Hopefully not, but the second 2 are for a 3D printer’s heated bed. When that gets turned on, the input gets connected to the output. For safety and “less to go wrong” I would disconnect those. Do leave the other two, they are needed.
As to a problem… look closely at the polarity labels. They are not + - + - + - but + - + - - + + - the “Hot Bed” output is reverse polarity, so this will result in a short circuit to your power supply. Bad news!
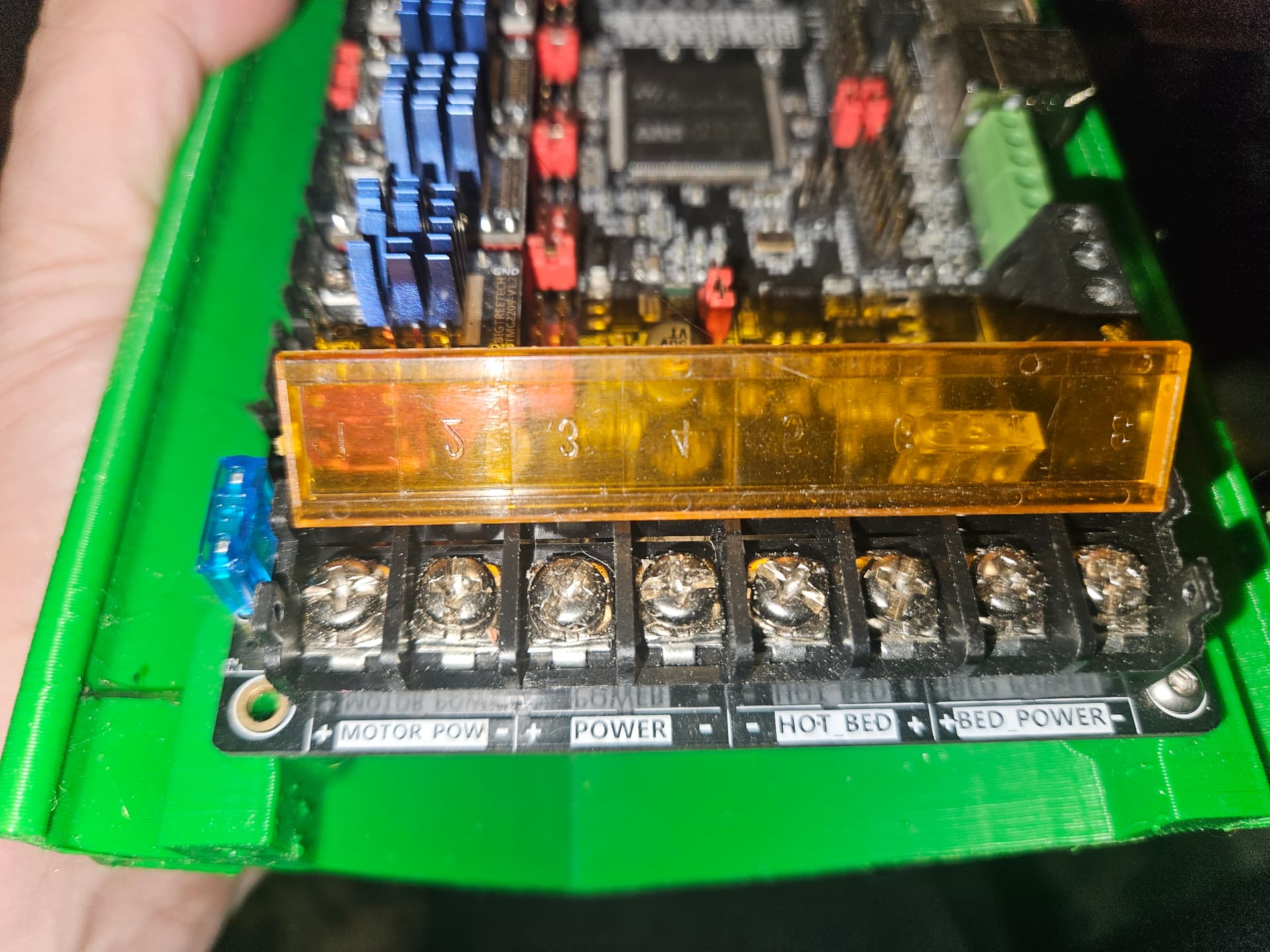
… you will want to disconnect the “Hot Bed” and “Bed Power” wires…