So as stated in a previous post, the LR3 lives but now I’ve got two problems:
The end stops don’t seem to work.
I cannot connect to the machine via repetier host.
I can make the machine move around the table with the TFT knob but when I tell it to home any axis it will go home, but when the end stop engages it doesn’t want to stop and I can hear the stepper try to continue moving. I am not sure what the issue is, I have flashed the firmware V1CNC_SkrPro_DualLR_2209 to the board from the V1e page. I also plugged the spade connectors into the two end prongs of the end stop for all of them leaving the middle prong exposed. As for issue 2 when I attempt to connect the machine to my Macbook via the USB provided with the SKR Pro nothing happens. Repetier Host says no printer attached, or no printer found I can’t recall what exactly it says as I am away from my computer. Either way, it doesn’t connect.
Regarding Issue one It could be that I have plugged the end stops into the correct spot or maybe they are not plugged into the slot the entire way, no idea though as I know the end stop on the LR Core and the end stops on the gantry do not seem to work. I haven’t actually tried the Y axis end stops. I have pressed them in as far as I can but I did not hear or feel it click into position. Regarding issue 2, I haven’t the faintest clue to resolve it. I have seen in other posts asking what the M500 or M666 says, I have no idea how to view that information and would really like to find out how.
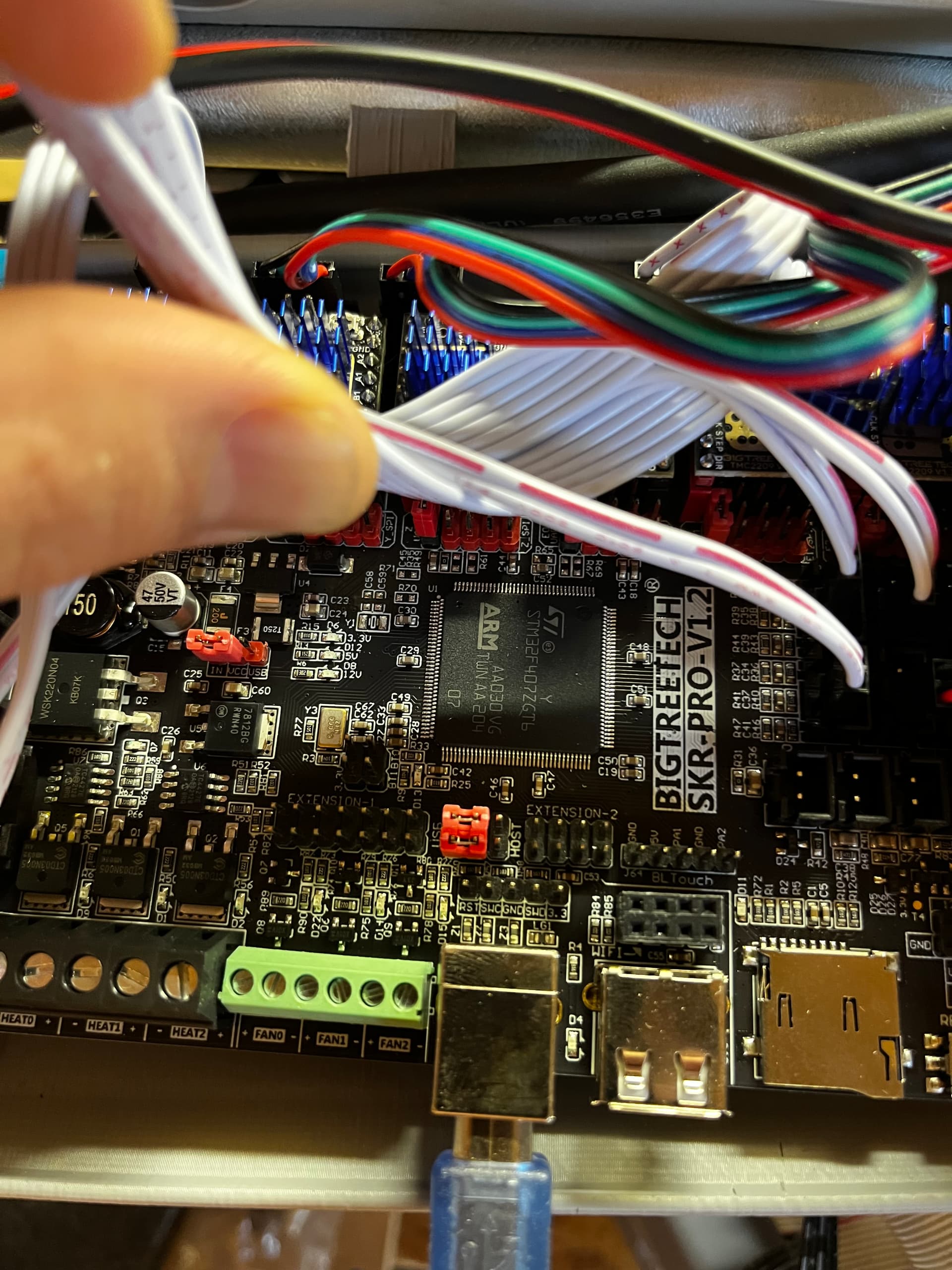
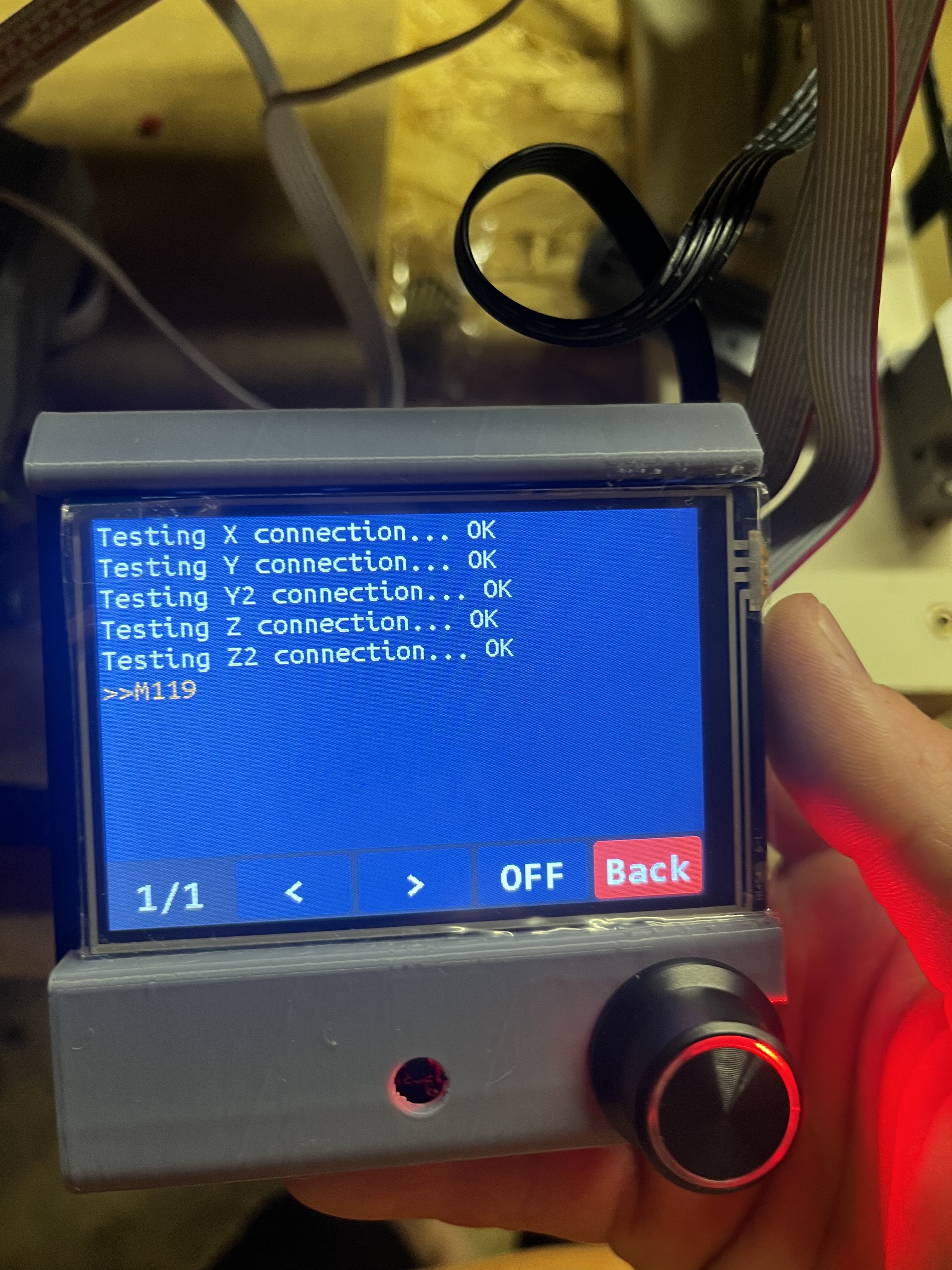
I have attached some photos that I hope will help.
Are you sure you have the right port? In Linux. i use dmesg on the command line to see what port it creates when I plug in the USB. Are you sure you are using 250000 baud rate? Make sure repetier server is not installed with repetier host.
Getting RH would really help, because you can see the results of M119. Thay will tell you which endstops are triggered. If it is homing at all, then they are wired NC (which is good). My first guess is that the Y1 motor is hitting the Y2 stop, which stops Y2 and Y1 just keeps going. That is easier to diagnose with M119.
I apologize, but what do you mean by right port? The physical port I plug the cable into the board with? If so I was using the semi-circular one next to the standard USB port. If you mean something else then could you please elaborate? I did switch to a 250000 baud rate, as I saw that suggested to other people having trouble. However now that I think about it when I switched to that rate I didn’t restart the program, I am not sure it that would matter or not.
I double checked and I did download Repetier-Host.
As for the end stops, the one on the LR core is not currently working and the two on the gantry that get engaged when the gantry goes up are also not working (I believe those are the Z axis?) I guess now that I think of it, I haven’t tried the Y axis yet.
I don’t own the SKR Pro/TFT setup, but from the writings on the forum, doesn’t the TFT have a terminal mode? If so, could he use that mode for acquiring M119 data?
Also, hypothetically if they don’t change what should I look for? If they are working, then what should I do to make the machine actually “listen” to them?
The terminal is in the touchscreen menu. I would check they’re working and check they are in the right place- ie if you press the left Z endstop that’s the one that triggers not the right one.
If they change state from checking with m119 they should work when triggered during homing. Endstops don’t stop motion if you just use movement commands.
Yeah when I was homing I saw that the end stops had issues. The Z axis would go the whole way up, engage the end stops and then continue to try going up. Same thing for the X axis on the LR Core.
If the M119 doesn’t show a change, you have a wiring problem with the cables, switches, or connections at the controller board.
I found that the wiring is not always as continuous as I expected from the switch to the board. I needed to “ring” (continuity test) each wire to find the one that was broken. As you’re puling wires through sleeves and around corners it’s amazing how fragile they are.
I also needed to replace a switch. Even though they are simple they are not foolproof. Check that the NC connections actually open when the switch is actuated.
Review the diagram for the place on the board where the end stop wires connect. I kept pulling them off when I closed the case. I ended up removing the plastic shield/guides around the pins and that let them seat more securely.
Re: USB issue - I recently re-discovered that some USB cables can carry data as well as power, while others can only carry power. Three hours of troubleshooting my new Ender 3 printer later, I tried a different cable and everything worked fine!
So if your computer doesn’t recognize that a device is connected, then maybe try a cable that you know can connect to other devices.
If, as I expect, you are using a V1 maintained version of Marlin, it is set up for normally closed switches, and TRIGGERED will mean an open connection. For the TRIGGERED switches, you either have a disconnect in the wiring, or you wired the switches normally open rather than normally closed.
So now the end stops seem to work, I unplugged and replugged them in. However the Z2 switch isn’t working properly. It seems to be telling the machine that it’s touching the end stop and that side won’t home but the other side does. It’s not the stepper because I can make it go up and down just fine with movement control.
But now I can’t get out of marlin mode to go back and look at the terminal
You may already be doing this, but you hold the knob down for a few seconds to switch modes. As for Z2, if it is not moving, the firmware thinks it is TRIGGERED.
So I swapped the Z2 end stop wire on the SKR into the Z1 slot and now the Z2 that wouldn’t move when homing does and now the Z1 won’t. So maybe the issue lies with the Z2 spot on the board.
When I go to home the Z axis again the side that wasn’t moving (Z2) does now. However it won’t stop once it hits the switch. When the Z1 end stop was hooked into the Z1 slot on the board it would hit the end stop and quit as intended.