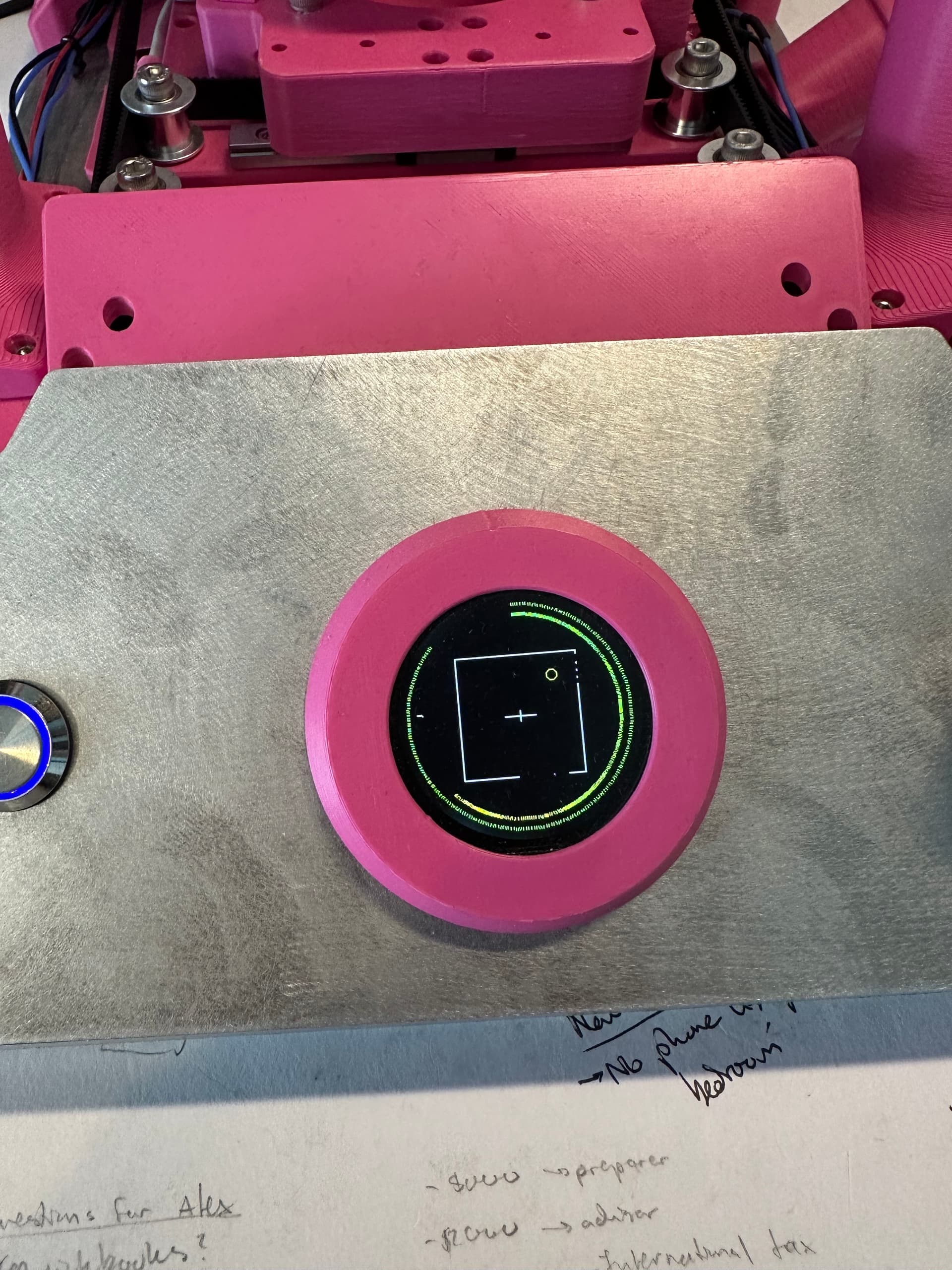
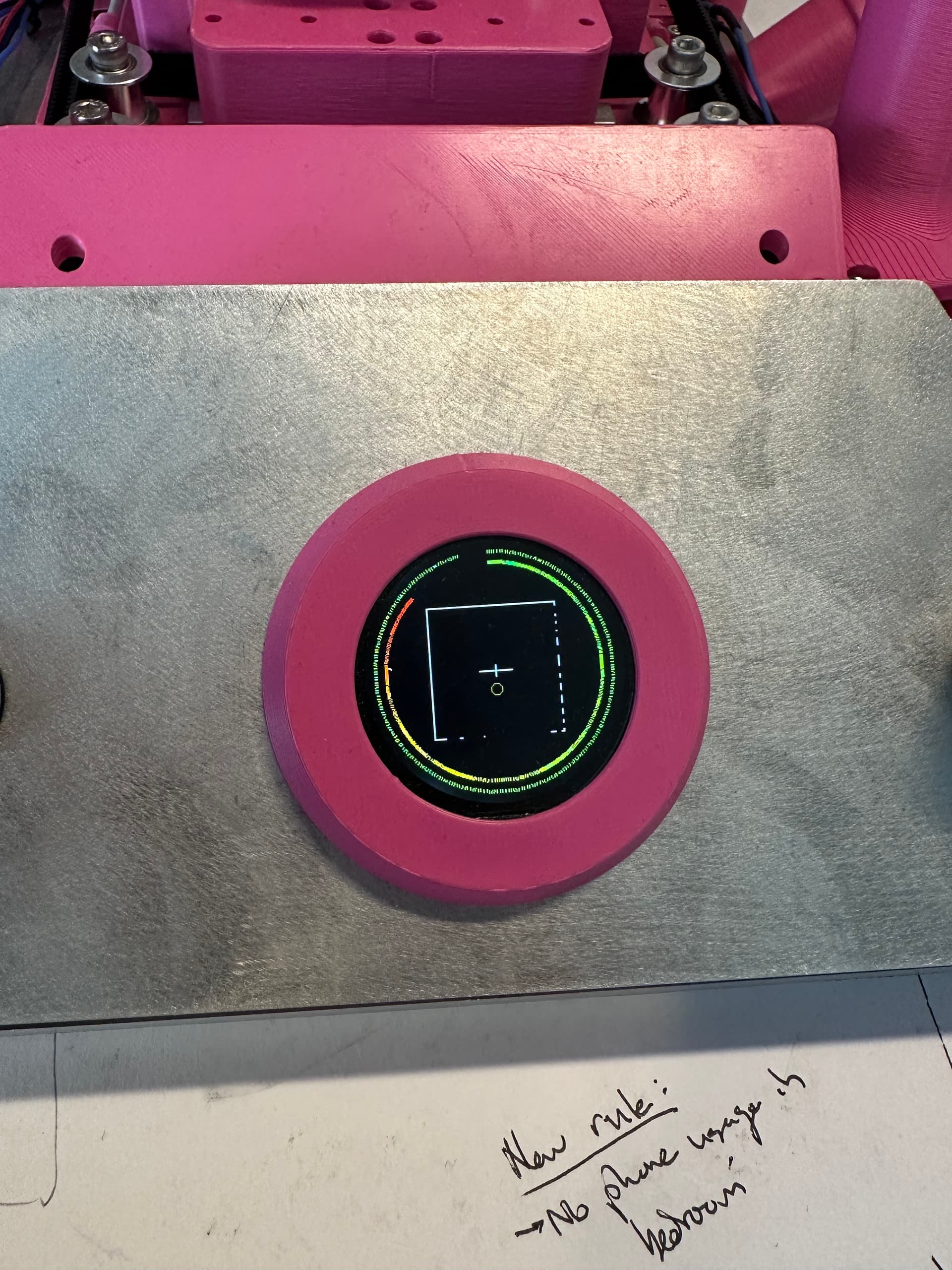
I added another “loading bar” to the display to show how far the machine has moved, which should relate directly to how much error has accumulated.

There are a couple config.h options you can mess with to tailor this a bit:
const float driftRate = 0.001; // drift rate of positioning (unitless, drift per distance traveled - measured)
const float maxDrift = 1; // maximum acceptable drift (mm)
It’s currently set to an accuracy (or drift rate) of 0.1% per distance traveled. The maxDrift is set to 1mm, which would essentially be your acceptable tolerance. Reaching this value doesn’t currently do anything (it just shows a tick mark which the user can reference), but I’d like to incorporate a little prompt that shows options like “reset zero, continue, abort”.
This has seemed to be working pretty well for me. I will give some more updates and videos soon.