So, last fall I built a Primo just to use as an XYZ platform that I was manually controlling with keyboard commands. Finally mounting a router to it and having some issues:
TMC Connection Error Displays on Screen BUT all motors are moving correctly
Distances are 2X expected so if I ask for 10mm I get 20mm
SKR 1.3 using a mostly stock Marlin_V1CNC_Skr1p3_Dual_2209_2.1.1_515 firmware (Same issues with stock)
TMC2209 drivers
24v power supply
I suspect the 2x movement is from the 24power supply and I assume I can just change it via
DEFAULT_AXIS_STEPS_PER_UNIT but not sure if that’s the right way to handle it.
Changing the stepper motor source voltage won’t change the move distances.
If the TMC drivers are not being correctly configured they may move incorrectly even if you have the right settings in firmware.
I haven’t seen that error, but I bet someone else in the forums has some ideas.
Generally, checking that all the jumpers are set correctly per the docs is a good starting point.
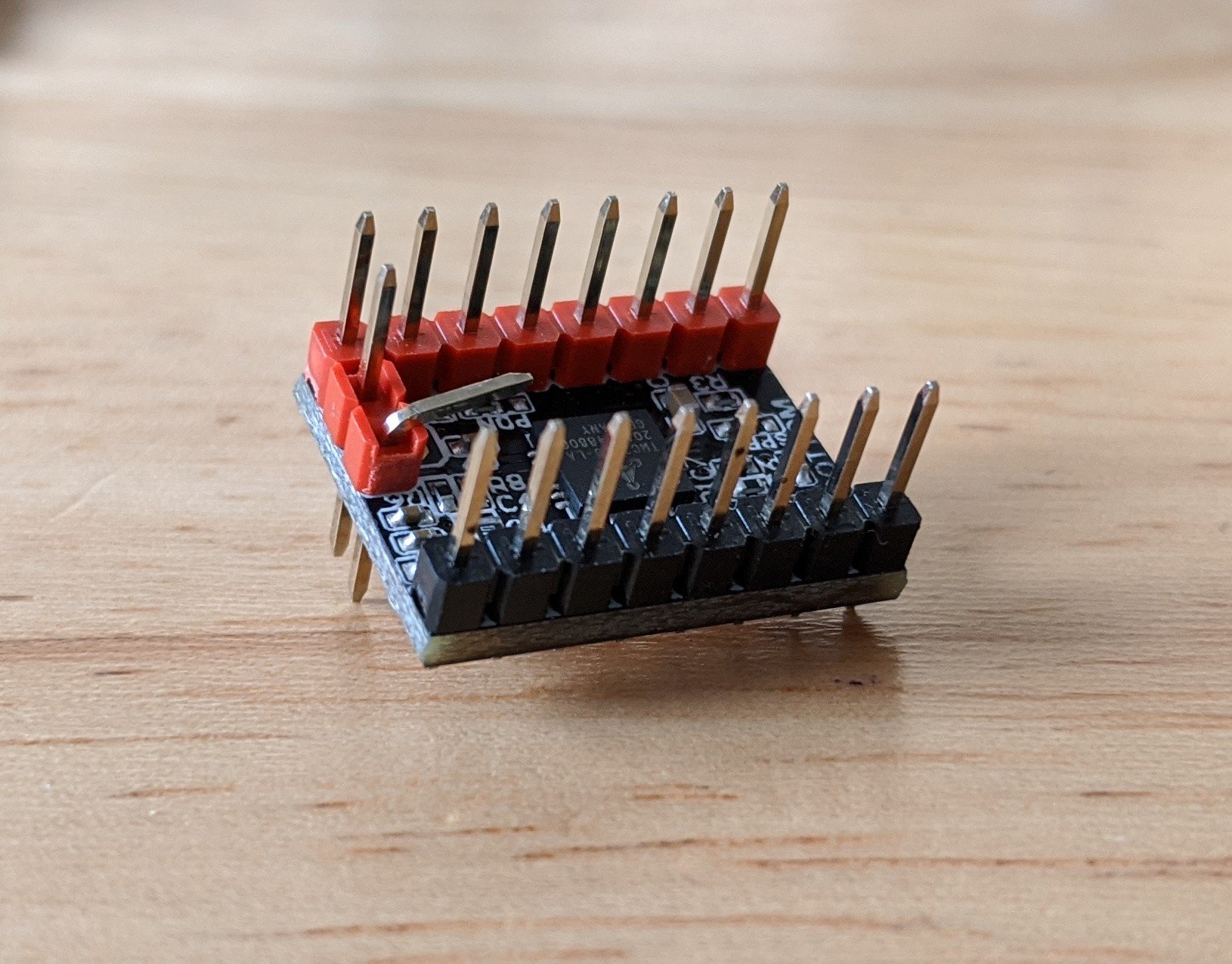
Sensorless homing is not as accurate as mechanical end stops. All the pre-compiled firmware has this disabled so you will need to bend the pins out of the way.
Bend this pin on each driver to allow mechanical switches to be used on the SKR board.
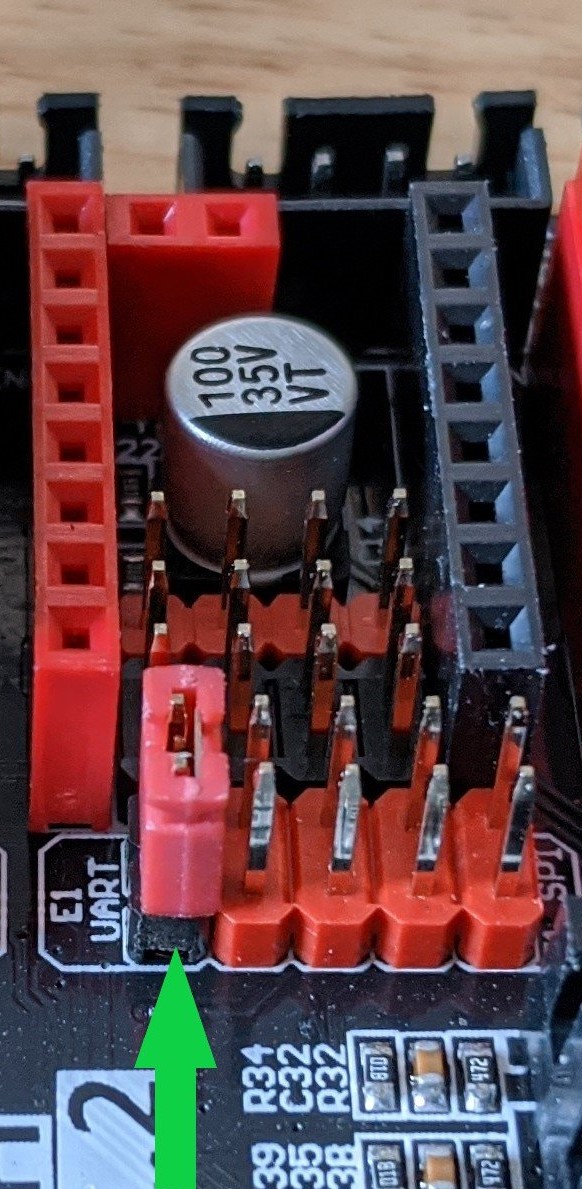
For the firmware to be able to control the current and receive feedback from each driver the board needs to be set for UART communication. To do this you remove the 4 jumpers from each port and place one jumper on the black (UART) pins. There is no need to monkey with the tiny potentiometers!
The completed board looks like this. Notice there are no jumpers under the drivers. Lowrider and MPCNC builds will have only 5 drivers, MP3DP uses 6.
I was getting the TMC connection error when I tried to reboot the Jackpot with only the USB powering the board. I know you’re using a SKR, but is there a chance that the error is being caused by the sequence that the power is applied to the board?
Ok during lunch I checked the board. Uart jumpers were on BUT I found a jumperless jumper (plastic but no metal insert) on the ZUart. that fixed the 2 issues above, Thanks All! … However I still have one remaining problem. About once every second in my terminal window Marlin is generating the line S_XYZ:0. Any ideas?