I did not know that was a thing sooooo…nope. I did not. I have now and was able to move the X axis, but it was the Y that actually moved.
How do I permanently turn off the alarm? or is that not wise?
So this is what I’ve got so far.
When jogging X the Y moves but…
…when jogging Y, nothing moves.
Jogging Z does not move the servo either.
I’ve tried both the .yaml file from provided by fluidnc and what you (@SupraGuy ) provided above.
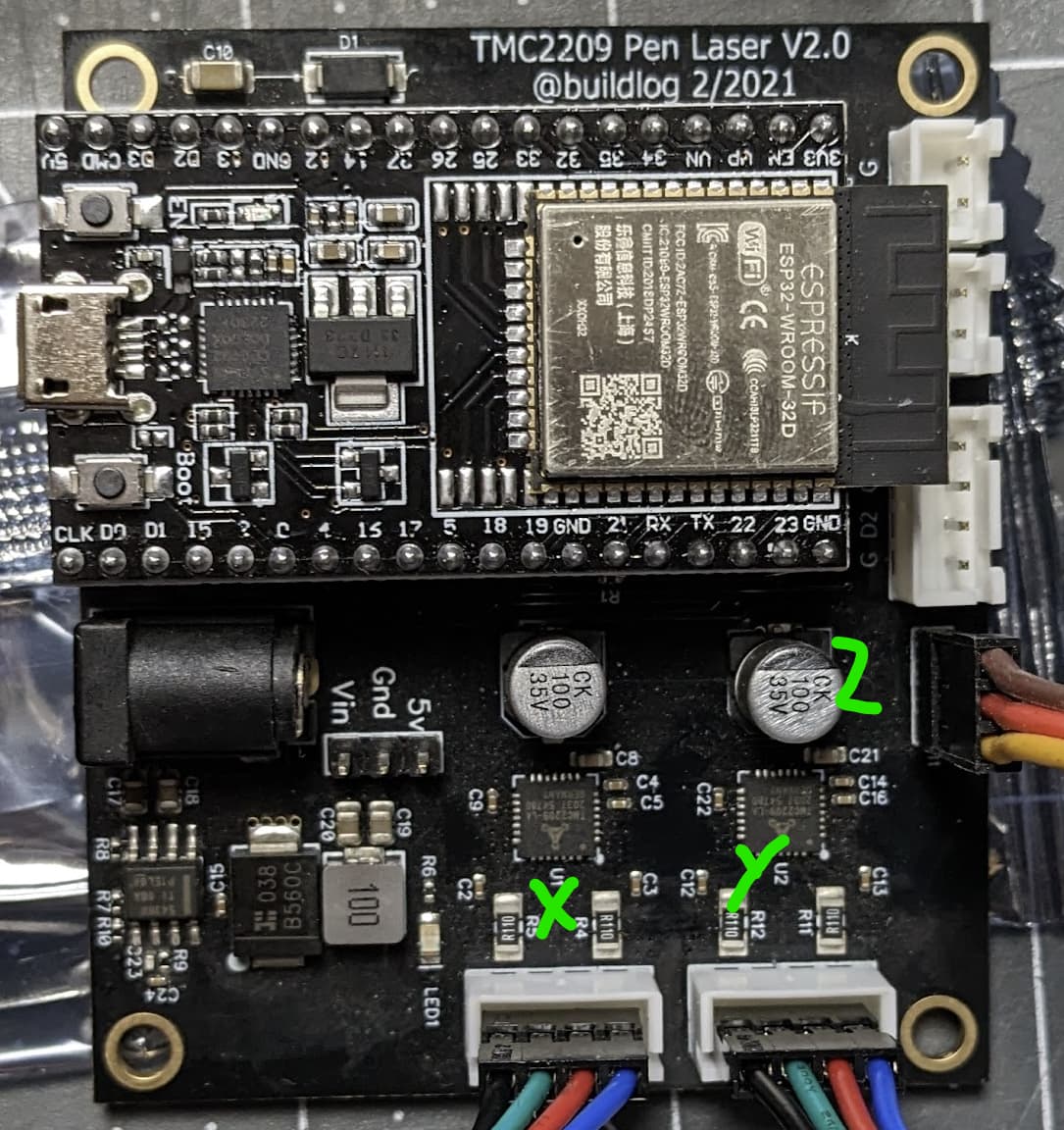
Here is a shot of my board with things plugged in. Yes I did double and tripple checked that y is plugged into y and X into x.
and just to make sure I understand correctly, If i have two .yaml file files for configs, I simply need to change the name here and that will dictate which one fluidnc will use - right?
Hmmm I don’t recall restarting the controller after changing the .yaml file name.
I’ll do that and see if your config file works.
Edit
Update - I changed the config name and restarted the controller to use the config file you provided above butt…
…now when I jog (or use G0 input) one or another axis, BOTH axis move the same distance.
My config is set for CoreXY kinematics, so yeah… that config was set il for my CoreXY laser, and I’ll be using it on the same chassis vinyl cutter. Another one will go on a ZenXY, all use CoreXY kinematics… sorry, should have warned you about that.
X jogging moves both motors the same way, Y jogging moves them in opposite directions. That’s how CoreXY works.
Z servo “sorta” works.
There is movement on Z however, it is not acting how I anticipate it would. Which maybe is the issue - my expectations of what it should do is not what is supposed to do.
Right now, I get very little movement. Just now, I would get small movements when I would jog X and Y. But no real movement when I jog z.
I see there is a max travel of 5mm. (max_travel_mm: 5.000)
If I understand right, this would mean that a Z movement in my cam software would only be effective up to 5mm relative to Zero (-5 to +5).
So I would expect that If I give a z movement of 5 it would rotate the full range. Give is a movement of -5 and it would return.
I’m assuming this is not correct.
So exactly how is the servo supposed to respond to Z input?
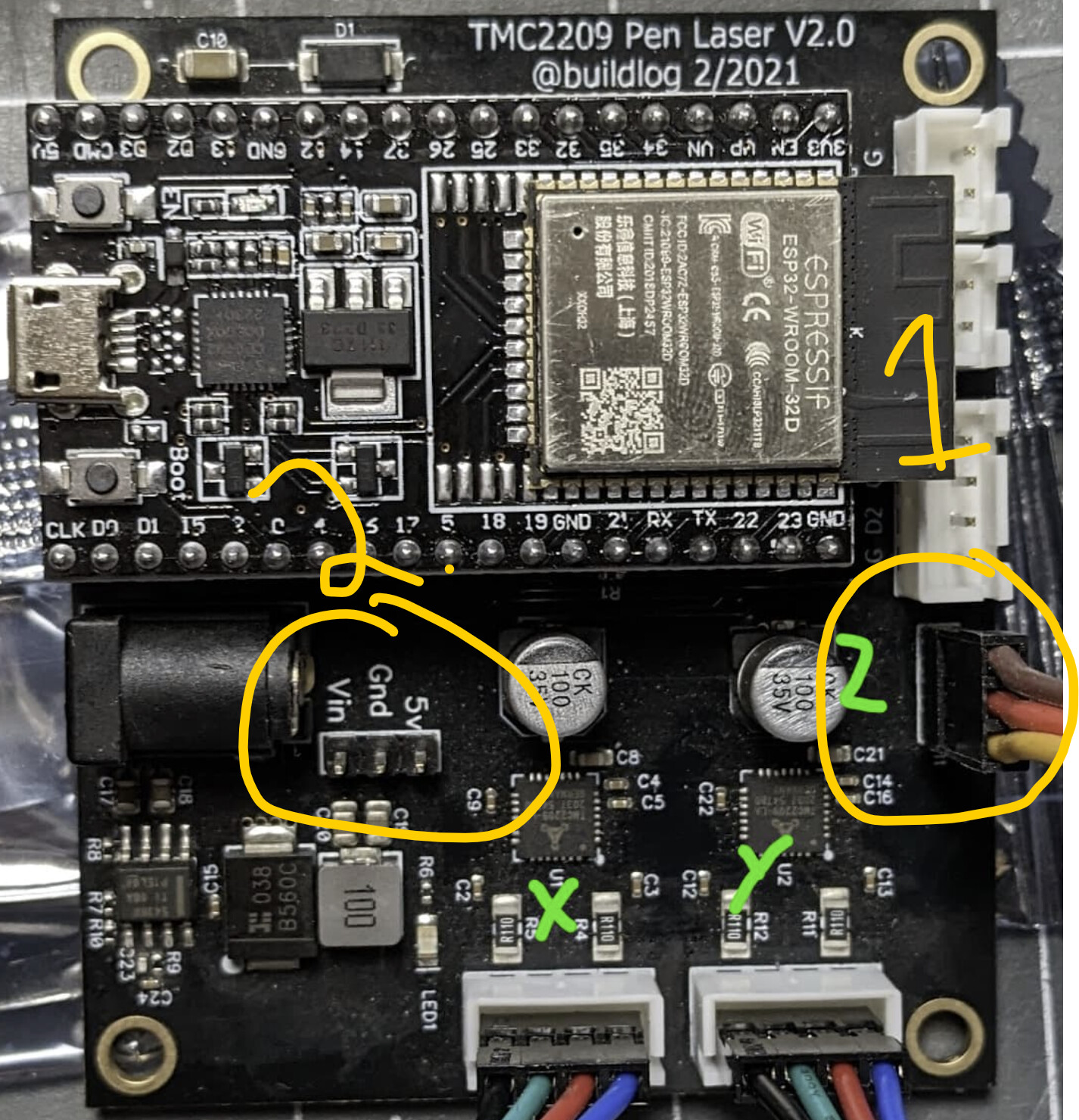
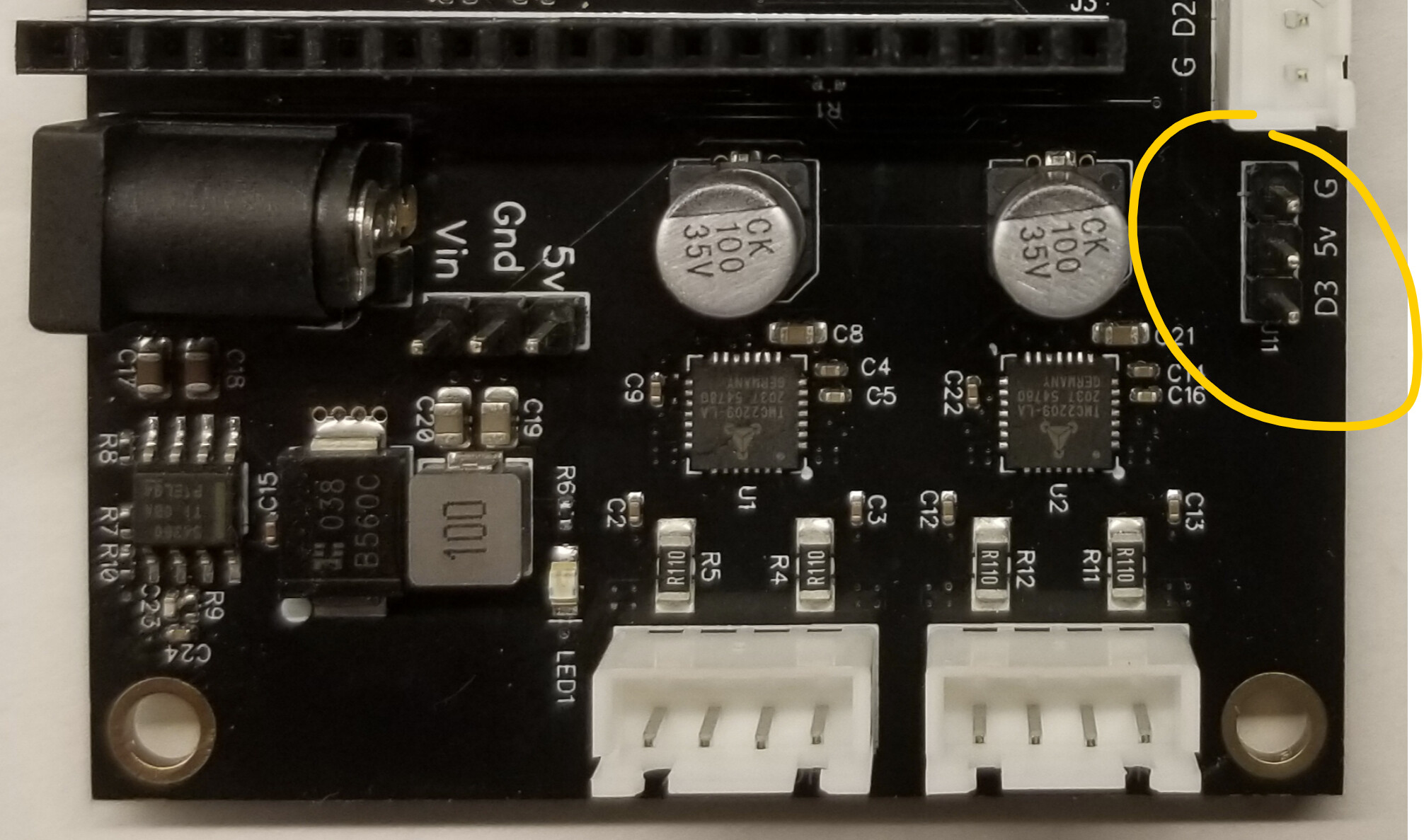
is my servo plugged in the correct place (#1)
or is supposed to go in location 2?
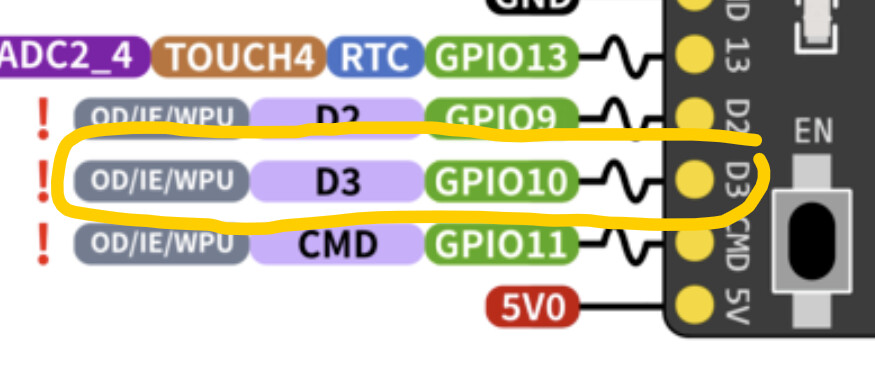
I’ll need to do some testing. The schematic I found on Github seemed to indicate gpio.16, I didn’t find the one you have there. The one I found works for the X and Y motors, and works to fire the laser. Maybe I misread something, and 16 is connected but not direct like that. That could explain why it sort of works.
So this morning I went to do a test plot and the Z did not work.
Odd since yesterday it was working just fine on GPIO 10
I did find on github firmware where you reference it being on pin 16
I don’t know…maybe yesterday, when it was working, I didn’t re-boot the board properly after I updated my config file from 16 to 10 and technically it was still using 16?