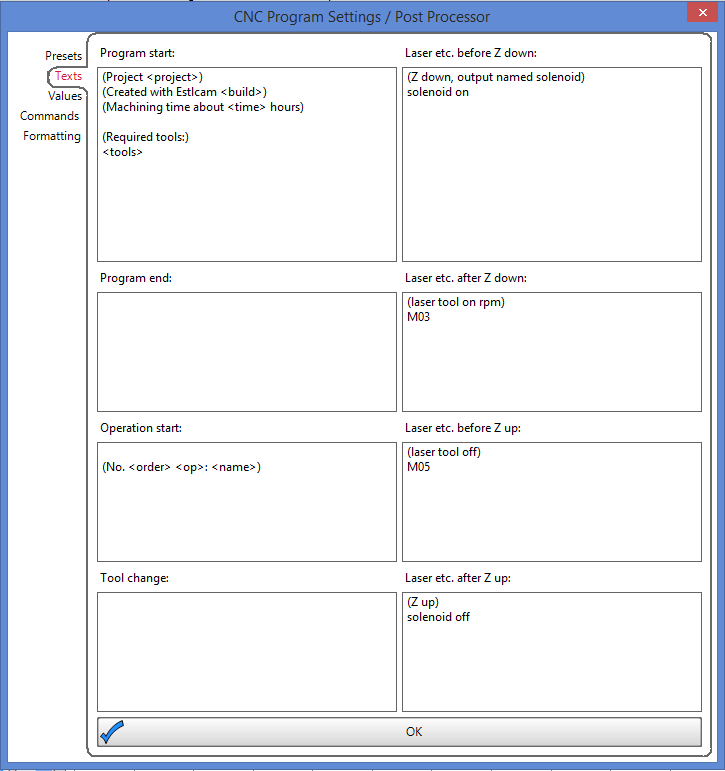
This post is missing some important information included in your earlier post (EstlCAM Arduino Spindel Question). Am I correct in saying that you are using a pneumatic cylinder to move a spindle to a fixed depth and that you want the spindle to turn on when it reaches that depth and to turn off before it retracts? Are you only using the machine for fixed depth/width on-the-line engraving? If so, using the Estlcam firmware, the v12 laser tool for the spindle on/off/rpm and an output pin for the solenoid (via a 5v relay) will work… GRBL should be doable with the appropriate PP Texts, e.g. solenoid on would be M07 or M08 and off would be M09