I’ve gotten my LR4 complete and finally booted up. Going through small steps to verify each motor was plugged in correctly. When I worked my way up to the 100mm movements the Y Max would run fine, but the Y Min wouldn’t go as far and the machine would tilt on the table, pulling the Y Max off of it’s rail. I looked through the forum and found the ‘check your grub screws’ answer, so I tore the thing apart thinking ‘clearly that is the answer as to why it is moving a little but, just not as much as the other side’.
Nope.
Grub screws are fine. Now the fun begins.
With the machine on its side and the YMin motor extracted I booted it back up to test them. The YMax motor still runs when I step it, but now the YMin one doesn’t move at all.
So I swap the motor into the X port on the Jackpot controller to check if the motor is bad. Jogging the Xaxis moves the motor. But when plugged back into YMin, it doesn’t work. This tells me the motor is fine, does that mean something is wrong on the board?
What can I do next to test/narrow down the error further?
What board are you using and exactly what ports are things plugged into? Posting a picture of the board (and connections) may be helpful for those in the know.
Okay, I uploaded the config file you linked and still have the same issue. When everything is plugged in, the YMax motor will jog, but the YMin does not. Switching the plug for YMin to the X plug on the board and rebooting allows me to jog the YMin motor.
Those diags say that FluidNC is able to intialize and communicate with all of the stepper driver modules. That doesn’t rule out a bad TMC2209 module, but it does say that the ESP-32 and Jackpot are electrically able to communicate with the driver.
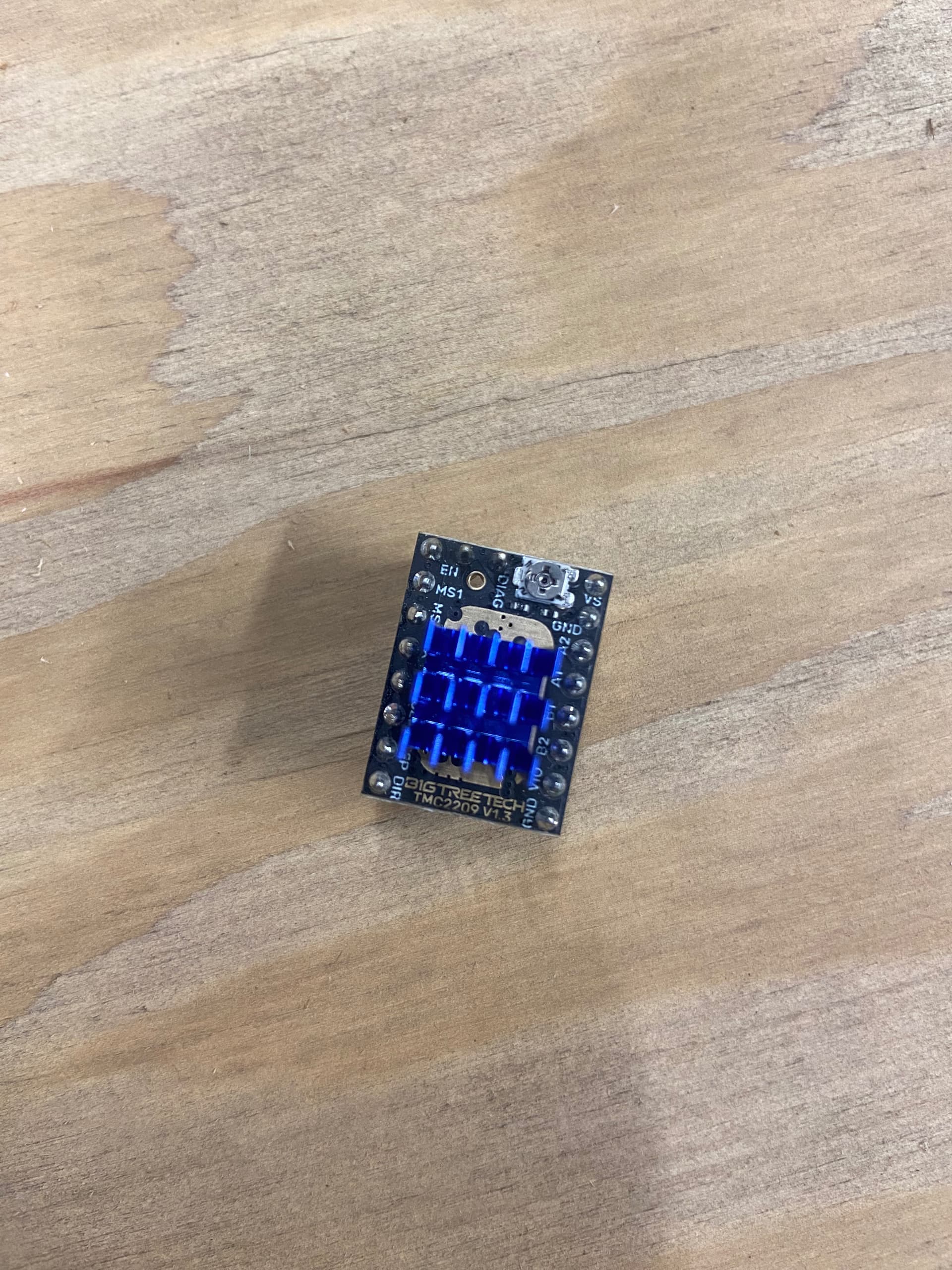
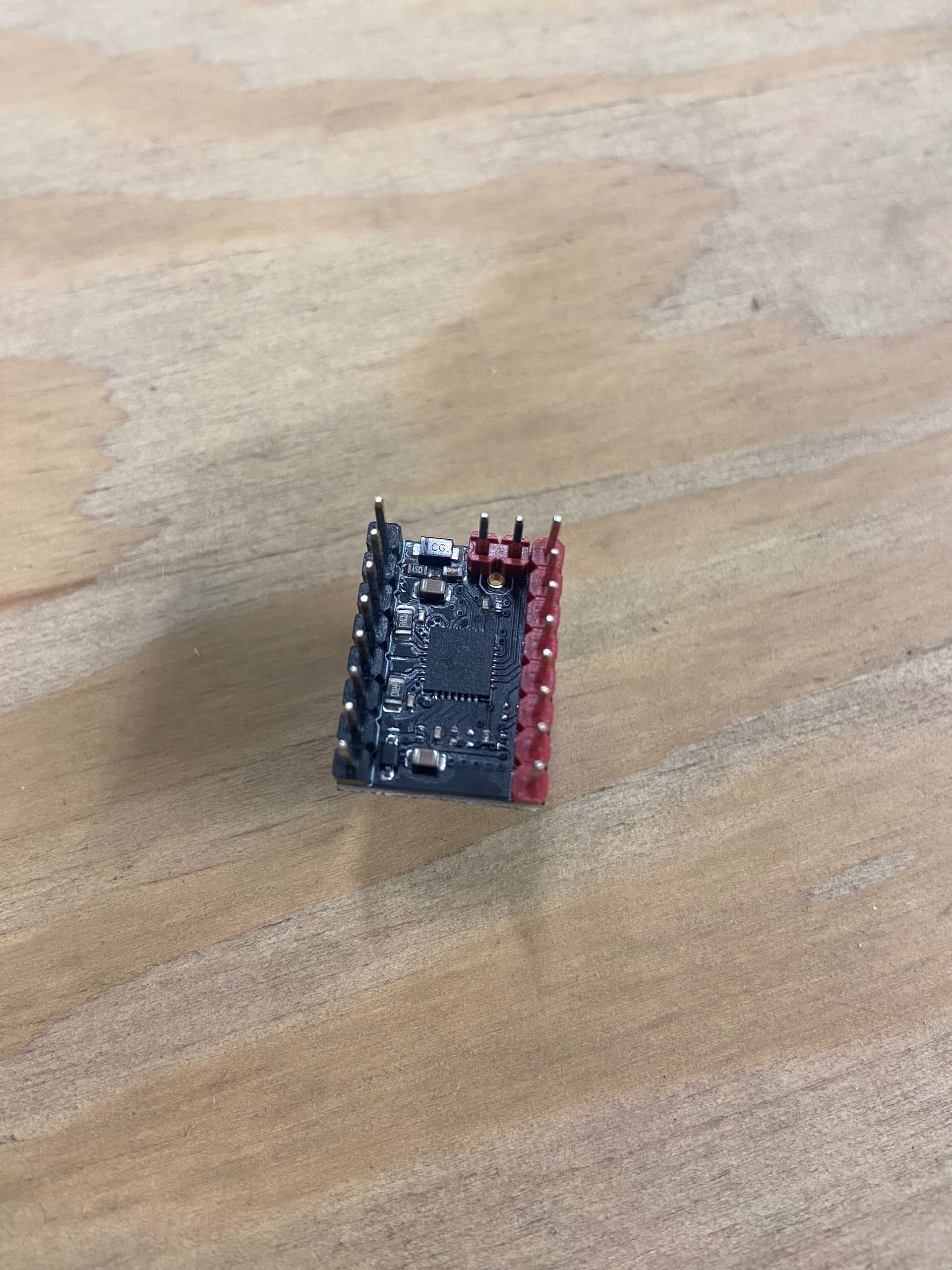
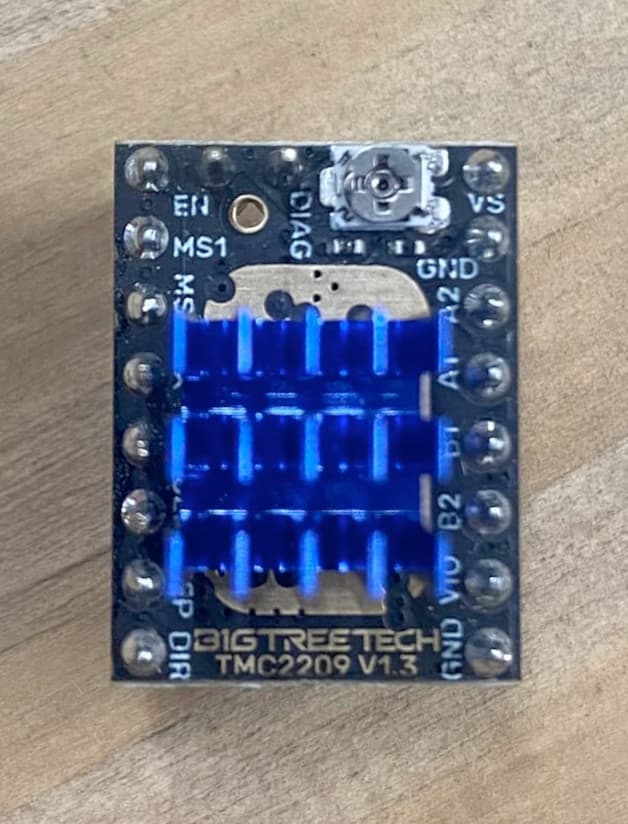
You could post high-resolution front and back side images of the driver that appears to be misbehaving.
I’d replace the driver, pending anything we might see wrong with those photos.