i have bought on Aliexpress the couple:
BIGTREETECH SKR PRO V1.2 32bit MotherBoard 3D Printer Parts TMC2209 SPI MKS GEN L RAMPS 1.4 SKR V1.4 Skr2 Kossel
BIGTREETECH TFT35 E3 V3.0 Touch Screen 12864 LCD Display WIFI Module For SKR MINI E3 V3.0 Octopus Pro Ender3 CR10 3D Printer
upgraded the software to:
V1CNC_SkrPro_2209-2.1.1
BIGTREE_GD_TFT35_V3.0_E3.27.x.bin
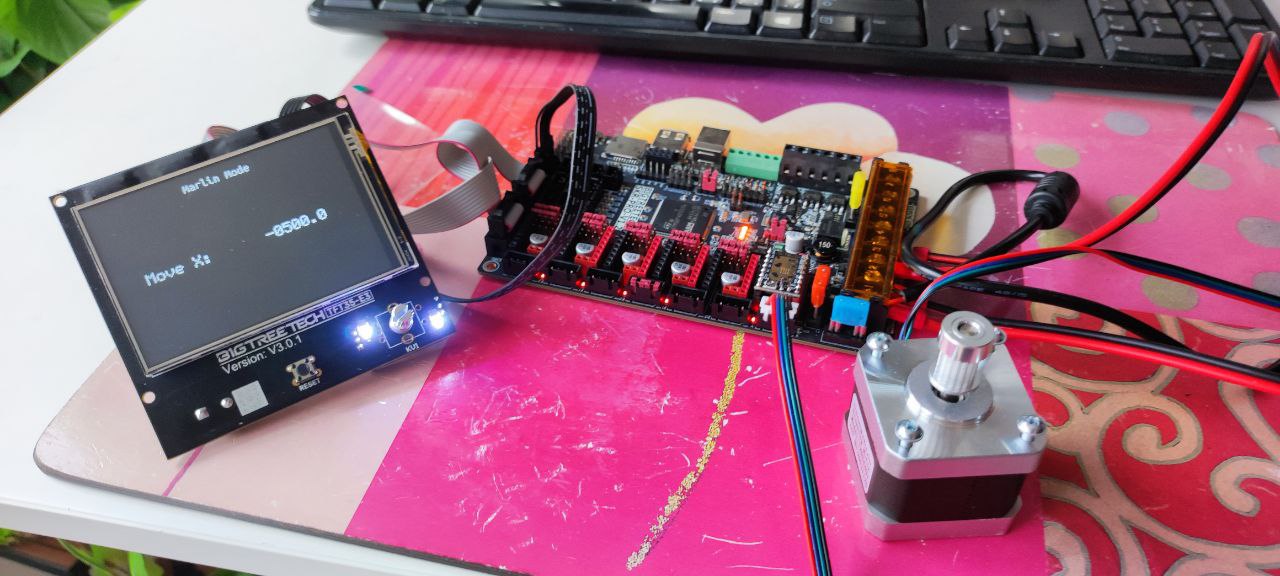
I have connected control and TFT boards as :
TFT - RS232
EXP1 - EXP1
EXP2 - EXP2
connected 1 motor for X coord to test.
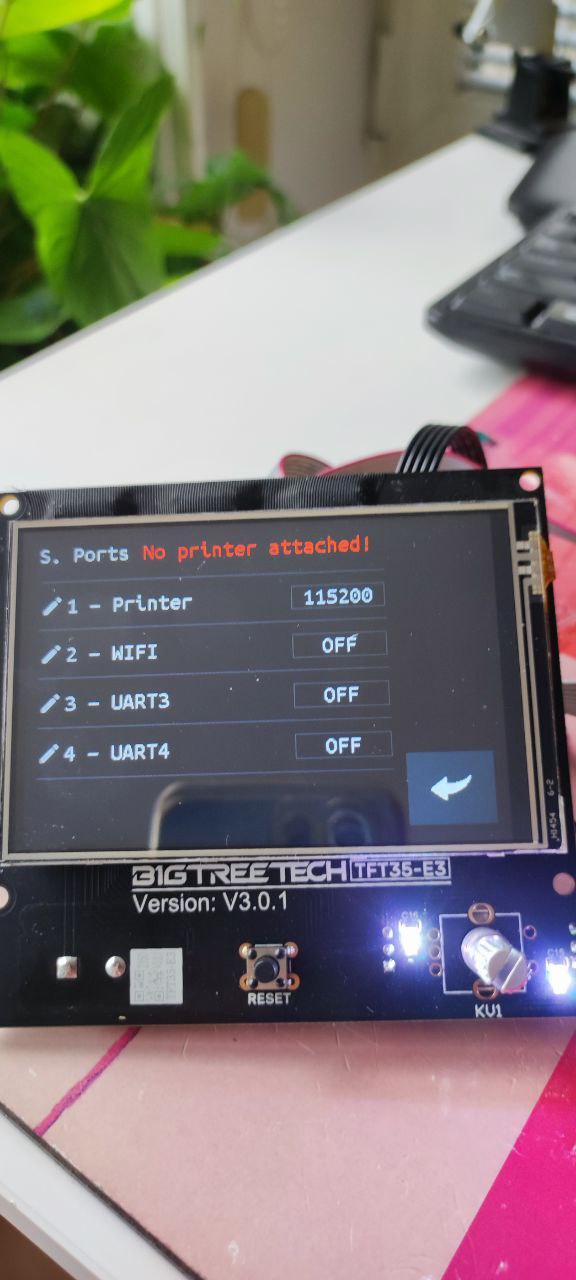
the RS232 baud rate is 115200
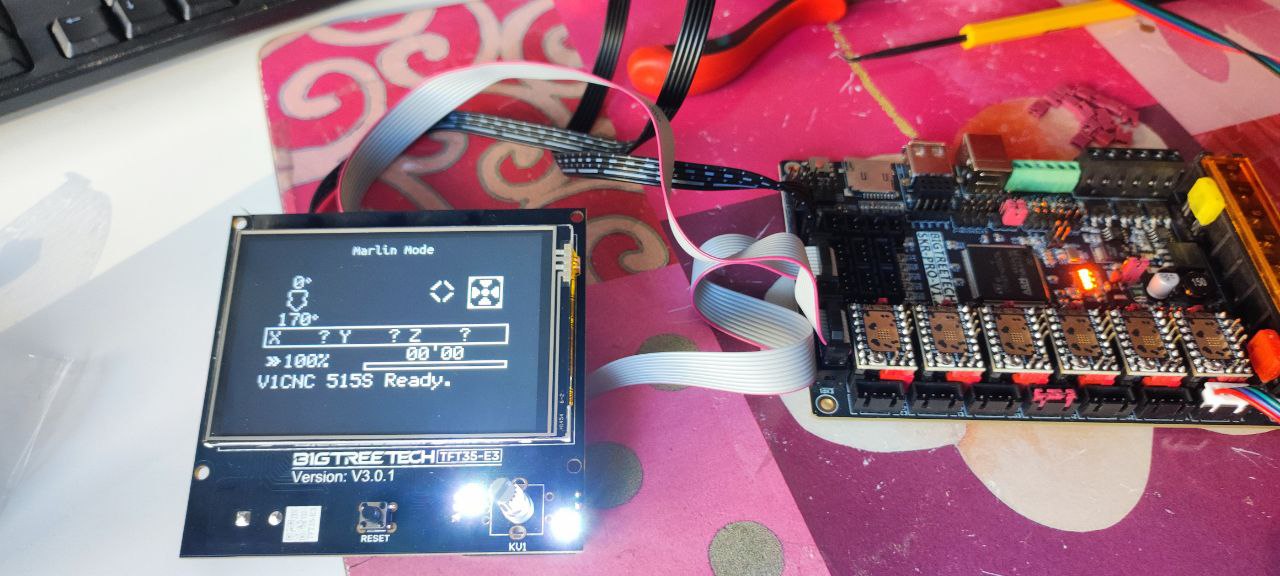
In touchscreen mode I have a status No printer attached
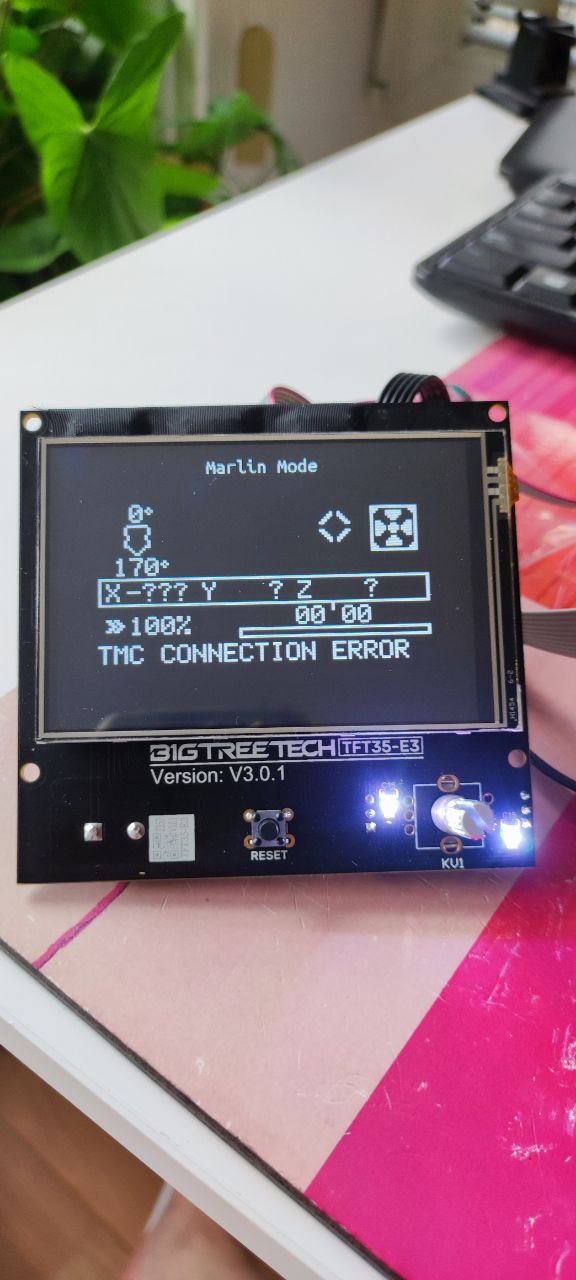
in Marlin mode i have a status THE CONNECTION ERROR , but can rotate the motor in Motion - Move Axis - Move X menu.
@Frits thanks a lot!
I have got a good status in Marlin mode and still have a bad on on Touchscreen mode(( Dont you have any good advise in this case?)
Based on this video Big Tree Tech SKR 2 - Install - Marlin Configuration - Chris’s Basement Check the inspection sticker on the back of the board. If there is just one green sticker it is likely one of the boards that has a bad mosfat chip. If there is a green inspection sticker and chrome inspection sticker it’s probably still good.
oh yes, you are quite right… i have only one green sticker. Ill try to return it but what do you think , is it possible to just replace the mosfet chip?
with a ramps 1.4 for marlin board the mosfet is very easy to replace. Just cut the 3 pins underneat the mosfet and desolder the pins one by one, make sure the holes are clean, put the new mosfet in place and solder the pins. With the board you have I do not know.
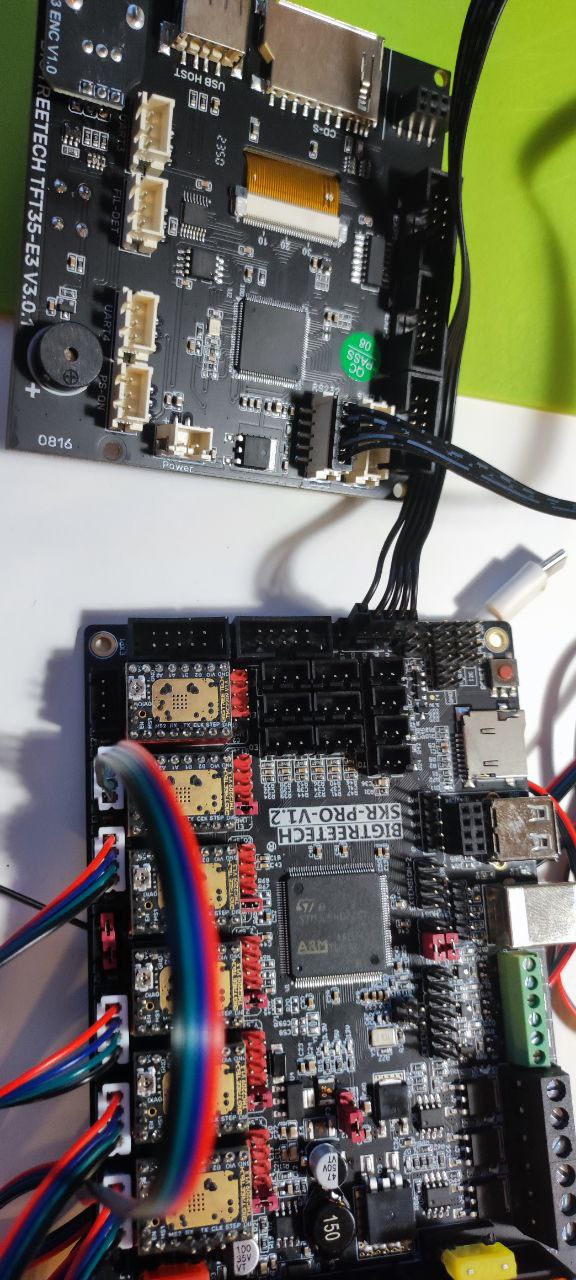
@MakerJim hello! i have bought a new skr pro v1.2
the RS232 wiring is on the photo.
the firmware is V1CNC_SkrPro_2209-2.1.1
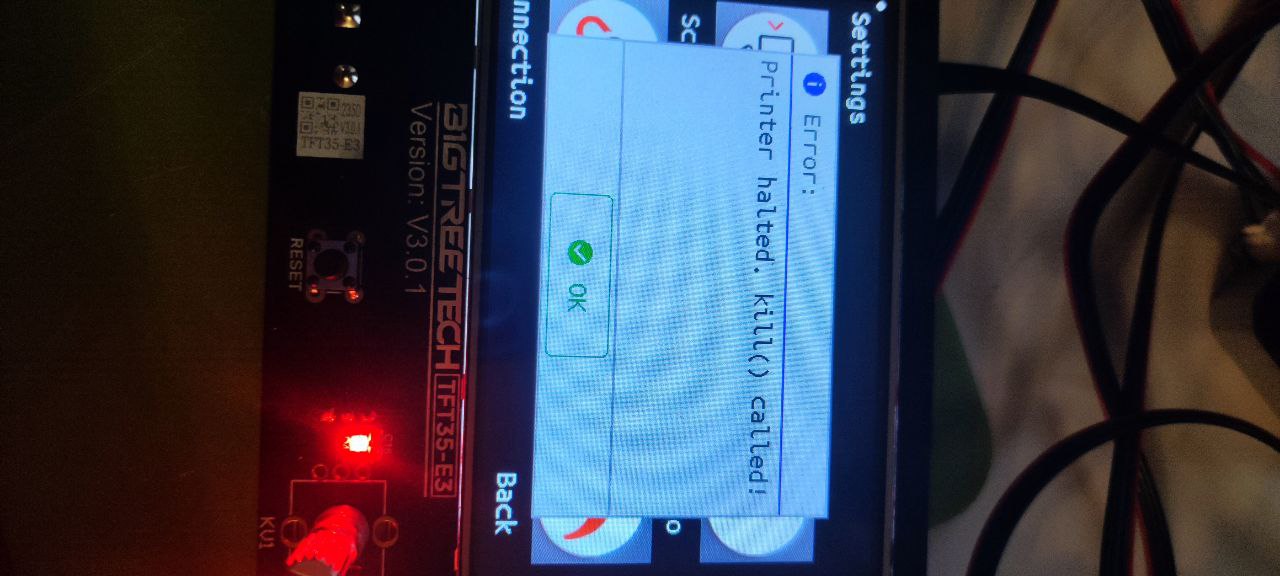
The touch mode has the same error " no printer attached".
The marlin mode and printrun-2.1.0_windows_x64_py3.10 can control the X0,Z,Y0 engines movement.
The COM settings are 115200/8/n/1
Yeah, M119s are next up- let’s make sure that M119s when to endstops are triggered look right, and then manually trigger each endstop and make sure with M119 that the correct endstop shows as triggered. From there we can fix whatever needs it and keep going with motion checkout.
So the idea is to move the machine so that non of the endstops are triggered, then do an M119. All should show OPEN.
Then manually activate each one (one at a time) and repeat the M119 command while it is activated to confirm that it does show TRIGGERED, and that the correct endstop is showing (you don’t want X2Min triggering when you activate XMin). You may need a helper, or a piece of tape to hold the switch while you are doing the M119.
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
x2_min: open
y_min: open
y2_min: open
z_min: TRIGGERED
>>> M119
SENDING:M119
Reporting endstop status
x_min: TRIGGERED
x2_min: open
y_min: open
y2_min: open
z_min: TRIGGERED
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
x2_min: TRIGGERED
y_min: open
y2_min: open
z_min: TRIGGERED
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
x2_min: open
y_min: TRIGGERED
y2_min: open
z_min: TRIGGERED
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
x2_min: open
y_min: open
y2_min: TRIGGERED
z_min: TRIGGERED
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
x2_min: open
y_min: open
y2_min: open
z_min: open
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
x2_min: open
y_min: open
y2_min: open
z_min: TRIGGERED
>>> M119
SENDING:M119
Reporting endstop status
x_min: open
x2_min: open
y_min: open
y2_min: open
z_min: open
as I have no touch plate yet, for Z axis I have used jumper on plate
Excellent, it looks like all of the endstops are working as expected.
The next step in testing for proper operation is to perform a manual move of each axis.
Set the gantry so that it is at least 6" (150mm) away from the endstops on the X and Y axis, and at least 1" (25mm) away from the endstops on the Z axis. Easiest to do this with the machine powered off (block the gantry in the Z position so the gantry doesn’t fall), then power the machine on and remove the blocking.
Then go to the MOVE menu on the TFT screen. Set the distance value to 1mm (any more and the machine can tear itself apart if any of the wires are reversed, any less and you won’t be able to see the movement).
Then do a MOVE X+ and MOVE X- command and verify that the machine moves in the correct direction. (watch carefully, 1mm isn’t a lot - do multiple moves in one direction if needed to detect movement)
Repeat the previous step for Y and Z axis. If you find that the motors are moving in opposite directions (nMin and nMax are moving away from each other), then reverse the connector at the SKR board for the motor that is moving the wrong way.
Once everything is working as expected, then change the MOVE distance to 10mm and move each axis back and forth the full distance of your build, but stay at least 10mm away from the endstop switches at this time. (You can use the 100mm selection for X and Y, but DO NOT use 100mm for Z)
Then once you have verified that everything can move freely for the full build volume, move to the HOME menu. Rather than hitting the HOME command in the HOME menu, I prefer to test each axis individually.
Press the X (should move to the left, stop, back off about 10mm, then move left again slowly until it stops.
Repeat for the Y axis (should move closer, back off, then closer again) and Z axis (should move up, then back down, then up again).
If at any time the machine doesn’t stop when expected (sometimes accompanied by a loud but harmless noise), check to see if the machine is actually hitting the endstop switch (may need adjustment).