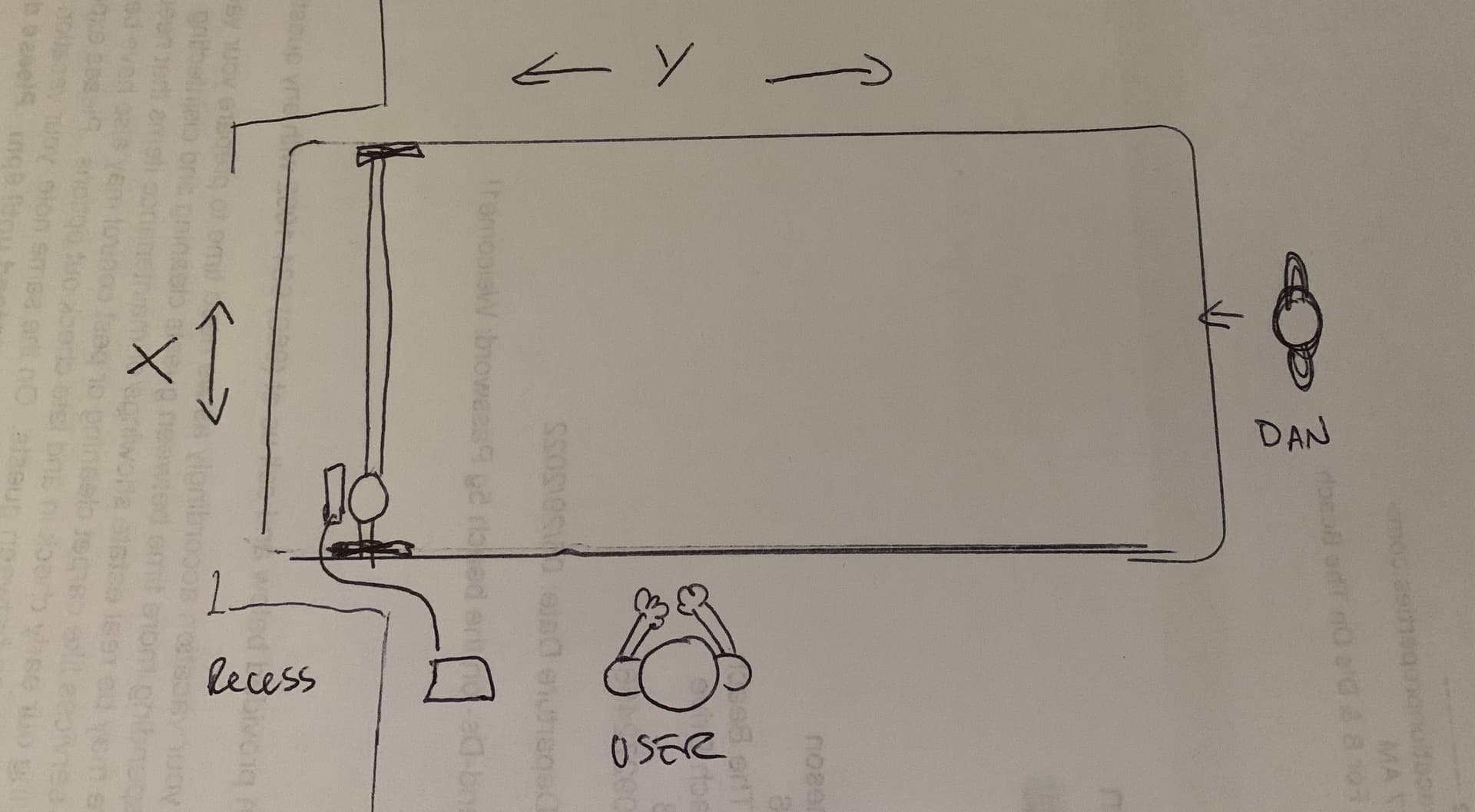
How far away from the controller can the LCD be reliably extended? im looking at a nook in my shop that would put the left end of the system in a recess. id like to extend the wires about 36" so i can put the lcd midline along the Y axis of the table and have it attached using a dovetail so i can remove it easily.
Is that the regular V1 interface for the LCD or a custom? just trying to get an idea of how the skr tft looks in use
I’m using Duet electronics. That’s a PanelDue 7i, so it’s not like the one that the V1 shop sells.
The Marlin Mode cables are pretty restricted in how long they can be. Since the SD card data transmission runs over them, they need to be limited in length. Some people have managed 1m or more, so you might be able to get away with your 36" – but you might not. About 24" is the longest that I think you can rely on the cables.
Depending on what you mean by “left” – are you referring to the far part of the Y axis? You shouldn’t need the LCD at that point, so it could rest on the box the way it’s designed at that point. If you mean the X Min side of the gantry, it might be better to mirror the wheel and rail rider prints and reverse the machine… Or simply turn the machine 180°
im referring to the left side of the long axis, if the gantry travels from left to right. this would be the main parking side and where jobs would start, given that im planning on using endstops.
i took a closer look at the control box and LCD box, and hadnt realized they are separate- i assumed it was one case with both components. It possible that i can get away with 18" additional length and be good- it would depend on how i route things
For reference, the machine is intended to be set up (And the instructions refer to directions) so that the core moves on the X axis along the gantry, and we call that left to right, and the gantry itself moves towards and away from us so front is the side of the gantry where the tool is mounted, and back is the side of the gantry where the control box is mounted. The long axis is the Y axis. This makes the machine match the image that we use when we’re doing the CAM. Estlcam, for example. The X axis is left to right on the screen, and the Y axis is bottom to top of the screen.
i assumed the user was standing facing the machine such that the short X axis was moving away and towards, and the long Y axis was parallel to the users body.
in that case, when looking at the machine from that perspective, the LR3 is located in a recess at teh TOP of the Y axis, with gantry moving left to right with router facing us
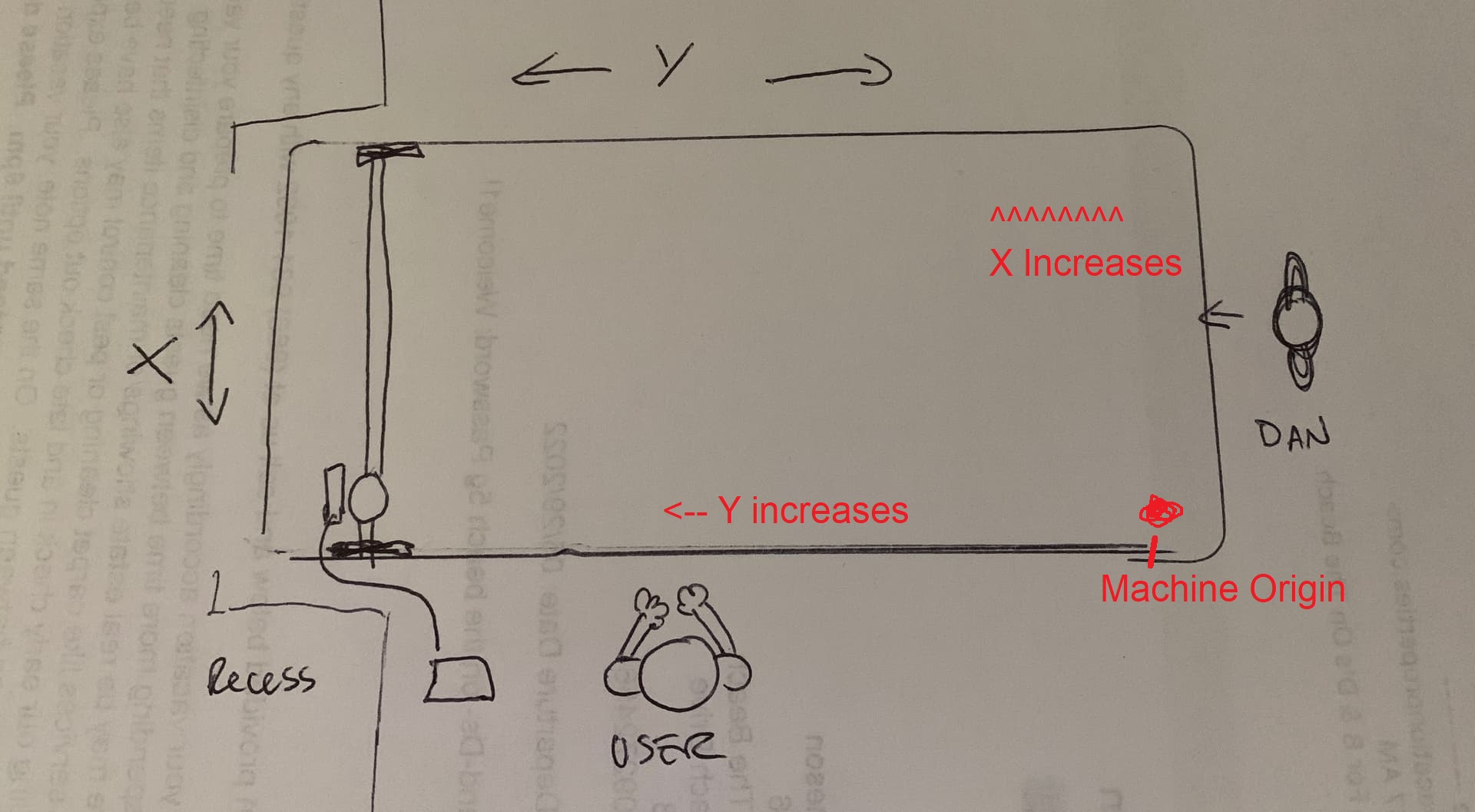
Chances are, “beside” the machine like you described is exactly where I will be standing… That’s where the LCD controls are, after all, but the mental image I have of the machine while I’m plugging away at the software is with me standing so that as the X axis increases, it goes from left towards right, and as the Y axis increases, it goes away from me. (As Z increases, it raises higher off of the table.) If you don’t build the machine this way, you end up with mirror imaged parts. The 3D printers that I use also use the same co-ordinate system.
edit: Your diagram has the recess at the end of the Y axis that is farthest from the origin of the machine, you shouldn’t need to reach the LCD if there’s anything going on at that part, because it should (usually) only be there after you’ve already started the job.
In order for it to start where you are showing it, you would need to swap the X and Y coordinates. You would also need to redesign the Y endstops so that the machine would stop at that end, because the provisions for the endstops are such that they only stop where the tool is closest to the end. In order to swap the axes, you would also need to re-do the firmware, because this would require 2 X drives and 1 Y drive.
It is tempting to just reverse the direction of the Y drive, to get this origin, but this will cause you to end up with mirror imaged parts!
I went back and rewatched Teaching Techs videos, and he has his origin at ‘top left’ which is bottom left from my perspective (he was standing at the end of his table, not the side) where I envisioned mine to be. That’s where I got the idea that that was how it was set up. He does mention if you want a different origin that you need a firmware change.
Darn. That puts most of my intended use case with the machine on the ‘wrong’ side to my shop layout.
I can see where I could move the end stops to, in order to compensate, and it’ll require a few more parts. Firmware change is beyond me though without a night school course. Bio PhD, not a lot of call for coding, lol.
You don’t have to write the code, just configure it . It is a lot easier than a day of phd level biology! The part you have to change is moving dual Y to Dual X, and moving the Z2 endstop from Xmax to Ymax. These are all changes in the configuration_adv.h file. The hardest part is just building the code (which I would suggest you try before changing anything). Use the instructions at platformio. Grab a preconfigured zip of the code at MarlinBuilder releases. Build it, change it, flash it, have a snack, test it. Done.
Honestly, if a bio phd can’t do it, then we need better instructions .
Why do you care which way +X, +Y, and the origin are though? You can just as easily home the machine to the zero in Dan’s diagram, and then immediately jog to whatever corner you want the tool to be. These standards only dictate where the machine homes, and the perspective of the CAM software. In estlcam, you are looking down at the table, with X going right. But you don’t actually have to stand there.
The hardware is all fine. But you need to tell the firmware to drive two drivers for X and one driver for Y. It is currently making two drivers operate for Y and one for X.
So I can home at Dans location (let’s call that bottom right on my pic), then jog it far left to ‘my preferred origin’, then start job.
How accurate are the XY coordinates when jogging in that case? One of the biggest benefits for end stops was the repeatability of placement after tool changes. Will jogging to a set coordinate after homing at Dan 0,0 be accurate enough? I guess so, since that’s how the controller measures it- through stepper steps, right?
I just meant in terms of that picture, not the design.
So I still have to remap coordinates? What does that mean- in the software? How easy is that?
I couldn’t just jog it and take note of what the new XY locations are- something like X0Y800 for example? That would be keeping it on bottom, but move it left by certain amount.
Sorry for cluttering your thread- maybe I should move discussion to my own build thread