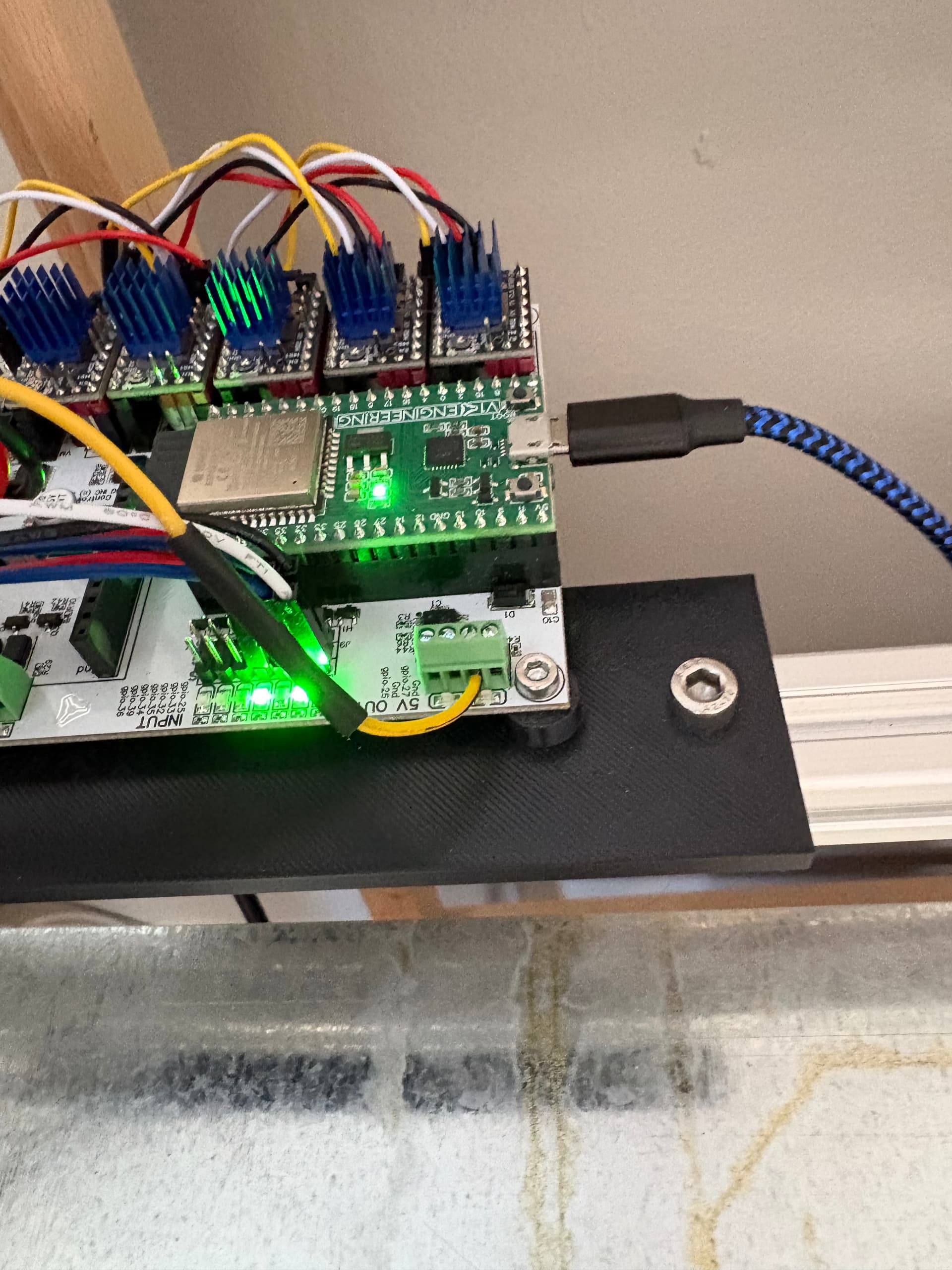
Jackpot board lasertree k30 spindle getting power and ground parallel to the control board, not through the mosfets.
Laser would not turn off before so I switched to using gpio.26 in the config and it worked, now can’t get the laser to turn on at all, no lights at gpio.26 or 27 when it should be sending pwm. Should I be able to see anything?
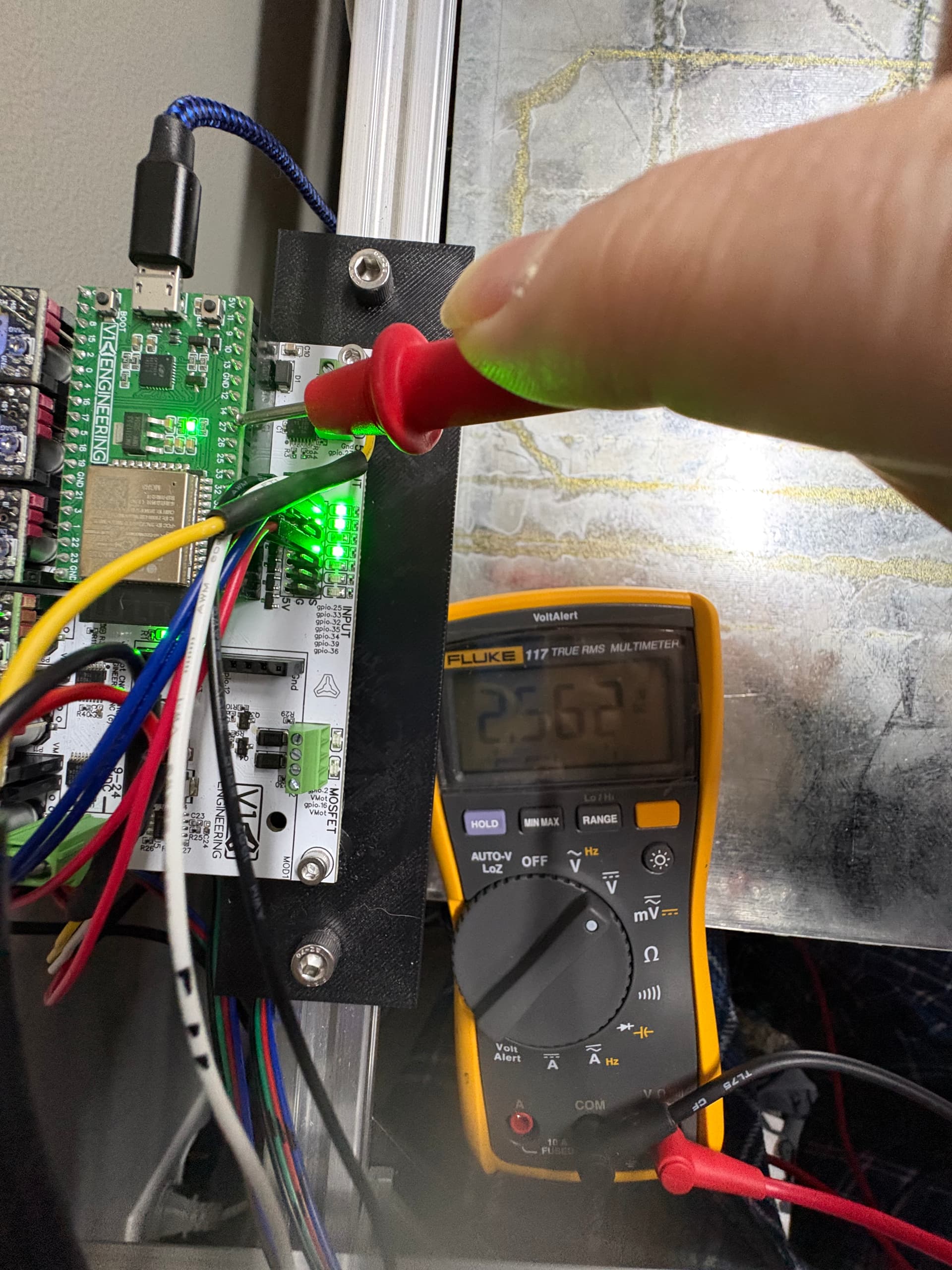
I’ll put a voltmeter on the laser to see if it’s ok too
Laser won’t turn on at all now. Reflowed solder on gpio.27
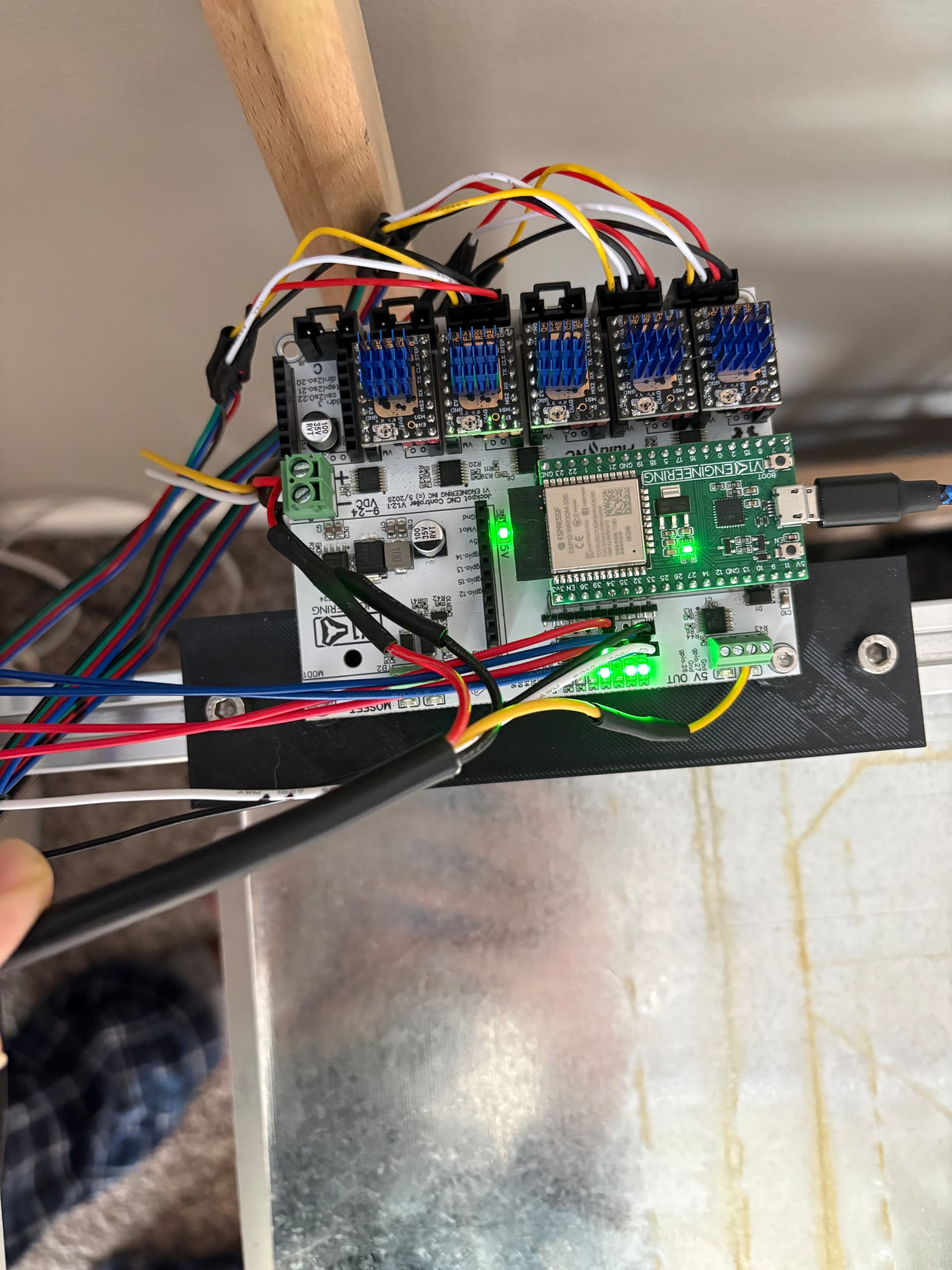
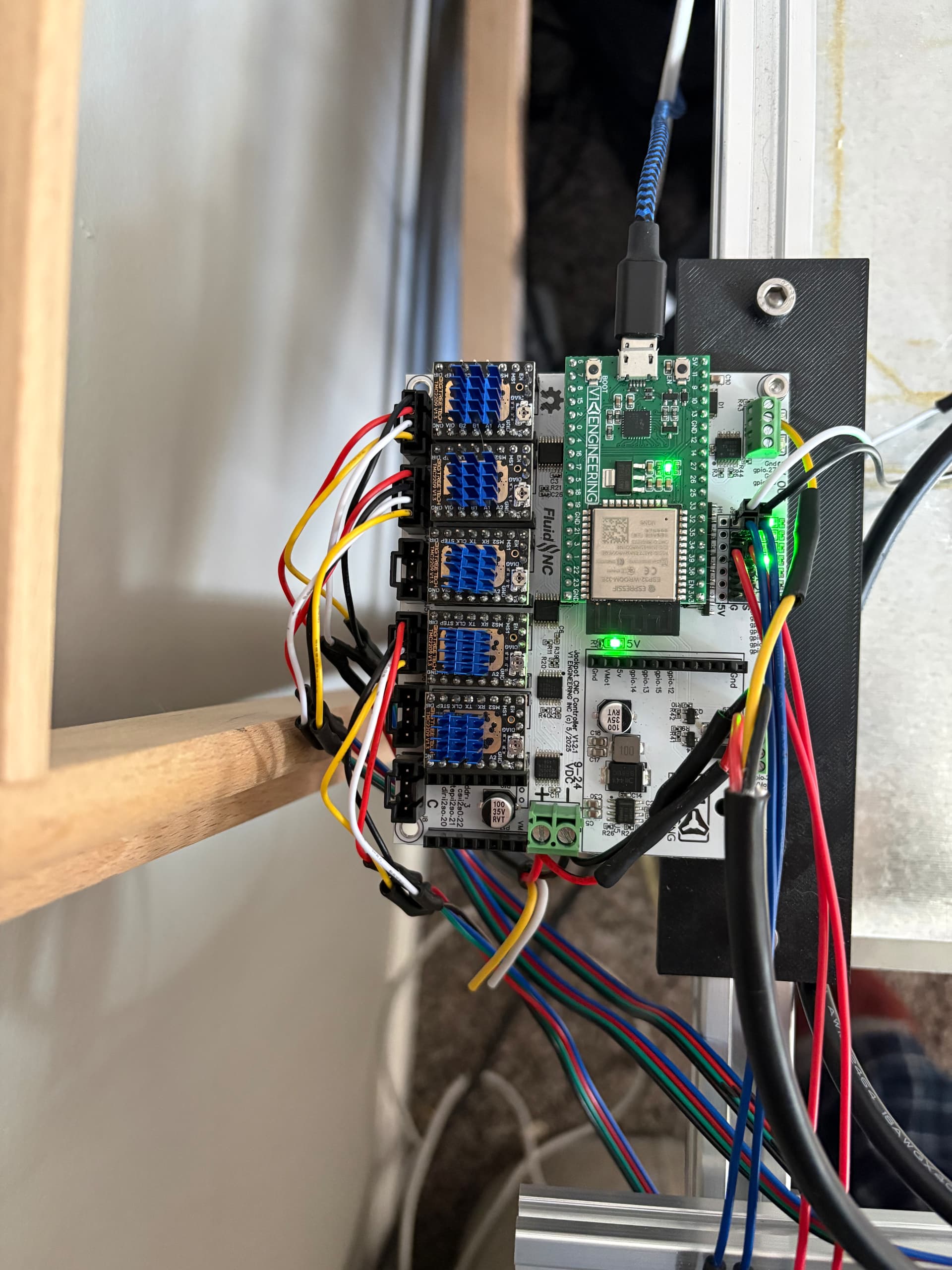
That doesn’t really show how you’ve connected the laser electrically. There’s nothing connected to 26 or 27 in that picure. We want to know where you tied the returns together for the various components.
Side note- you want to keep wiring well clear of the antenna on the ESP-32. What’s shown in the picture will cause wireless signal integrity issues if you use WiFi. If not, carry on.
Oh, the yellow cable goes usually to 27, but it kept the laser on all the time, so I switched it to 26 and changed the yaml, but now it doesn’t function on either one
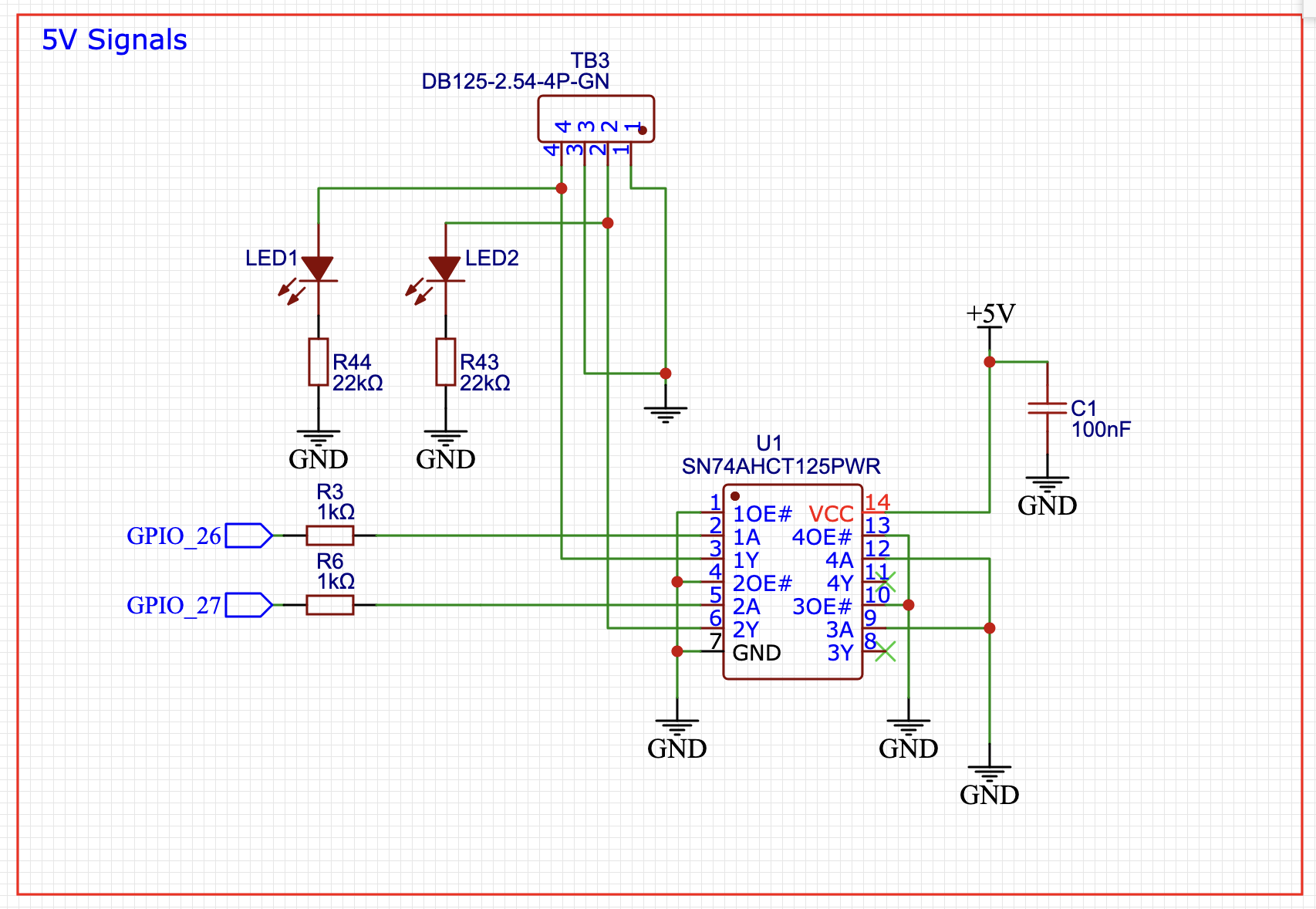
We need either a picture or a schematic of how you’ve hooked this up. Just connecting a single yellow wire will not work correctly in many/most cases.
Edit to add: For a similar reason, we should ask “How are you testing?”
If you’re going to measure GPIO 26 or GPIO 27 on that jackpot, the DMM needs to have the return tied to the (-) lead of VMOT. If there’s no voltage there when there previously was, then you may have blown one or more GPIOs on that ESP-32.
Knowing how that return is hooked up or not will help us try to understand what is wrong with your system.
If that’s obvious to you, no offense intended- we can’t tell what level of experience our community members have from a forum post.
What returns? Lasers have a 3 wire connection. Power, ground, and pwm signal for laser intensity. Not trying to be argumentative I’m just an idiot and don’t know what you’re are referring to. I’ll copy the config in here when I get a chance. I suspect the esp32 as well, I’m getting an espressif to swap and see
I’m testing with a fluke meter, tested power coming into the unit at the board pos and neg ports, getting 24.1v dc. Tested at vmot and same ground, getting 24.1v tested 5v out pins, getting 5v dc.
I’ll take pics of the tests as I do them. With laser power set to 80%, I should be seeing something near 4v on gpio.27 should I not?
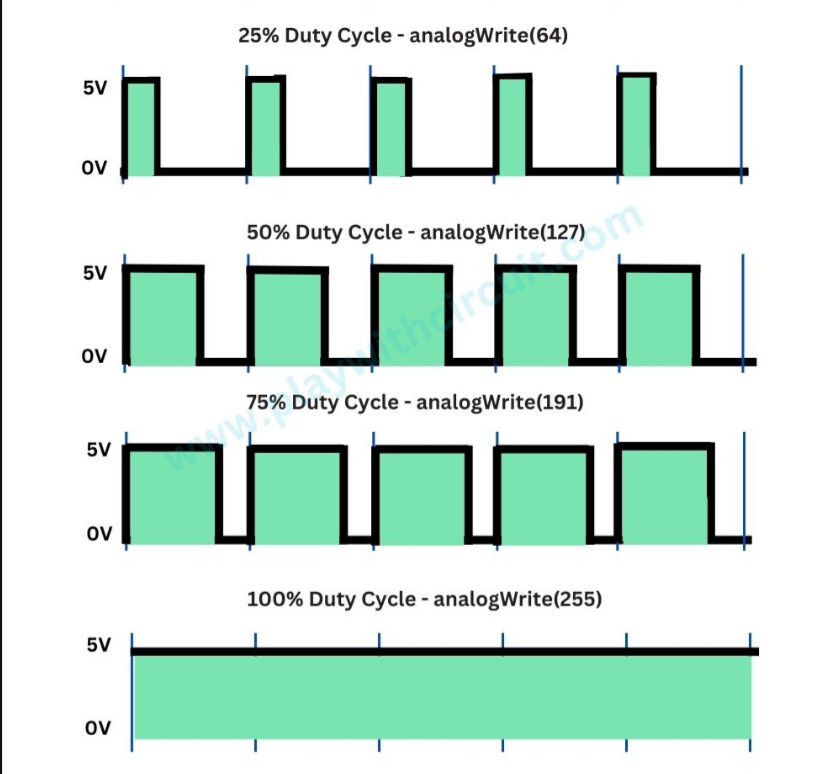
No. The laser is using PWM,not an analogue voltage.
The frequency of the pulses aren’t going to be readable on a voltage meter but the output will only be 5v 80% of the time. You’d need an oscilloscope to view the signal voltage changes
Many laser modules (not all) use 3-wire connections. The terms ground and return can be somewhat interchanged here, but the devil is always in the details.
Is your laser run from the same power supply that powers your Jackpot or do you have different VMOT and Laser power supplies?
If you have two power supplies, the returns (grounds) of the two power supplies have to be directly tied together.
The meter will measure something, but depending on how the meter averages the PWM signal may or may not give you good measurements.
What command are you using to set that laser power?
You’ve set the speed map to be 0 to 1000. To set the power to 80% you should be sending S800.
If you’ve configured your sender or control to expect a map of 0-255, then you’d be sending S204, which in your map would be only 20% output power. (Some lasers may not even light up at that level, though most would).
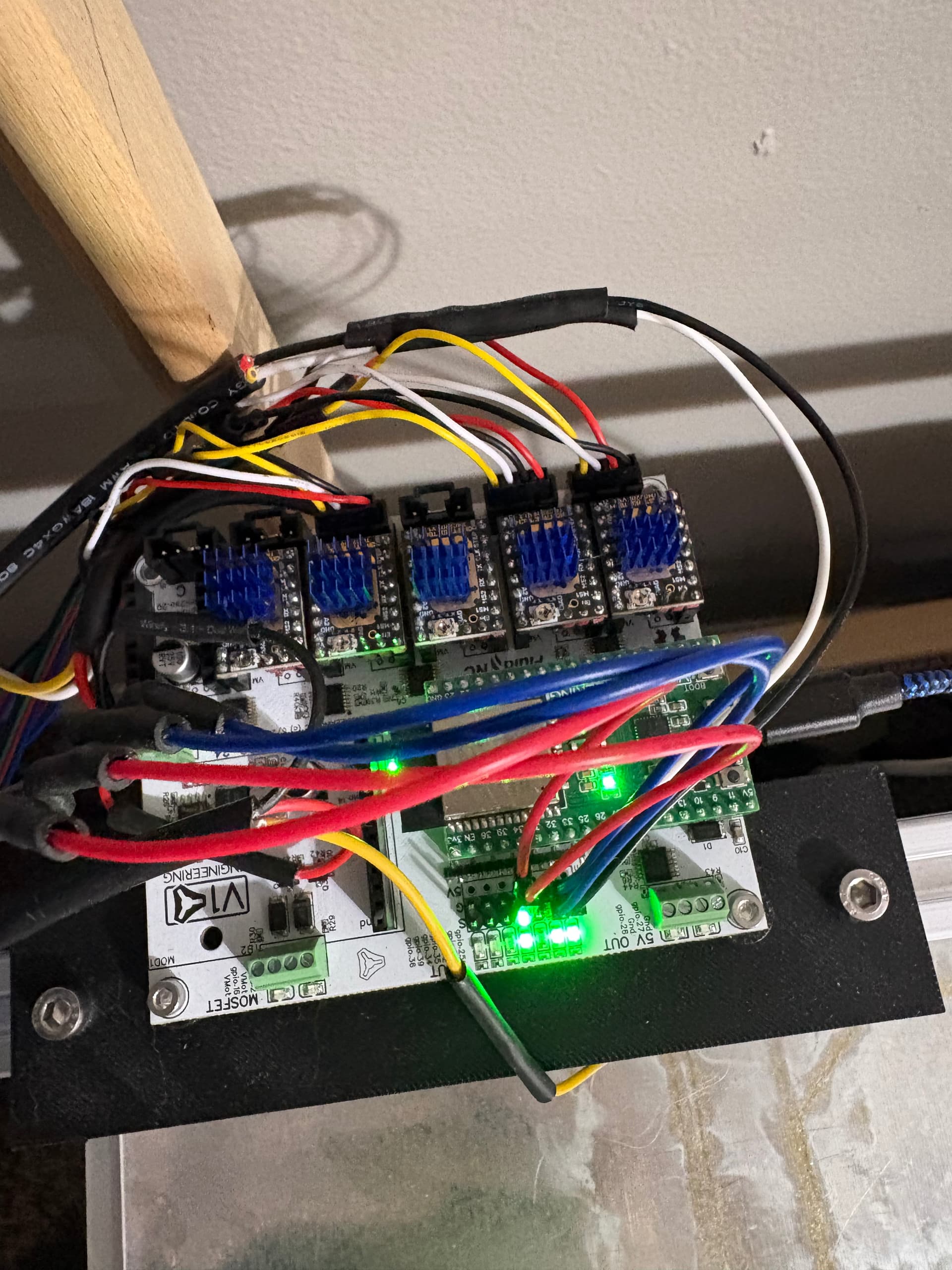
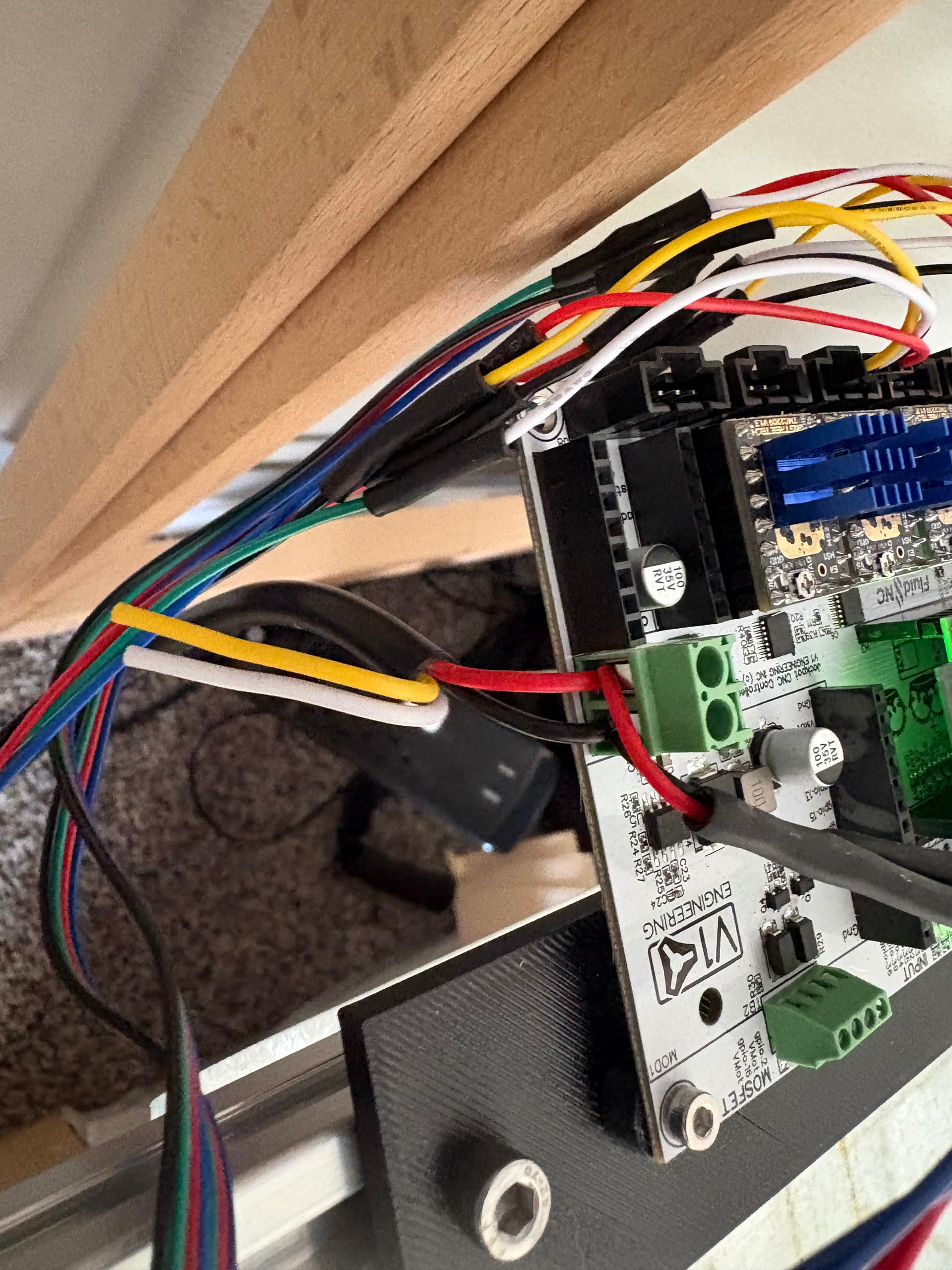
In Lightburn it’s set the same, 0-1000, Lightburn is sending 80% power. Shouldn’t the led at gpio.27 be lighting up when it’s trying to send a signal? It’s staying off when the laser should be emitting. So the laser isn’t emitting. The ground for the laser is going to the power supply ground, connected in parallel at the negative terminal of the board, the positive is connected to the power supply positive at the positive terminal of the board. The yellow signal wire is connected to the 27 pin. You can see it in the pictures.
It was working fine and then it stopped. No changes, nothing else weird, just stopped. I’m going to see what happens if I connect direct 5v to the signal and see if the laser goes from that to at least verify the laser isn’t the issue
That is one reason I’ve asked a bunch of questions about return connections, as breaking the current path would cause it to stop.
Did it do that before? Those outputs are buffered. For a PWM signal I’d expect them to flicker if you’re rastering or light up if vector with the laser.