After reading and watching YouTube vids and wanting to try out ugs ive decided to scrap the skr pro for a fluidnc board my first choice would be the jackpot but at £100 ish with shipping and customs a bit out of my budget so looking at the tinybee at quarter of the price. unless anybody can reccomend another route?
Which stepper motors are my best choice? I already have a new set of 2209’s.
Duel endstop config is this possible.
Any adaptor boards recommended?
Any sample config files to get me going in the right direction?
Thank you for taking the time to read my post.
I have a tinybee in my LR3 with some tmc2209 and it’s working great
Dual endstops, laser, and it still has a few gpio to spare…
Some pins labelling can be a bit confusing but all in all it’s a great value for the price
The big downside though is that you can’t adjust the driver’s current through software
1 Like
Would you mind sharing your config file and pin layout?
That would save me a big headache:)
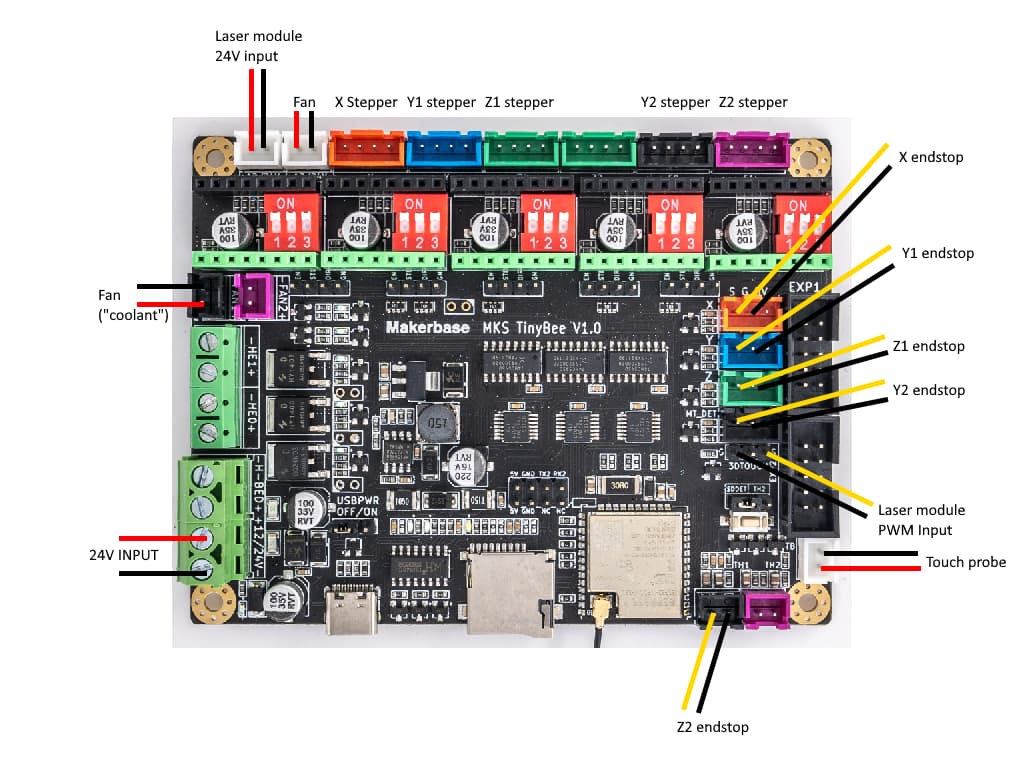
MKS TinyBee wiring:
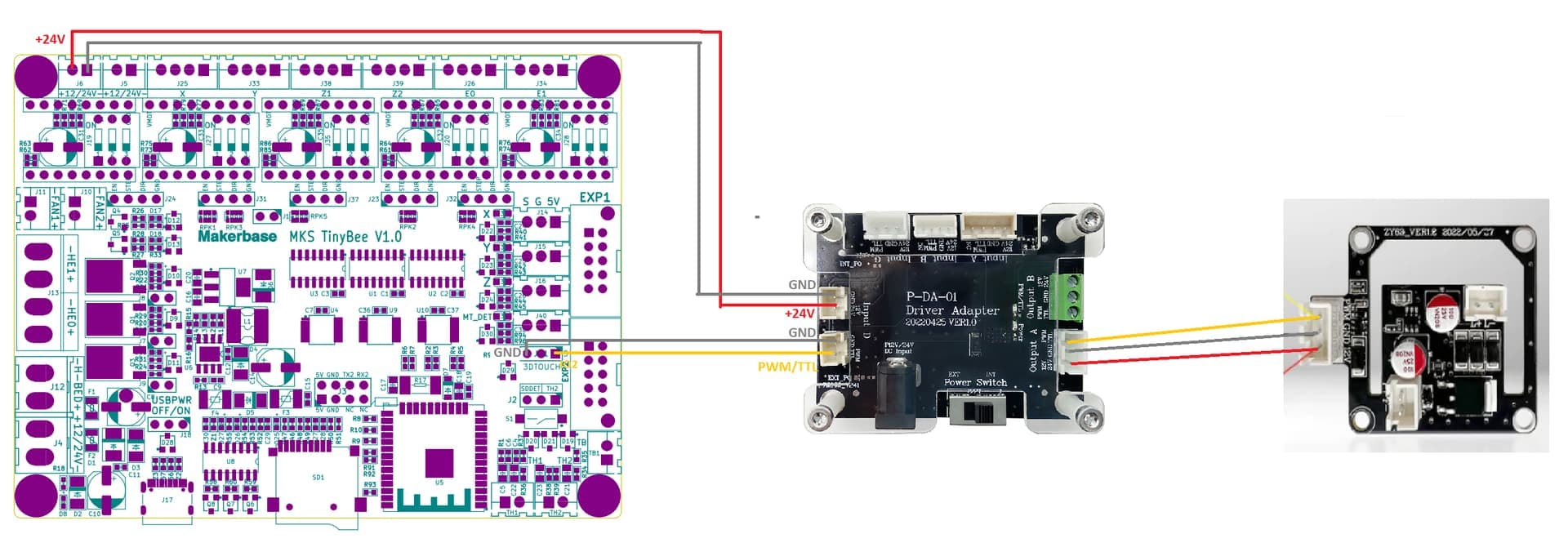
Laser board wiring:
board: MKS TinyBee V1.0 XXYYZ
name: LowRider 3
meta:
stepping:
engine: I2S_static
idle_ms: 255
pulse_us: 4
dir_delay_us: 1
disable_delay_us: 2
segments: 12
i2so:
bck_pin: gpio.25
data_pin: gpio.27
ws_pin: gpio.26
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: gpio.34:low
frequency_hz: 8000000
kinematics:
Cartesian:
axes:
shared_stepper_disable_pin: NO_PIN
shared_stepper_reset_pin: NO_PIN
x:
steps_per_mm: 100.000000
max_rate_mm_per_min: 8000.000000
acceleration_mm_per_sec2: 80.000000
max_travel_mm: 850.000000
soft_limits: false
homing:
cycle: 2
allow_single_axis: true
positive_direction: false
mpos_mm: 0.000000
feed_mm_per_min: 300.000000
seek_mm_per_min: 1000.000000
settle_ms: 500
seek_scaler: 1.100000
feed_scaler: 1.100000
motor0:
limit_neg_pin: gpio.33:pu
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 5.000000
stepstick:
step_pin: I2SO.1
direction_pin: I2SO.2
disable_pin: I2SO.0
ms1_pin: NO_PIN
ms2_pin: NO_PIN
ms3_pin: NO_PIN
reset_pin: NO_PIN
y:
steps_per_mm: 100.000000
max_rate_mm_per_min: 8000.000000
acceleration_mm_per_sec2: 70.000000
max_travel_mm: 1800.000000
soft_limits: false
homing:
cycle: 2
allow_single_axis: true
positive_direction: true
mpos_mm: 0.000000
feed_mm_per_min: 300.000000
seek_mm_per_min: 1500.000000
settle_ms: 500
seek_scaler: 1.100000
feed_scaler: 1.100000
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.35
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 10.000000
stepstick:
step_pin: I2SO.4
direction_pin: I2SO.5
disable_pin: I2SO.3
ms1_pin: NO_PIN
ms2_pin: NO_PIN
ms3_pin: NO_PIN
reset_pin: NO_PIN
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:pu
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 10.000000
stepstick:
step_pin: I2SO.10
direction_pin: I2SO.11
disable_pin: I2SO.9
ms1_pin: NO_PIN
ms2_pin: NO_PIN
ms3_pin: NO_PIN
reset_pin: NO_PIN
z:
steps_per_mm: 3200.000000
max_rate_mm_per_min: 500.000000
acceleration_mm_per_sec2: 60.000000
max_travel_mm: 75.000000
soft_limits: false
homing:
cycle: 2
allow_single_axis: true
positive_direction: true
mpos_mm: 70.000000
feed_mm_per_min: 50.000000
seek_mm_per_min: 200.000000
settle_ms: 500
seek_scaler: 1.100000
feed_scaler: 1.100000
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.22:pu
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 5.000000
stepstick:
step_pin: I2SO.7
direction_pin: I2SO.8:low
disable_pin: I2SO.6
ms1_pin: NO_PIN
ms2_pin: NO_PIN
ms3_pin: NO_PIN
reset_pin: NO_PIN
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.36
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 2.400000
stepstick:
step_pin: I2SO.13
direction_pin: I2SO.14:low
disable_pin: I2SO.12
ms1_pin: NO_PIN
ms2_pin: NO_PIN
ms3_pin: NO_PIN
reset_pin: NO_PIN
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
fault_pin: NO_PIN
estop_pin: NO_PIN
coolant:
flood_pin: I2SO.19
mist_pin: I2SO.20
delay_ms: 0
probe:
pin: gpio.39:low
toolsetter_pin: NO_PIN
check_mode_start: true
macros:
startup_line0: M7
startup_line1: M8
macro0: $MD
macro1:
macro2:
macro3:
after_homing:
after_reset:
after_unlock:
start:
must_home: false
deactivate_parking: false
check_limits: false
parking:
enable: false
axis: Z
target_mpos_mm: -5.000000
rate_mm_per_min: 800.000000
pullout_distance_mm: 5.000000
pullout_rate_mm_per_min: 250.000000
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: NO_PIN
digital1_pin: NO_PIN
digital2_pin: NO_PIN
digital3_pin: NO_PIN
digital4_pin: NO_PIN
digital5_pin: NO_PIN
digital6_pin: NO_PIN
digital7_pin: NO_PIN
NoSpindle:
Laser:
pwm_hz: 5000
output_pin: gpio.2:pd
enable_pin: NO_PIN
disable_with_s0: false
s0_with_disable: true
tool_num: 1
speed_map: 0=0.00% 1000=100.00%
off_on_alarm: true
arc_tolerance_mm: 0.002000
junction_deviation_mm: 0.010000
verbose_errors: false
report_inches: false
enable_parking_override_control: false
use_line_numbers: false
planner_blocks: 16
Note: I’m using 1mm pitch Z screws, so you may want to adjust the steps per mm there
One thing I’d like to change is the wiring of the fans I used for the case, There’s no point in controling them, so you might just wire them in parrallel with the 24V input
I bought a 0-10V converter baord to control the spindle VFD but I didn’t get around wiring it yet, I’ll update this if I ever end up plugging it
1 Like
Thank you its much appreciated
Hi Simon I moved to the Jackpot from the SKR Pro - I just had so many problems with the SKR boards over the years. The Jackpot has been a huge improvement. I also ran the MKS Tinybee as recommended by @Fabien but I do like to be able to turn up the current in the config as they run pretty cold here in Scotland.
I have never paid any duty on orders from Ryan, maybe just lucky? Its good to get the touch plate, and definitely that collet for the Makita - there is nothing equivalent here in the UK at anything like Ryan’s price. His router bits seem superior too. All in all, the duty is a concern and the shipping is a cost but I think its worth it, if you stock up on a few bits. You can feel good about ordering from Ryan too.
There is also a route to getting your own Jackpot made and shipped - there is a thread about that somewhere.
Good luck
Rob
p.s. I grew up in Sheffield and spent most of my childhood summers in Skegness and Ingoldmells, back in the 80’s, my Gran had a van there. Some of my happiest memories.
Just to chime in on tinybee vs jackpot and duty…
I initiallly bought and installed the tinybee
Then I won a jackpot as a prize from a contest Ryan organized
When I received the package I had to pay taxes on shipping even though it was a free gift >_< (20-25€ mind you…)
I never got around switching to the jackpot and still run the tinybee because there’s been no limitation with it that could justify the hassle and downtime ![]()
The jackpot looks a lot nicer and tidier, and adjusting voltage on the board would be great, but that’s mostly “quality of life” improvement
If you buy other stuff from v1 and cumulate shipping though, it’s great value too
1 Like
me again haha do you still clip or bend the pin on the 2209’s ?
I think it depends on the particular drivers you get
I didn’t clip or bend any pin on mine
1 Like
above you state you were going to buy the jackpot, did you buy Ryans board or the tinybee, or something else. That will help others to help you.
I ordered my Tinybee on Aliexpress as a kit and it came with the drivers and the screen (which wasn’t used). The pins that you would bend don’t go into anything on the tinybee. You have to set that pot though and its a bit fiddly. Mine is out of the machine at the moment so here’s a pic.
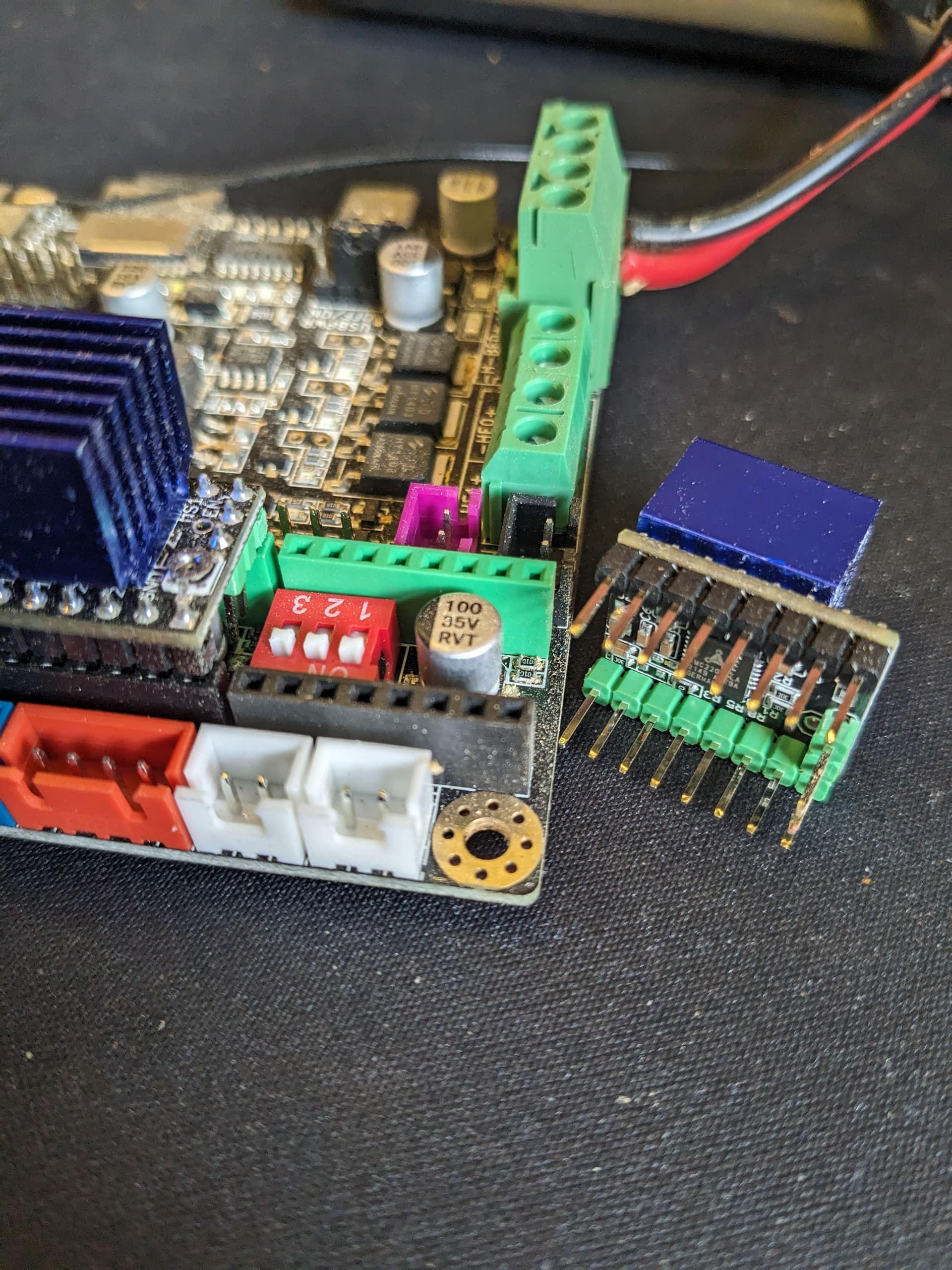
1 Like
yeah the pots are terrible… btw the way, you need to shut the power off before you try and adjust them unless you like your board well done… ask me how I know >_<
1 Like
What do the pots need setting too?
There’s a small pot/resistor on top of the drivers that sets the VREF current
sorry yes i meant what should they be set too ?
See chapter “How to calculate VREF” for a complete answer ![]()
Short answer: 0.80V-0.85V is a standard value
1 Like
Hey mate would this config also apply to my drv8825 drivers as my 2209s are faulty:(
I have 2 drv8825 installed for the Z axises on my board, the other ones are TMC2209
No problem at all for me
Perfect ![]() I’ll try this config. Tomorrow, only question I have is I noticed the limit pin and limit all pins has no-pin ??
I’ll try this config. Tomorrow, only question I have is I noticed the limit pin and limit all pins has no-pin ??
And can you tell me your steps ? Are all 3 on ? For max microsteps ? On the drv8825s