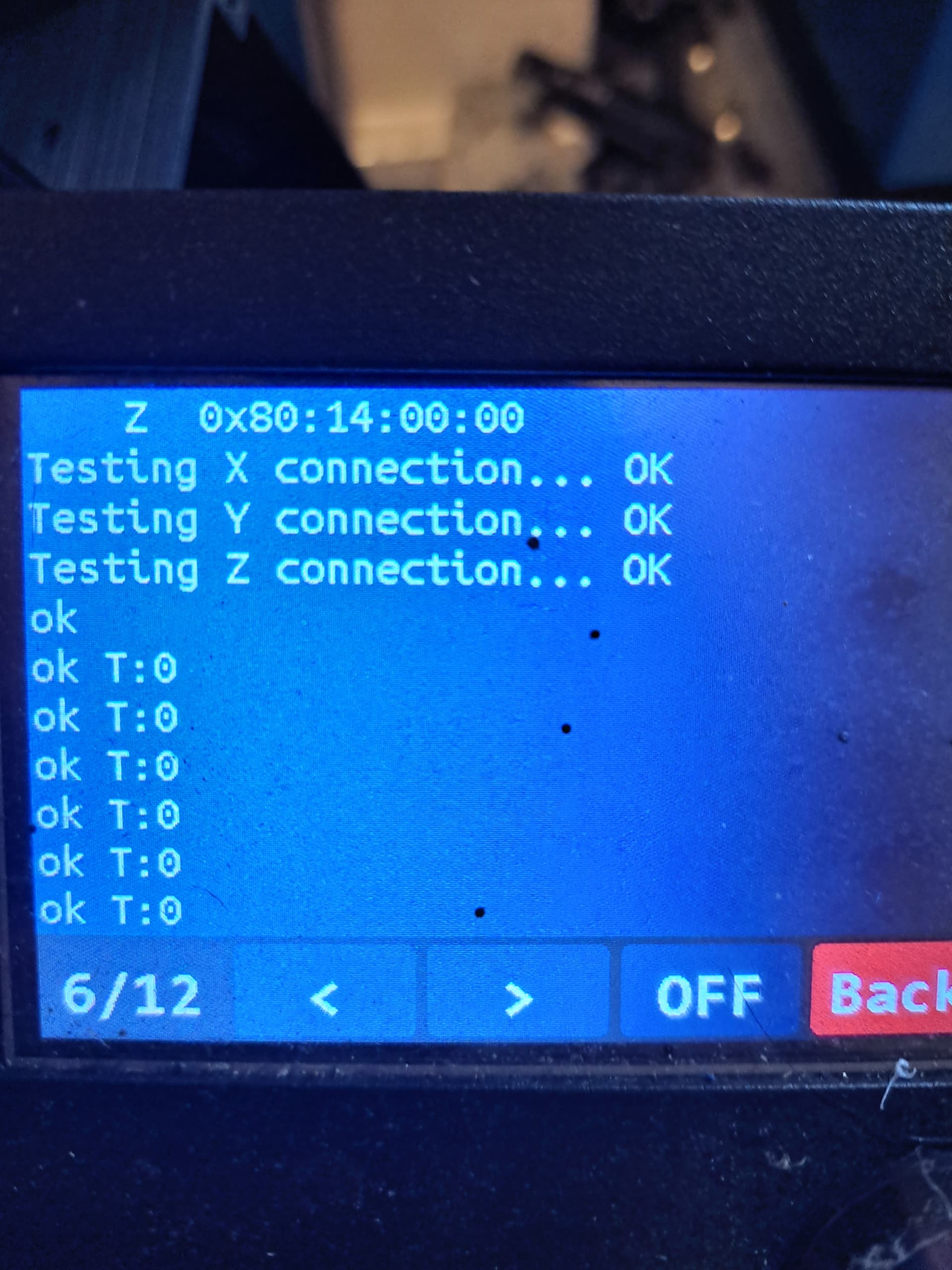
I think the “ola” and “olb” would be indications of open circuit if the motors were not connected, so that’s probably not the issue. And “Enabled true false false” means at least one of the drivers has gotten some step/dir pin inputs.
The only other thing I can think is if the motor supply were faulty or not connected properly. Can you measure the voltage on the VMOT pin of the stepper driver (or the socket)?
Yes, I am getting 24v at the VM pins on all, and on the 5160’s I have no voltage on the vref pin, and on the 2209 I have 1.1v on vref. Still no motor movement, I was worried it was my config or software, so I downloaded the Bigtreetech github firmware, changed my chip in platform.ino, my motherboard in config.h, and changed the motors to match drivers, and still nothing. I am wondering if it is this board, I have another one coming so I should know if it is the hardware in the next few days… I am stumped.
Experiencing a motor-related problem in the 3D printer setup utilizing the BBT Octopers v1.0 board and Marlin firmware. The configuration consists of one X motor, two Y motors, four Z motors, and one extruder, with the concern revolving around the connectivity on the BBT board.
Connection Configuration: The motor connections on the BBT board are structured as follows:
- X
- Y1
- Duplicate of Y1
- Z1
- Z2
- E0
- Y2
- Z3
- Z4
Specific Motor Issue: The motor connected to the Y1 driver is non-functional, displaying no motor voltage and Vref voltages on the respective pins is 0.
Additional Details:
- Board: BBT Octopers v1.0
- Firmware: Marlin
- Motor Configuration: X(1), Y(2), Z(4), E(1)
Seeking guidance or insights to effectively address and resolve this specific motor-related issue. Your assistance in this matter is highly appreciated.
With the duplicate motor connection, the SKR Pro does that with the Z driver, and the second connector needs 2 jumpers on it. The 2 connectors are in series, so motor power goes from pin 1 of the first connector through the motor to pin 2, and from there goes to pin 1 on the second connector, and to pin 2 via a jumper. From there it goes back to the driver chip. The same things happens with pins 3 and 4. If there are no jumpers on the second connector, the driver just sees an open circuit, and no power flows.
I suspect this to be the case, based on your description of the Y1 motor having no power.
close older topics to help with spambots, and faster new user questions.