Maybe take a video of where and when it happens, and post it here.
Any time mine has gone off course, it was because it was physically getting caught on something (mill or core hitting hold down screws, vacuum hose catching core rollers, etc.)
Also try doing an air cut a mm or so higher than the stock, and see what happens
i have an skr pro board connected via usb to an i5 nuc running repetier server. im loading the file to the server and then running it. but i had the same issue when my laptop was connected directly to the board running host. I assumed at the time it was my laptop so i loaded up a spare nuc.
Load the gcode to the SD card and put it in the SKR.
The lowrider is a flying controller (It moves around, to use a remote cabled sender you need a long USB cable and the cable chain sees lots of motion and also ESD issues from the router / chips / dust extraction).
My opinion is that a cable-attached sender is a bad idea for a flying controller. If you want the convenience of a remote sender, you might consider using an ESP01 on your SKR.
When designed for intermittent/unreliable interfaces, it’s done the way FluidNC does it with their pendant, where every line of communication is presumed to fail and thus any corrupt line does not ruin the utility of the remote interface. Since Marlin doesn’t work this way, the next best thing is to use something like the ESP01 to keep the files local to the SKR but still let you remote control starts/stops and job related itms.
Ryan used to sell ESP-01s in the shop for SKRs, but that may have been overcome by the release of the Jackpot.
They’re really easy to load. There’s a thread about it here:
I think it’s possible to upload the g code over WiFi through that ESP-01, but it’s so slow that it would be faster to just pull the SD card, put your new gcode on the card, and the put the SD card back in the SKR.
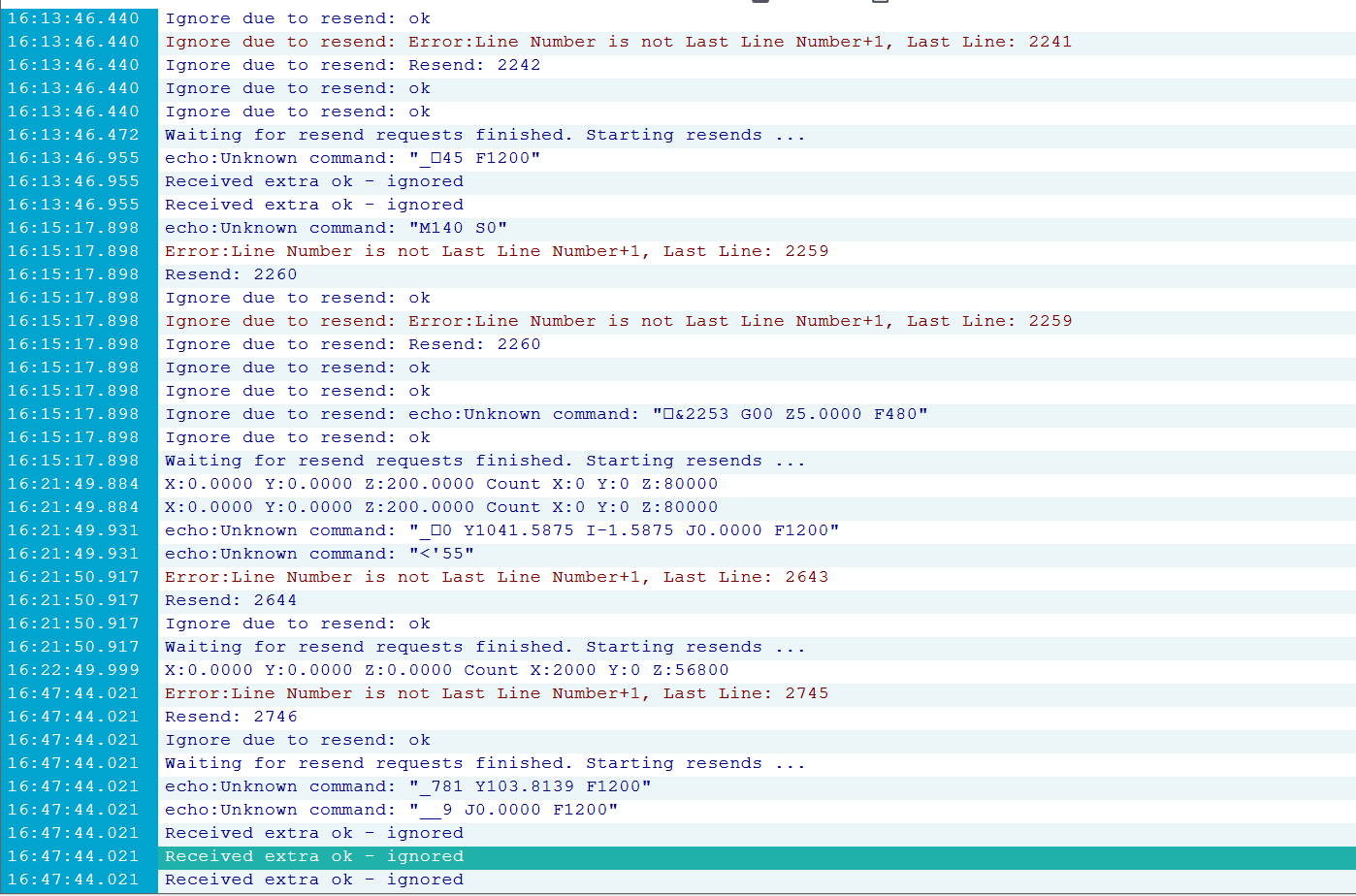
Turning on ping pong on repetier server removed all errors on sending gcode. I had originally let repetier server detect its own settings, i tweaked them a little and now it works fine.