board: None
name: Default (Test Drive)
meta:
stepping:
engine: RMT
idle_ms: 255
pulse_us: 4
dir_delay_us: 0
disable_delay_us: 0
segments: 12
spi:
miso_pin: NO_PIN
mosi_pin: NO_PIN
sck_pin: NO_PIN
sdcard:
cs_pin: NO_PIN
card_detect_pin: NO_PIN
frequency_hz: 8000000
kinematics:
Cartesian:
axes:
shared_stepper_disable_pin: NO_PIN
shared_stepper_reset_pin: NO_PIN
homing_runs: 2
x:
steps_per_mm: 80.000000
max_rate_mm_per_min: 1000.000000
acceleration_mm_per_sec2: 25.000000
max_travel_mm: 1000.000000
soft_limits: false
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
null_motor:
y:
steps_per_mm: 80.000000
max_rate_mm_per_min: 1000.000000
acceleration_mm_per_sec2: 25.000000
max_travel_mm: 1000.000000
soft_limits: false
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
null_motor:
z:
steps_per_mm: 80.000000
max_rate_mm_per_min: 1000.000000
acceleration_mm_per_sec2: 25.000000
max_travel_mm: 1000.000000
soft_limits: false
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 1.000000
null_motor:
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
fault_pin: NO_PIN
estop_pin: NO_PIN
coolant:
flood_pin: NO_PIN
mist_pin: NO_PIN
delay_ms: 0
probe:
pin: NO_PIN
toolsetter_pin: NO_PIN
check_mode_start: true
hard_stop: false
macros:
startup_line0:
startup_line1:
Macro0:
Macro1:
Macro2:
Macro3:
after_homing:
after_reset:
after_unlock:
start:
must_home: true
deactivate_parking: false
check_limits: true
parking:
enable: false
axis: Z
target_mpos_mm: -5.000000
rate_mm_per_min: 800.000000
pullout_distance_mm: 5.000000
pullout_rate_mm_per_min: 250.000000
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
digital4_pin: NO_PIN
digital5_pin: NO_PIN
digital6_pin: NO_PIN
digital7_pin: NO_PIN
user_inputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
digital4_pin: NO_PIN
digital5_pin: NO_PIN
digital6_pin: NO_PIN
digital7_pin: NO_PIN
arc_tolerance_mm: 0.002000
junction_deviation_mm: 0.010000
verbose_errors: true
report_inches: false
enable_parking_override_control: false
use_line_numbers: false
planner_blocks: 16
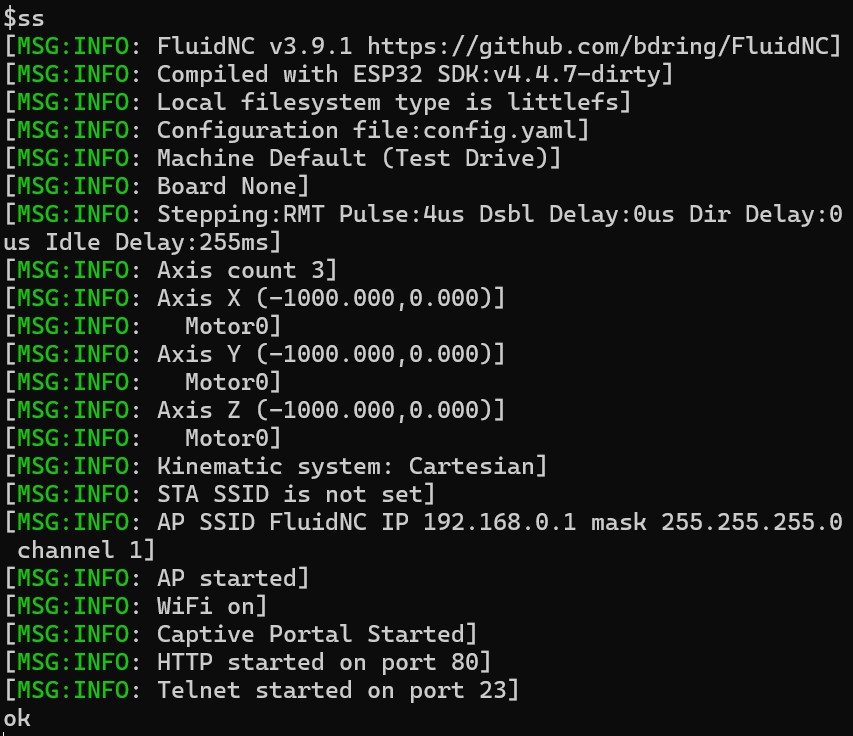
Screenshot is after erasing and reinstalling v3.9.1.
I plugged in the Z axis first and was thrilled to see movement when using the wifi controls. Added X and Y axes and had fun moving them around manually. I switched to a different laptop and everything stopped working until I realized my VPN was messing with the connection. Since playing with the homing buttons, I lost each axis one by one. They are now locked and warm to the touch. Any ideas?