I’ve got a question about using the jackpot board to power external steppers. I want to use a jackpot board to retrofit a previous CNC that was running on mach 3. I’m thinking I can just plug the drivers into the jackpot board, give configuration, and move right along.
It does not have the screw terminals, but I’m assuming I can just connect to the pins in the same way? The signals will be the same? Would I be better off just getting 6x CNC Controller for FluidNC from Bart Dring on Tindie?
I was thinking the jackpot represented the latest and greatest evolution of the form, so that’s the one to get, but I just want a good fluidnc board that can support external drivers.
Direction step and enable are broken out, I don’t think you need anything other than that from the board. That should be fine, unless you need something else.
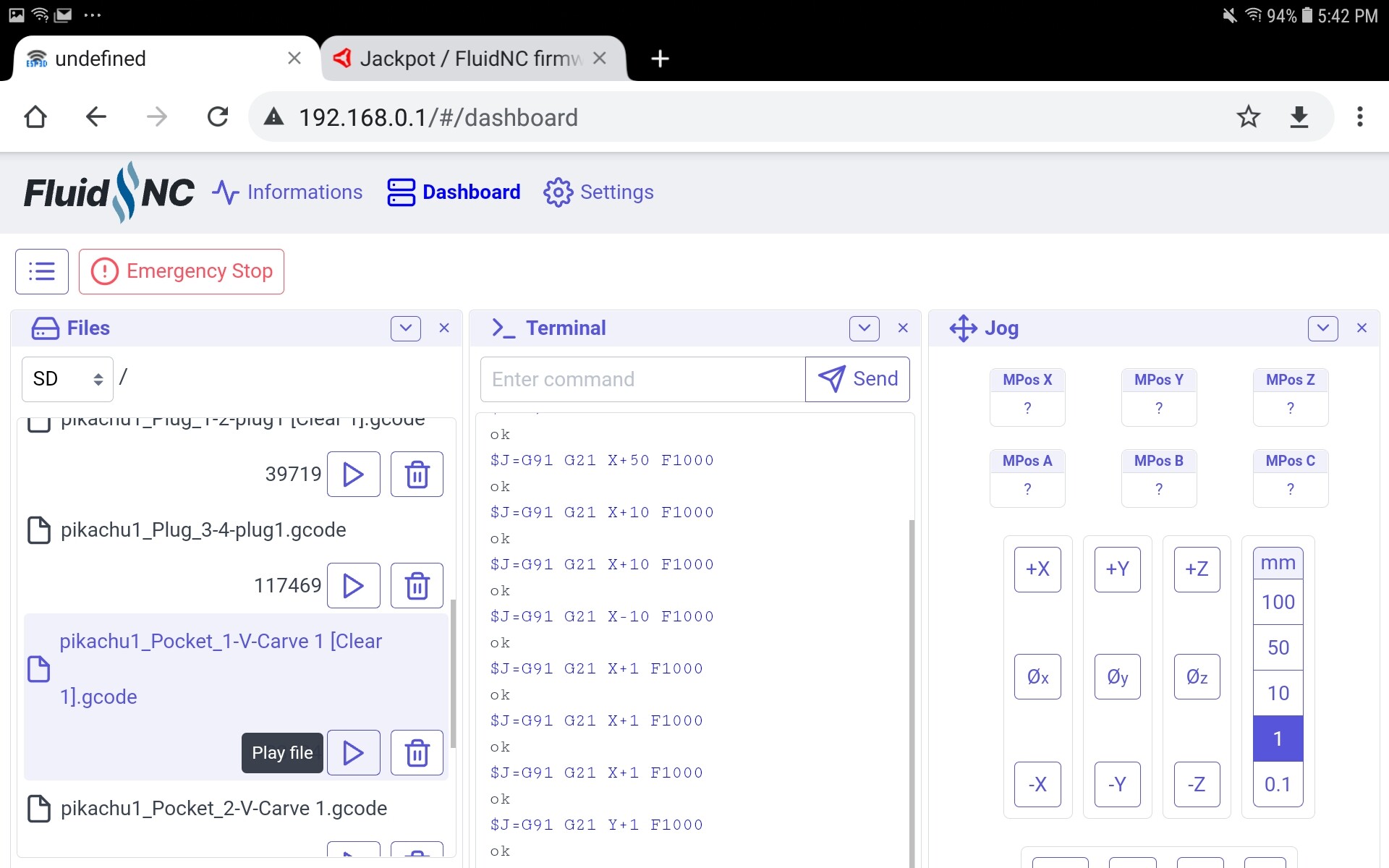
I did some cutting this weekend with WebUI3. The good news is it was pretty uneventful. Things seem to work as expected. The jog buttons are a nice size so you don’t have to zoom in to prevent fat-fingering. There is a home-all button on the jogging section that will home X and Y which is nice. The one thing I could not find is a resume button. My G-code pauses to attach and then remove the touch plate and I had to send a “~” command to resume. I did have my Z do some strange things. There are only one set of coordinates displayed on the screen and I am not sure if they are machine or workspace coordinates. My Gcode moves up to z=20 to attach the touch plate. One time this caused it to go up too far and one time it sank into my spoilboard. I think I need to change this to a relative move instead of absolute. In the old interface I could tell where I was in Z before running a job and I don’t remember ever having my Z be off by 20 or 30mm like it was in this case. Maybe it is not zeroing on startup? I still haven’t figured out (or looked into) the macro’s. Can anyone point me to a link of how the macros are implemented?
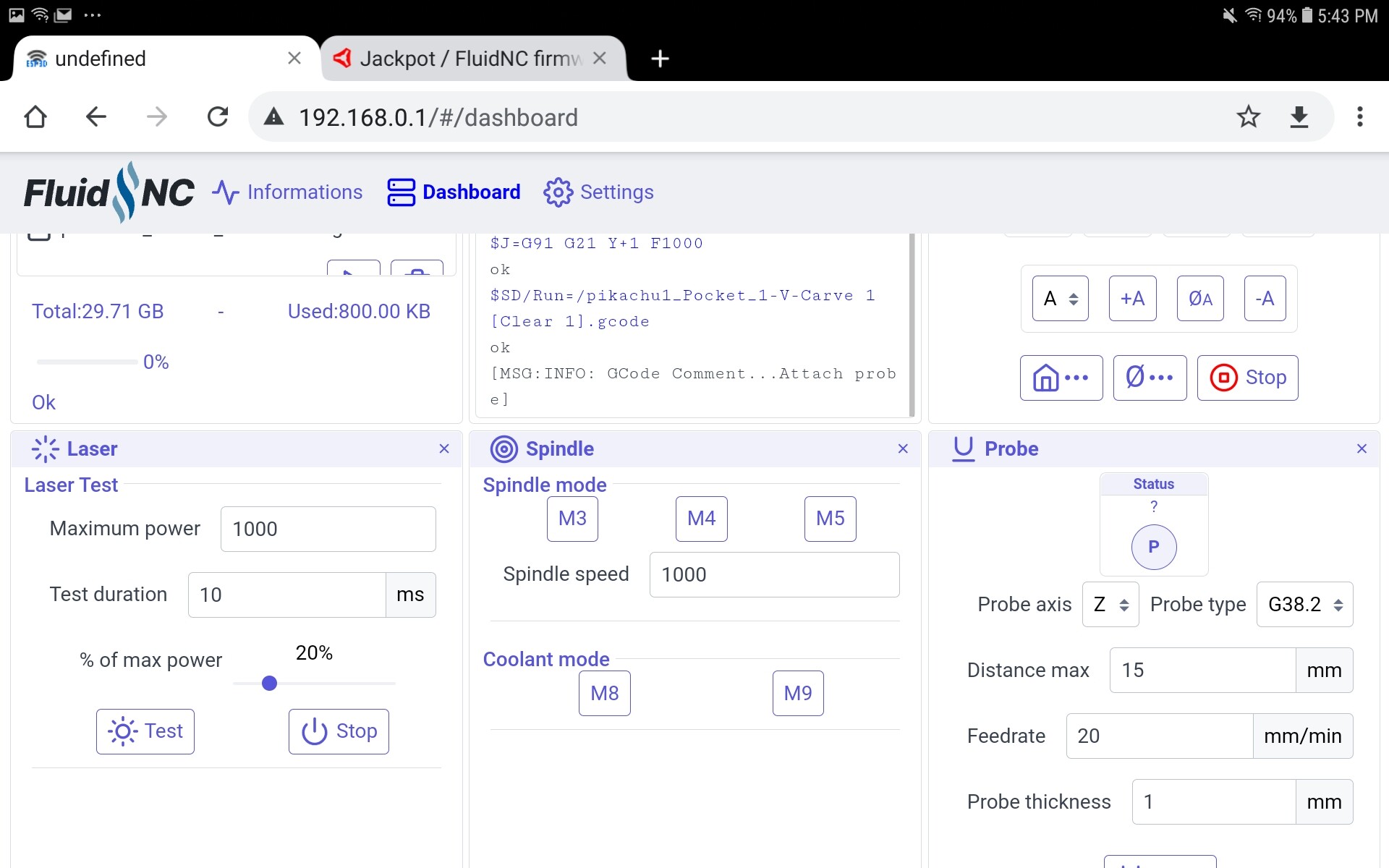
Here is a screenshot of the display right after I started the job and it is waiting for me to attach the probe. Before this I homed x and y. There are still ? On the coordinates and only one set of coordinates. In the status section there is a pause button, but it only sens the ! Not the ~ to resume.
Wow, you will probably finf this funny, but I didnt see the interface settings page before. Amazing. I enabled poling, and changed the command to ?, but it is giving me a flag. Any ideas?