vicious1
January 3, 2024, 11:46pm
21
Before we send it back do you want to try and pry off the header of the bad driver jackpot socket and see if the pins are funky?
They are kind of hard to get moving but once you do it comes on and off. I am wondering if that pins is just not making contact. I had one last week that did not enable, the pin missed the header socket.
No obvious solder blobs or anything on the bottom?
Hammy
January 3, 2024, 11:57pm
22
Pins all look good and the soldering looks good as well. Its nearly Midnight here so I will have to stop for the night. If you think of anything overnight let me know. It will be a real pain if i need to send this back from Scotland.
1 Like
vicious1
January 4, 2024, 12:03am
24
We can swap Y1 to the C port no problem. If you ever need a 6th driver we can deal with it then.
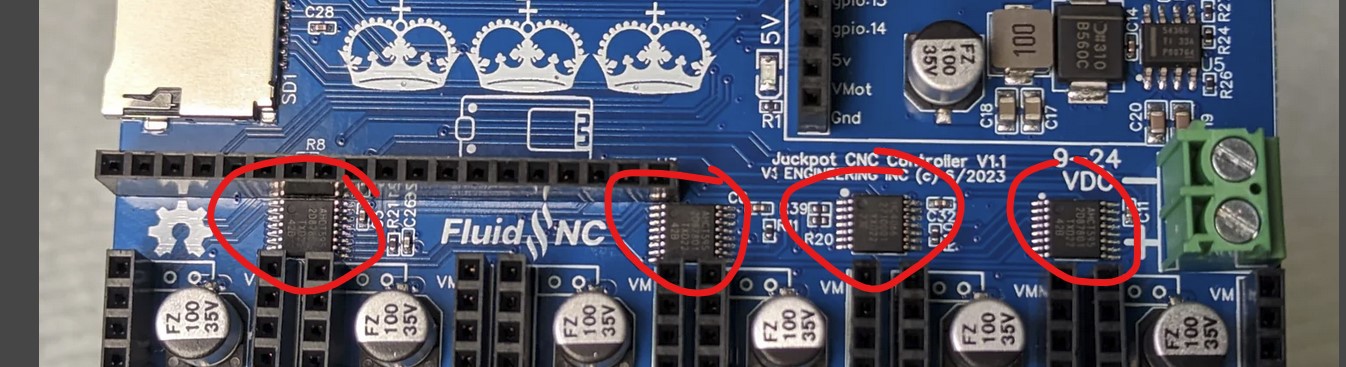
Solder blobs on the 4 little chips above the drivers is the only other thing I can think of.
Hammy
January 4, 2024, 12:08am
25
I don’t have an issue using the C port if it can be re-configured. Not sure where I am looking for the solder blobs you mentioned.
vicious1
January 4, 2024, 12:38am
26
We can set you up to reflash it as well, just in case.
The blob would be on these
I am going to be gone tomorrow so don’t think I am ignoring you please. I will check back in as soon as I can.
There are others around who will try to help as well with troubleshooting.
1 Like
Hammy
January 4, 2024, 8:06pm
29
Thanks for the help. I just tried using a Windows Laptop with the Web GUI but got same result. I have had problems with MACs and NC controllers before.
Well, it looks like the next step to try and fix things for you will be to build you a configuration file that uses the C stepper location for the Y1 driver. I’ll make an attempt to do this for you, but am going to do this on the fly starting as soon as I send this reply.
I’ll start with the LowRider config since that’s what is shown in yourr $ss output above. You’ll need to put that configuration on your board and we can try again.
My next reply will have what we want to test with.
Hammy:
Thanks for the help
OK, we need to change your config.yaml file to be like the file shown below:
board: Jackpot TMC2209
name: LowRider
meta: 04 January 2024 MakerJim
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 3
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#X
motor0:
limit_neg_pin: gpio.25:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: I2SO.1
step_pin: I2SO.2
disable_pin: I2SO.0
y:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 2440
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#C
motor0:
limit_neg_pin: gpio.33:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
# NOTE: changed to use the C driver position!
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.22
r_sense_ohms: 0.110
run_amps: .1
hold_amps: 0.050
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.21
direction_pin: I2SO.20
disable_pin: I2SO.23
#A
motor1:
limit_neg_pin: gpio.35:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 1200.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 300.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 0
feed_mm_per_min: 300.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 2
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
#B
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.19
r_sense_ohms: 0.110
run_amps: 0.680
hold_amps: 0.500
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
# c:
# steps_per_mm: 80.000
# max_rate_mm_per_min: 5000.000
# acceleration_mm_per_sec2: 100.000
# max_travel_mm: 300.000
# soft_limits: false
# homing:
# cycle: 0
# positive_direction: true
# mpos_mm: 150.000
# feed_mm_per_min: 100.000
# seek_mm_per_min: 800.000
# settle_ms: 500
# seek_scaler: 1.100
# feed_scaler: 1.100
#
# motor0:
# limit_neg_pin: gpio.39:low
# limit_pos_pin: NO_PIN
# limit_all_pin: NO_PIN
# hard_limits: false
# pulloff_mm: 3.000
# tmc_2209:
# uart_num: 1
# addr: 3
# cs_pin: i2so.22
# r_sense_ohms: 0.110
# run_amps: .1
# hold_amps: 0.050
# microsteps: 16
# stallguard: 0
# stallguard_debug: false
# toff_disable: 0
# toff_stealthchop: 5
# toff_coolstep: 3
# run_mode: StealthChop
# homing_mode: StealthChop
# use_enable: false
# step_pin: I2SO.21
# direction_pin: I2SO.20
# disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: NO_PIN
digital3_pin: NO_PIN
#Laser:
# pwm_hz: 5000
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# tool_num: 0
# speed_map: 0=0.000% 255=100.000%
# off_on_alarm: true
# pwm:
# pwm_hz: 5000
# direction_pin: gpio.26
# output_pin: gpio.27
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: false
# 5V out gpio.26/27
# VMot out gpoi.2/16
# In's left to right gpoi.25/33/32/35/34/39/36
The change swaps the C driver in place of the Y driver for this config.
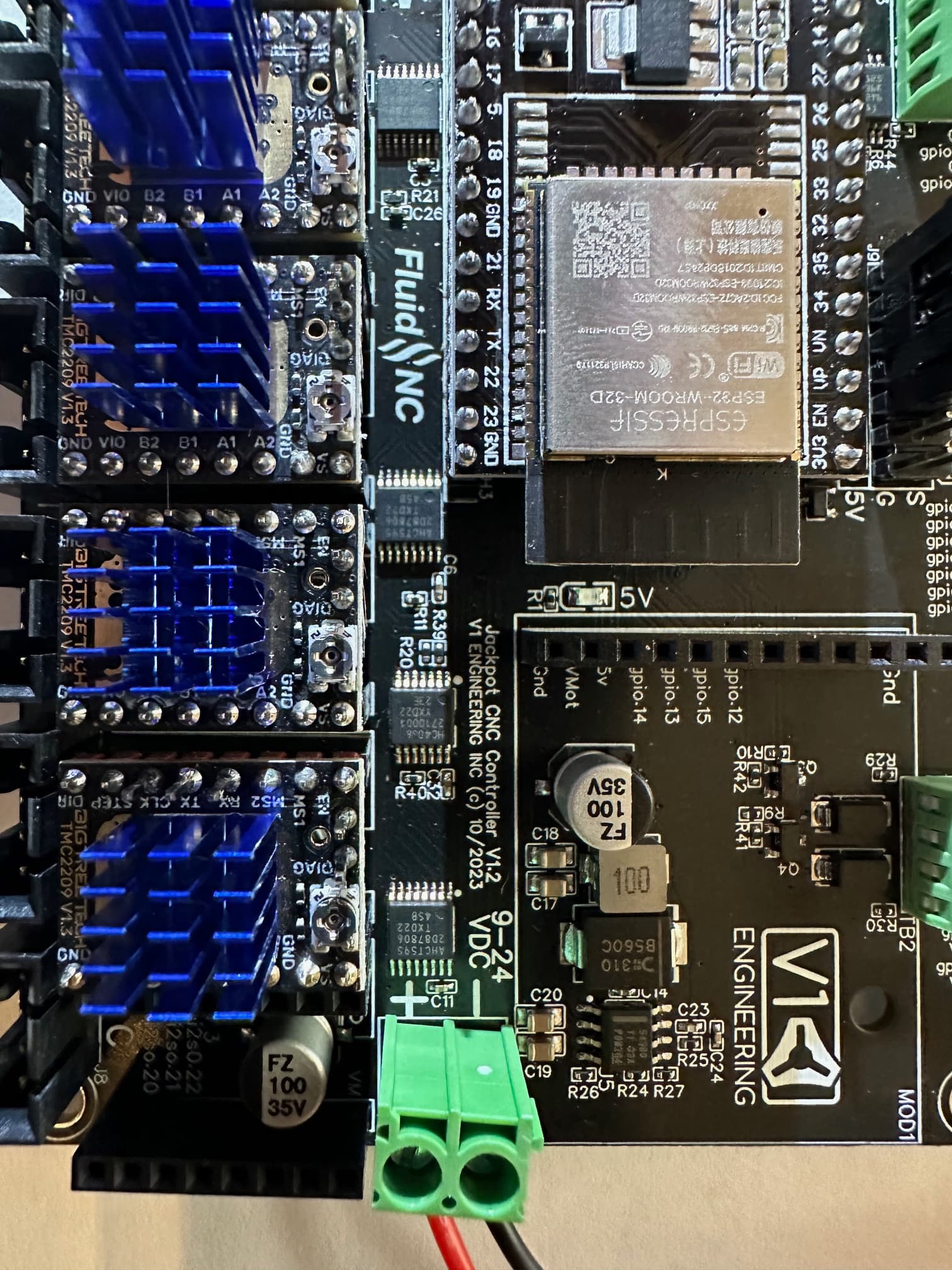
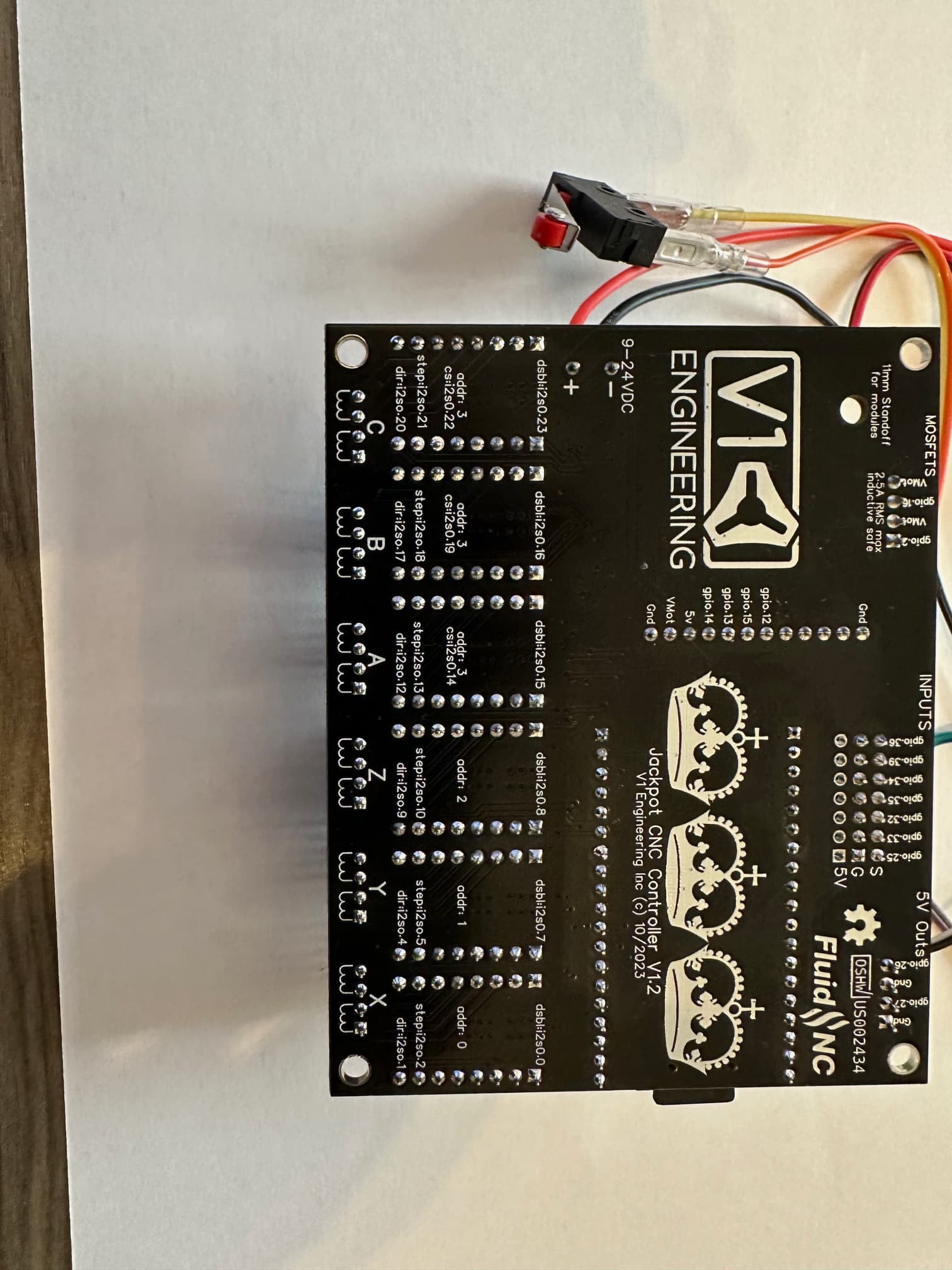
Edit to add : you’ll need to power off the jackpot, and move the Y1 TMC2209 stepper driver from the Y position to the C position on your board, and plug the Y1 motor in at the C stepper motor location.
2 Likes
One last note - I’d still like to see close up pictures of the ICs that Ryan identified above, and also of the solder work on the Y stepper driver headers on the back side of the board.
Britt
January 5, 2024, 5:06am
33
@vicious1 @MakerJim
MakerJim:
microsteps: 16
For some reason the C motor is set to 16 microsteps. It needs to be changed to 8.
1 Like
Good catch, thank you.
1 Like
Hammy
January 5, 2024, 7:17am
35
Thanks everyone for the help. Just so you are aware there is a 6-8 hour time difference so I am not ignoring your responses. They just arrive during the night. I will make the changes you requested when I get back from work and let you know the outcome. I will also supply the requested photographs.
1 Like
Hammy
January 5, 2024, 3:50pm
38
I have updated the yaml file and moved the driver and I now have all steppers moving in both + and - directions.
Thanks to everybody who helped.
I have a couple of questions now that we have made the change.
Does this mean I won’t be able to get any firmware upgrades as they are not expecting Y1 to now be at C?
I noticed the end stops run in the same order as the steppers . Do I need to move Y1 end stop into the spare slot next to the probe.
I would appreciate any feedback on the photographs requested. I can’t see anything but I’m new to this.
Hopefully I will have this all built over the weekend.
1 Like
Firmware upgrades do not affect the config.yaml.
You can apply future firmware upgrades, and as long as you use this same config file, it will still work the same.
1 Like
Hammy
January 5, 2024, 3:58pm
40
Thanks Mike, one less problem to deal with.
1 Like