On the SKR 1.4 turbo you probably have marlin installed so to home send a G28.
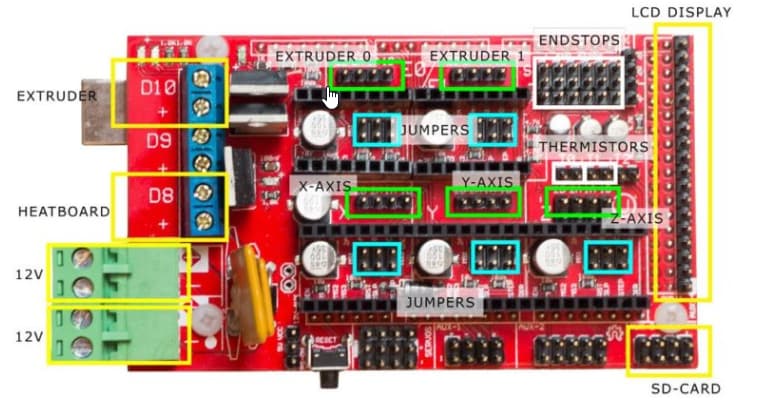
In RAMPS, µCNC has the following default configuration out of the box:
Extruder0 will be your second X axis stepper
Extruder1 will be your second Y axis stepper
X+ Endstop will be your X2 endstop
Y+ Endstop will be your Y2 endstop
Z+ Endstop will be your Probe endstop
All other endstops and motors should be the usual.
Download the latest release source code (v1.5.2) and unzip it.
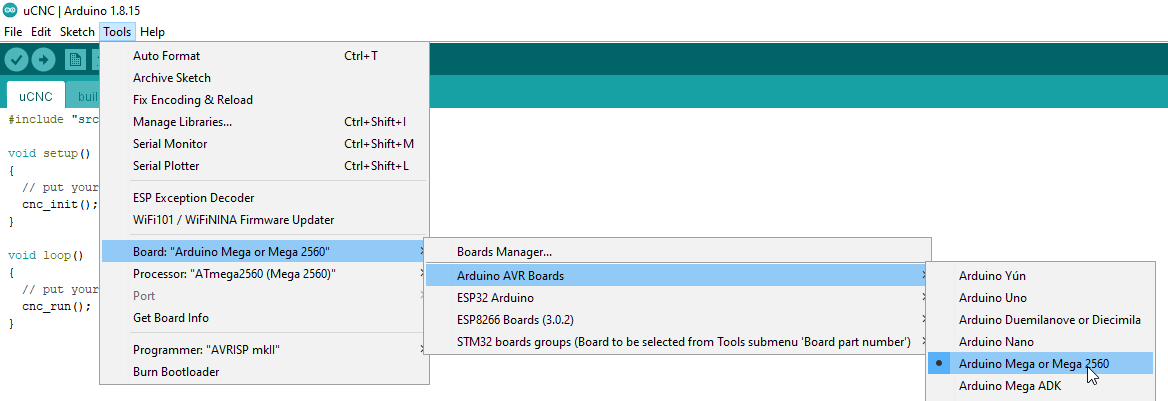
Open uCNC.ino file with Arduino IDE
Start by selecting the Mega2560 board on arduino
You will see 4 files in the sketch. Select cnc_config.h

Scroll a bit down and when you find this
#ifndef BOARD
#define BOARD BOARD_UNO
#endif
change to
#ifndef BOARD
#define BOARD BOARD_RAMPS14
#endif
Then select the cnc_hal_config.h file

Again scroll down and find these lines:
//#define ENABLE_DUAL_DRIVE_AXIS
#ifdef ENABLE_DUAL_DRIVE_AXIS
// defines the first dual drive capable axis
// #define DUAL_DRIVE0_AXIS X
// by default this will be rewired to STEPPER6 (if available on the board)
// this can be uncommented to re-wire to an available (unused stepper other then 6)
// #define DUAL_DRIVE0_STEPPER 6
// #define DUAL_DRIVE0_ENABLE_SELFSQUARING
// defines the first second drive capable axis
//#define DUAL_DRIVE1_AXIS Y
// by default this will be rewired to STEPPER7 (if available on the board)
// this can be uncommented to re-wire to an available (unused stepper other then 7)
// #define DUAL_DRIVE1_STEPPER 7
// #define DUAL_DRIVE1_ENABLE_SELFSQUARING
#endif
change them to
#define ENABLE_DUAL_DRIVE_AXIS
#ifdef ENABLE_DUAL_DRIVE_AXIS
// defines the first dual drive capable axis
#define DUAL_DRIVE0_AXIS X
// by default this will be rewired to STEPPER6 (if available on the board)
// this can be uncommented to re-wire to an available (unused stepper other then 6)
#define DUAL_DRIVE0_STEPPER 3
#define DUAL_DRIVE0_ENABLE_SELFSQUARING
// defines the first second drive capable axis
#define DUAL_DRIVE1_AXIS Y
// by default this will be rewired to STEPPER7 (if available on the board)
// this can be uncommented to re-wire to an available (unused stepper other then 7)
#define DUAL_DRIVE1_STEPPER 4
#define DUAL_DRIVE1_ENABLE_SELFSQUARING
#endif
Then compile and upload it to your RAMPS

If I didn’t mess up the code  you should have a working Grbl compatible firmware working.
you should have a working Grbl compatible firmware working.
Don’t forget you need to review your settings. The software (UGS) you are using should have an interface for that. If you run into any issue please report.


 im having a absolute nightmare with filmware lol ive got the new 1.4 turbo duel LR fimware on 1 board with touchscreen ttf it’s moving however i can get my head around how to zero axis on both touchscreen or the cncjs
im having a absolute nightmare with filmware lol ive got the new 1.4 turbo duel LR fimware on 1 board with touchscreen ttf it’s moving however i can get my head around how to zero axis on both touchscreen or the cncjs