Okay, I’m stuck.
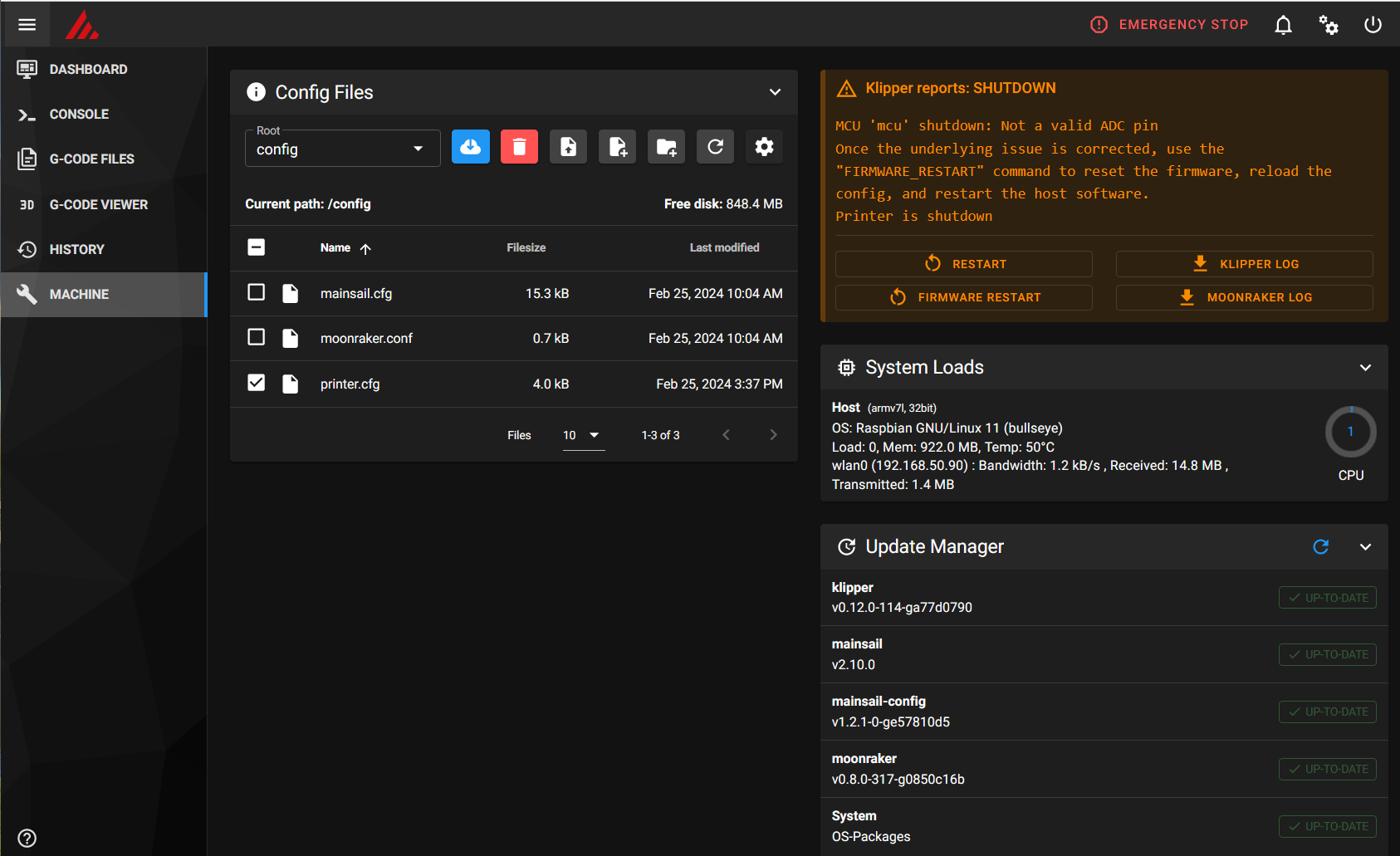
“MCU ‘mcu’ error during config: Not a valid ADC pin”
I have a slimmed down bear bones config, I have verified my inputs a dozen times. Is there any way to know what pin is does not like??
Okay, I’m stuck.
“MCU ‘mcu’ error during config: Not a valid ADC pin”
I have a slimmed down bear bones config, I have verified my inputs a dozen times. Is there any way to know what pin is does not like??
I have a thermistor in the plug, I have tried jumpers on the endstop pins, the BL touch is correct I am 99.9999% sure.
one of the pins you have selected isn’t correct. Is there any more to that message?
can you share your printer.cfg file?
Post your printer.cfg and your klippy.log
I tried both of your configs with edits and then kept editing one down to bear bones.
I feel like I am missing something dumb.
Nothing more to the error, the klippy log doesn;t seem to have anything worthy but I will get a clean one for you .
[include mainsail.cfg]
###############################################################################################################################################
# MCUs -> STM32F407
########################################
[mcu]
serial: /dev/serial/by-id/usb-Klipper_stm32f207xx_1F003C000147313335343635-if00
[virtual_sdcard]
path: /home/Ryan/printer_data/gcodes
on_error_gcode: CANCEL_PRINT
# Enable arcs support
[gcode_arcs]
resolution: 0.1
### Printer ###
[printer]
kinematics: corexy
max_velocity: 1000
max_accel: 4500
max_z_velocity: 100
max_z_accel: 800
### Steppers ###
[stepper_x]
step_pin: PE9
dir_pin: PF1
enable_pin: !PF2
microsteps: 16
rotation_distance: 31.86 # Original 32, Changed to ~~31.85 (Average between X&Y from CaliFlower Test)~~ Changed to 31.86 after Calilantern Test
endstop_pin: PB10
position_endstop: 0
position_max: 298
homing_speed: 50
[stepper_y]
step_pin: PE11
dir_pin: PE8
enable_pin: !PD7
microsteps: 16
rotation_distance: 31.86 # Original 32, Changed to ~~31.85 (Average between X&Y from CaliFlower Test)~~ Changed to 31.86 after Calilantern Test
endstop_pin: PE12
position_endstop: 0
position_max: 295
homing_speed: 50
[stepper_z]
step_pin: PE13
dir_pin: PC2
enable_pin: !PC0
microsteps: 16
rotation_distance: 32
endstop_pin: probe:z_virtual_endstop
position_min: -5
position_max: 385
homing_speed: 30
second_homing_speed: 10
[stepper_z1]
step_pin: PE14
dir_pin: PA0
enable_pin: !PC3
microsteps: 16
rotation_distance: 32
#endstop_pin: probe:z_virtual_endstop
#position_min: -5
#position_max: 385
[stepper_z2]
step_pin: PD15
dir_pin: PE7
enable_pin: !PA3
microsteps: 16
rotation_distance: 32
#endstop_pin: probe:z_virtual_endstop
#position_min: -5
#position_max: 385
[extruder]
step_pin: PD13
dir_pin: PG9
enable_pin: !PF0
microsteps: 16
rotation_distance: 3.43
nozzle_diameter: 0.400
filament_diameter: 1.750
heater_pin: PB1
sensor_type: Honeywell 100K 135-104LAG-J01
sensor_pin: PF4
#control: pid
#pid_Kp: 14.747
#pid_Ki: 0.660
#pid_Kd: 82.402
min_temp: 0
max_temp: 300
max_extrude_cross_section: 250
max_extrude_only_distance: 250
control = pid
pid_kp = 13.974
pid_ki = 0.498
pid_kd = 97.991
### TMC2209 ###
[tmc2209 stepper_x]
uart_pin: PC13
#tx_pin: PE4
#uart_address: 0
run_current: 1.000
stealthchop_threshold: 0
[tmc2209 stepper_y]
uart_pin: PE3
#tx_pin: PE2
#uart_address: 0
run_current: 1.000
stealthchop_threshold: 0
[tmc2209 stepper_z]
uart_pin: PE1
#tx_pin: PE0
#uart_address: 0
run_current: 0.800
stealthchop_threshold: 99999
[tmc2209 stepper_z1]
uart_pin: PD4
#tx_pin: PD2
#uart_address: 0
run_current: 0.800
stealthchop_threshold: 99999
[tmc2209 stepper_z2]
uart_pin: PD1
#tx_pin: PD0
#uart_address: 0
run_current: 0.800
stealthchop_threshold: 99999
[tmc2209 extruder]
uart_pin: PD6
run_current: 0.650
stealthchop_threshold: 99999
### TMC Autotune ###
#[autotune_tmc stepper_x]
#motor: zyltech-17hd48002h-22b
#[autotune_tmc stepper_y]
#motor: zyltech-17hd48002h-22b
#[autotune_tmc stepper_z]
#motor: zyltech-17hd48002h-22b
#[autotune_tmc stepper_z1]
#motor: zyltech-17hd48002h-22b
#[autotune_tmc stepper_z2]
#motor: zyltech-17hd48002h-22b
#[autotune_tmc extruder]
#motor: dfh-14mcrn-1848
### Fan's ###
[fan]
pin: PC8
[heater_fan hotend_fan]
pin: PE5
heater: extruder
heater_temp: 50.0
### BLTouch ###
[bltouch]
sensor_pin: ^PA2
control_pin: PA1
z_offset: 2.600
stow_on_each_sample: false
probe_with_touch_mode: true
x_offset: 0
y_offset: -34
speed: 10
lift_speed: 20
samples: 2
#sample_retract_distance: 10
samples_tolerance_retries: 4
### Z Safe Home ###
[safe_z_home]
home_xy_position: 150, 185
speed: 150
z_hop: 10
z_hop_speed: 20
### Z Tilt ###
[z_tilt]
z_positions: 0, 25
300, 25
150, 300
points: 10, 50
280, 50
150, 295
speed: 125
horizontal_move_z: 10
retries: 8
retry_tolerance: 0.01
### Bed Mesh ###
[bed_mesh]
speed: 125
horizontal_move_z: 10
mesh_min: 10, 40
mesh_max: 295,260
probe_count: 5, 5
algorithm: bicubic
bicubic_tension: 0.2
fade_start: 1
fade_end: 10
fade_target: 0
That might have an odd therm in it, I tried them all.
klippy(3).zip (5.2 KB)
Your getting a MCU Error on connect according to the log. I don’t see anything odd in your config. As long as your PIN numbers are correct. Mine uses different pins for the hotend since I’m running canbus
Have you done a save and restart previous to this that worked? If so what was the last thing you changed that made it stop working??
I’m going to pull up the sample config and compare to see if I can find anything odd. Damn I wish I was home with all my stuff already downloaded and ready lol.
I’m going to move the BL touch sensor pin, it is the only thing that does not match my marlin builds. Moving it to Z-, PG8
It has not moved yet. I waded through all the errors and now this is the last one. So you are saying it is not even fully connected? I can try another USB cable.
You shouldn’t need to move the bltouch pin. As long as it’s labeled right you should be good.
Post a pic of the red error you get after a restart
You pulled the tmc2209 stuff from my config? I have mine plugged in X Y Z Z1 Z2 on the board. Then you will have to used the next one as E, mine is plugged into the canbus board. Just verifying you are using the same order
Really is a bummer it does not give a more specific error. Although I only have 4 ADC pins.
Yup, I only have 2 steppers actually plugged in though, do they all need to be?
Double check your sensor type. It can throw that error if it’s expecting something different
Mine is for the h2 V2s lite. Idk if the one you are using now has a different sensor or not
As in thermistor? I tried them all and googled the one I have. I put a meter on it as well to verify it is working.
Maybe I have a bad skr…
Ok try moving it to a different thermistor port. Just change the PIN number. Doesn’t matter which one as long as you put the correct pin number