I have been building my 3d printer for about a year. Im a programmer and so alot of the hardware side of things I have really enjoyed learning to get to the point im at. I read and read to try and fathom this massive undergoing.
My x y z motors are all from purchsed here and work perfectly thank you.
For the life of me I cant get my mk8 extruder motor to turn a full rotation it seems to skip around back and forth. I even took the whole thing apart and tested the motor alone.
Its some geetech motor.
I have read that this could be voltage issue. So I tested the values of your firmware which is 138 which is 70% and also tested 90%
I have switch driver with z axis motor it rotates perfectly. But the geetec wiggles back and forth while in the z axis driver.
I bought a new cheapie motor off amazon and it behaves exactly the same.
Have I missed some configuration in the firmware?
I have broken out the multimeter amd have tested both the ohms and the continuity of both motors they seem fine. I have tested continuity on the wiring to both ends.
I’m sure its something simple I just can’t work it out. Im using a raspberry pi with the image v1pi from here using octo print to extrude. No hot end plugged in but temperature sensor connected. M302 s0 used to get around thermal protection while extruder is un plugged.
Power box is bought from here 12v . Chineese knock off rambo from amazon (sorry I’m poor) .
Sorry about the brain dump posting from a mobile and I’m not that great at writing.
Any pointers or help people can offer would be very much appreciated.
I’m not sure I completely follow. But I will take a guess anyway.
Do you have a clone mini rambo? Some of those have the motor connections wired up ABAB instead of AABB. I have no idea why, probably some tevo printer uses that ordering or something. That could explain it.
You don’t need v1pi if you are just using octoprint. Although it is cool that you are. But I don’t uodate it as often as the octopi image. The only benefit I can offer is auto hot spot.
Sorry about the wall of text. Its a rambo 1.4a board.
So the extruder motor ticks back and forth when I click extrude. I took the whole extruder apart to rule out to much pressure on the drive. Still the same behaviour. I bought a new motor to replace still the same behaviour. I switch the z motor into e0 and that rotated fine. But the e0 motor in the z axis twitch back and forth again. I tested the motors pairs by multimeter continuity test that is wired correctly. I tested the extension cables I have made too, and they seem fine.
I’m using the pi connected to the rambo to use the Web interface so the pi can be on WiFi as its far from ethsrnet access.
I think I proved the driver is fine by putting the z axis motor in the e0 driver amd that ran fine. Everything is pointing towards dodgy motor but to buy two dodgy motors in a row sounds quite improbable. But stranger things have happend.
I’m mostly curious if the extruder config needs to change with diffrent brands of motor. Also what digipot settings I should be using. Im happy to share any config files that might help work it out. Or pictures.
I really do appreciate all your suggestions and please do correct my nieve guesses if you think my logic is flawed. Its all port of the learning process. This has been on of my favourite projects ever so far.
Can you rotate the motor by hand and how does it feel?
If you close each of the coils there should be a resistance when turning the motor by manually. That way you can check what wires belong to the same coil.
If the Z motor works on E0 the driver and settings are correct so either the extruder motor is bad or the cabling still wrong and the new motor has the same issue unfortunately.
Thats kinda what I was expecting. Dont be sorry its no ones fault. Its all part of the fun. Okay so I can confirm I have not closed the pairs lines to see if its solid. I will try when I get home.
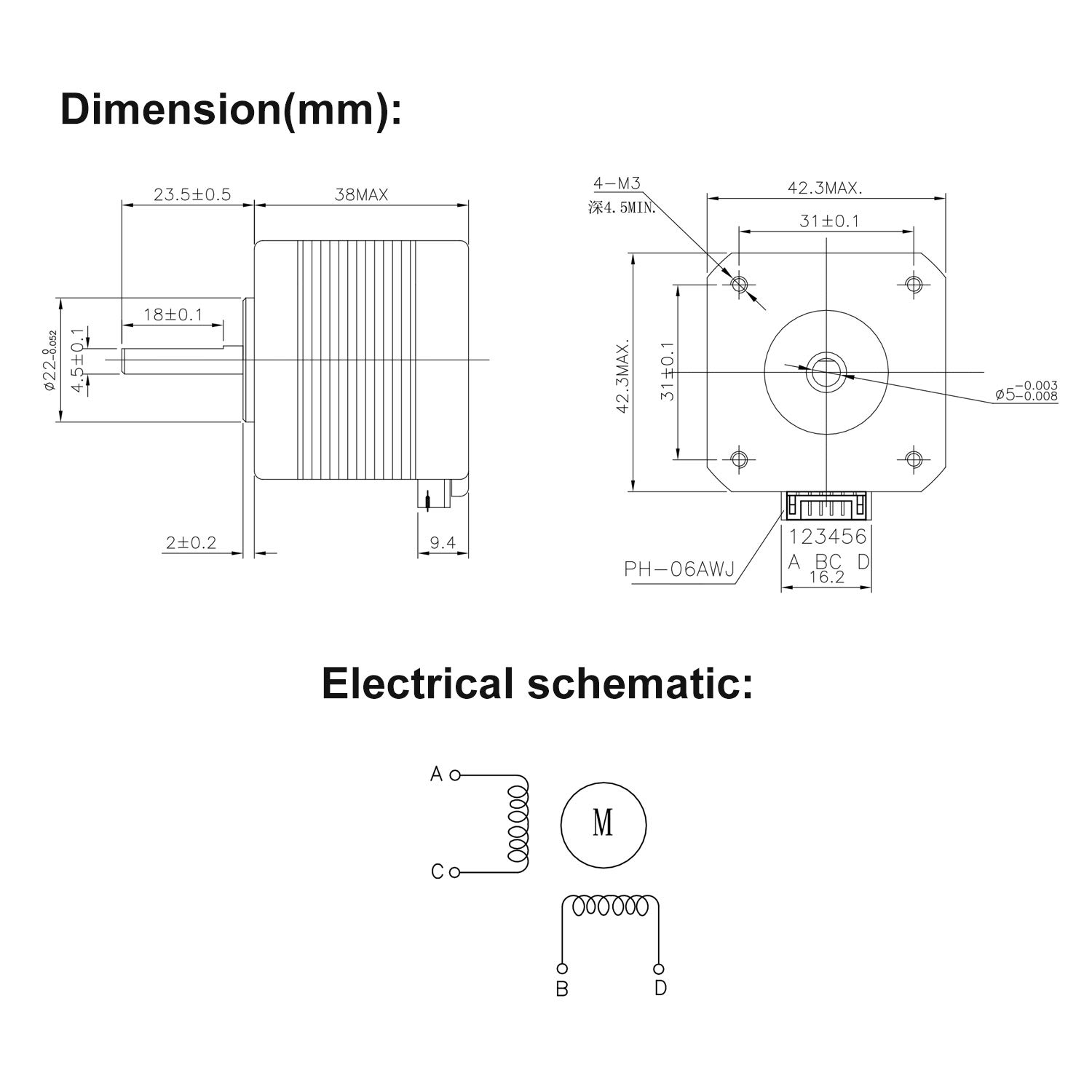
When I tested the pairs with multi meter on the back of the motor there is a socket. In the socket there are 6 pins a b c d e f.
The way the pairs seem to be are a1 d1 are a pair test with multi meter ohms reads 25 and have continuity. Same with f2 and c2.
Sorry I dont know the correct way to say this. I then checked the cable and they route correctly.
While I’m typing this i think I may have worked put whats wrong.
If say for example a1 d1 where back words would this cause it. So for example I have d1 a1 rather then a1 and d1.
So both pairs could be fighting each other? Do they have a positive and negative and how would I test this?
Okay I must have miss understood and thought that was for mini rambo only.
Thank you though for pointing it out cos I totaly missed what he ment. So assuming the pins are fine on the board. As I have tested them with the other motors. Im guessing its my extension.
For each pair in the motor is there a positive and negative?
How do I make sure I have the same positive and negative for each pair. Sorry I’m probaly showing some nievity about how motors work here.
When I was playing with the motor and it was juddering back and forth. I could give it a tiny push in either direction and get a full step rotation. So that kinda says that when each phase is live they are pushing opisite directions.
You guys have been so much help and I thank you emensley.
It do think the driver isn’t connected correctly to the coils (motors are really dumb, and they rarely, if every, are faulty).
I suggested that the board’s port may be wired wrong. The other suggestion here is that either the wiring harness, or the motor is wired wrong.
If you disconnect the motor at the rambo (don’t disconnect them while powered), those pins should be AABB. So you can check with your meter, or the shorting trick to confirm that the first two pins are on one coil and the next two pins are on the other coil. Just generally look for loose connections too. Tug a little on the wires and make sure they don’t come loose, and if you can tell from your meter if a connection is opening up when you tug on them, then rewire it.
From the posts here, this is 90% of the time bad wiring. 9.9% of the time it is a cloned rambo or mini rambo where the port is wired wrong, and 0.1% of the time a bad motor.
@Darkj721 - I think your troubleshooting logic is correct with testing the drivers by moving the motor connections around. I think the issue is with the motor windings order.
Just for the sake of clarity, AA is one motor winding “pair” and BB is the other motor winding pair. They’re not positive/negative, per se, the driver energizes the pairs with a series of pulses to get the desired steps or microsteps. In addition to the multimeter, a low-tech way to identify a pair is to (while disconnected from the driver circuit) short any 2 wires of the motor together and try turning the shaft - when the shaft gets harder to turn you’ve got a winding pair. The other 2 wires should be the other pair.
From your description of testing the motor socket it sounds like the motor socket is A x B A x B (where x = no connection).
I think if you put together a wiring harness (or adjust the pins on the one you’ve got) to remap motor pins to driver pins as AA BB pairs you’ll get good behavior out of that motor.
Thank you guys I have some things to try. In the mean time I found this diagram relating to the wiring of the motor. I’m gonna link the motor I bought here to see if any of you professionals can spot why it might not be working. It might not be suitable at all I just bought the cheapest I could see at the time to rule out the broken motor.
The schematic on the motor diagram confirms that the connections for the windings are interspersed as I supposed.
Looking back at your original photo, Black and Green should be one winding, and Red and Blue the other. If you can put the wires into order as Black-Green-Red-Blue on the connector to the stepper driver you should be in business. If the motor runs backwards from the desired direction, just flip the plug around and it should then run the right way.
Zipped up my config here as I’m now leaning towards it being incorrectly configured. I’m starting to kick my self that I haven’t been using version control from the beginning as I did change some values.


 but that does sound like either way over power on the driver or miss wired like the mini
but that does sound like either way over power on the driver or miss wired like the mini