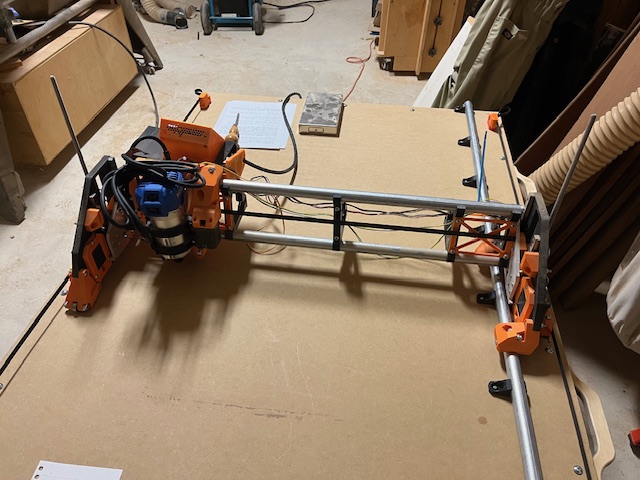
So, I finally got a table built and the LR3 mounted, and am now testing, squaring, and trying to get ready to cut strut plates. BUT - when I mounted the router (Kobalt) and did a Z axis up/down, I found that the Z servo at one end will stall if the router is toward that end. In other words, with the core at X=0 the Z axis at the 0 end will stall. With the core at Xmax, the Z servo at the Xmax end will stall. With the core in the center, everything is good.
Thinking this through, I wondered if the driver current was too low. I found the settings on the SKR board and increased the current from 900mA in increments until I got to 1200mA and everything smoothed out.
So I’m really a newbie at this, and I’m wondering if I did the right thing? Or is there something else I should be looking at?
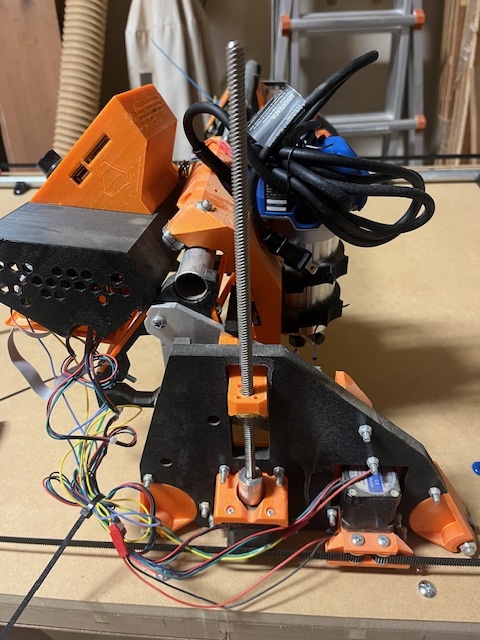
I think he was wanting a picture showing a close-up of the lead screw where it goes through the threads (easier to explain if you have two photos - with the threaded part at both the top and then the bottom of the travel)
Ah - I think I understand. If for example the motor mount was loose the top of the leadscrew would move vertically relative to the top of the YZ as the mount “climbed”. Assuming that’s correct, I did measure with the beam up and down and got identical measurements from the top of the YZ to the top of the leadscrew - on both ends. In any case, here is a close up photo to draw on in the event I’m still confused - please pardon the sloppy initial wiring…
After letting the TopCote dry, I restored the default current drive level(900mA) and tested and it works fine. I used the TopCote thinking sawdust would bind to white lithium grease or an oil and bind up the lead screws. If there’s a better way let me know.
While poking around on this, I found a possible contributing factor. I didn’t have clearance between the top of the Z couplers and the bottom of the lead screw nut when the beam was all the way down. Fixed that