So my lowridier v4 when Y set to 10mm motor0 gows 2-3mm and motor1 gows 5mm. i have the Jackpot board and i had to change the Z1 from port B to C.
The mashine is squere i think but the ishu is that is dreailin once i move the Y.
Aswell as i tried to runt the crown file without any sucsess of that. In the yaml file there is nowere to corect the steps pur each driver where i can see. and mi geting error that TMC drivers are mising on startup with $SS. If any can help will be appreciated.
Welcome to the forum!
What does $SS say when you type that in the terminal? Can you copy / paste that here?
You may want to check the gear pulleys to make sure that they are identical. Some people have inadvertently mixed 16 tooth and 20 tooth pulleys, and ended up with results like you are experiencing.
Ok Im away for the day from the workshop but tomorow i will upload the $SS result image of the board and the config.yaml file. I dont think the gear pulleys are difrent as i bought them together (16 tooth).
Thanks
Are the motors also identical - there are 0.9 and 1.i degree stepper motors, if you had one of each I guess that’s what it would do.
That’s what some other people here thought, and then found out that one incorrect pulley was shipped along with the rest being correct ones…
Doesn’t hurt to double check.
Some people have also found the belt riding on the outer rim of one pulley instead of against the teeth, which affected the distance on that pulley.
1 Like
Yes the motor are idetical Nema 17 84oz.
So will attach all of the info that i can get.
The $SS is:
Grbl 3.9 [FluidNC v3.9.7 (wifi) '$' for help]
$SS
[MSG:INFO: FluidNC v3.9.7github. com /bdring/FluidNC]
[MSG:INFO: Compiled with ESP32 SDK:v4.4.7-dirty]
[MSG:INFO: Local filesystem type is littlefs]
[MSG:INFO: Configuration file:config2.yaml]
[MSG:INFO: Machine LowRider]
[MSG:INFO: Board Jackpot TMC2209]
[MSG:INFO: UART1 Tx:gpio.0 Rx:gpio.4 RTS:NO_PIN Baud:115200]
[MSG:INFO: UART2 Tx:gpio.14 Rx:gpio.13 RTS:NO_PIN Baud:1000000]
[MSG:INFO: uart_channel2 created at report interval: 75]
[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21Min Pulse:2us]
[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19]
[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000]
[MSG:INFO: Stepping:I2S_STATIC Pulse:2us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms]
[MSG:INFO: User Digital Output: 0 on Pin:gpio.26]
[MSG:INFO: User Digital Output: 1 on Pin:gpio.27]
[MSG:INFO: Axis count 3]
[MSG:INFO: Axis X (3.000,818.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110]
[MSG:INFO: Neg Limit gpio.25]
[MSG:INFO: Axis Y (3.000,1171.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110]
[MSG:INFO: Neg Limit gpio.33]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110]
[MSG:INFO: Neg Limit gpio.35]
[MSG:INFO: Axis Z (-297.000,3.000)]
[MSG:INFO: Motor0]
[MSG:INFO: tmc_2209 UART1 Addr:4 CS:I2SO.22 Step:I2SO.21 Dir:I2SO.20 Disable:I2SO.23 R:0.110]
[MSG:INFO: Pos Limit gpio.39]
[MSG:INFO: Motor1]
[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110]
[MSG:INFO: Pos Limit gpio.34]
[MSG:ERR: X Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Y Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Y2 Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Z Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Z2 Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:INFO: Kinematic system: Cartesian]
[MSG:INFO: Connecting to STA SSID:VSA]
[MSG:INFO: Connecting.]
[MSG:INFO: Connecting..]
[MSG:INFO: Connected - IP is 192.168.1.90]
[MSG:INFO: WiFi on]
[MSG:INFO: Start mDNS with hostname:http:// fluidnc .local/]
[MSG:INFO: HTTP started on port 80]
[MSG:INFO: Telnet started on port 23]
[MSG:INFO: Flood coolant gpio.2]
[MSG:INFO: Mist coolant gpio.16]
[MSG:INFO: Probe gpio.36:low]
ok
And the config.yaml file is :
board: Jackpot TMC2209
name: LowRider
meta: 03-15-2024 RyanZ
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 2
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.0
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
uart2:
txd_pin: gpio.14
rxd_pin: gpio.13
rts_pin: NO_PIN
cts_pin: NO_PIN
baud: 1000000
mode: 8N1
uart_channel2:
uart_num: 2
report_interval_ms: 75
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50
max_rate_mm_per_min: 9000
acceleration_mm_per_sec2: 200
max_travel_mm: 815
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 300
seek_mm_per_min: 1500
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: gpio.25
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.11
run_amps: 0.8
homing_amps: 0.8
hold_amps: 0.75
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: i2so.1
step_pin: i2so.2
disable_pin: I2SO.0
y:
steps_per_mm: 50
max_rate_mm_per_min: 9000
acceleration_mm_per_sec2: 200
max_travel_mm: 1168
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 300
seek_mm_per_min: 1500
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: gpio.33
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4
tmc_2209:
uart_num: 1
addr: 1
cs_pin: NO_PIN
r_sense_ohms: 0.11
run_amps: 0.8
homing_amps: 0.8
hold_amps: 0.75
microsteps: 32
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: i2so.5
direction_pin: i2so.4
disable_pin: I2SO.7
motor1:
limit_neg_pin: gpio.35
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.11
run_amps: 0.8
homing_amps: 0.8
hold_amps: 0.75
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: i2so.13
direction_pin: i2so.12
disable_pin: I2SO.15
z:
steps_per_mm: 200
max_rate_mm_per_min: 1200
acceleration_mm_per_sec2: 80
max_travel_mm: 300
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 3
feed_mm_per_min: 300
seek_mm_per_min: 800
settle_ms: 500
seek_scaler: 1.1
feed_scaler: 1.1
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.39
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4
tmc_2209:
uart_num: 1
addr: 4
cs_pin: i2so.22
r_sense_ohms: 0.11
run_amps: 0.8
homing_amps: 0.8
hold_amps: 0.75
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: i2so.21
direction_pin: i2so.20
disable_pin: I2SO.23
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.19
r_sense_ohms: 0.11
run_amps: 0.8
homing_amps: 0.8
hold_amps: 0.75
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: i2so.18
direction_pin: i2so.17
disable_pin: I2SO.16
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: gpio.2
mist_pin: gpio.16
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
fault_pin: NO_PIN
estop_pin: NO_PIN
macros: {}
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: NO_PIN
digital3_pin: NO_PIN
The Stepper motors are the same, the Gear pullies are the same. I had similar ishu with the Z axis thats why now one of them is in C slot.
Thank you for the help.
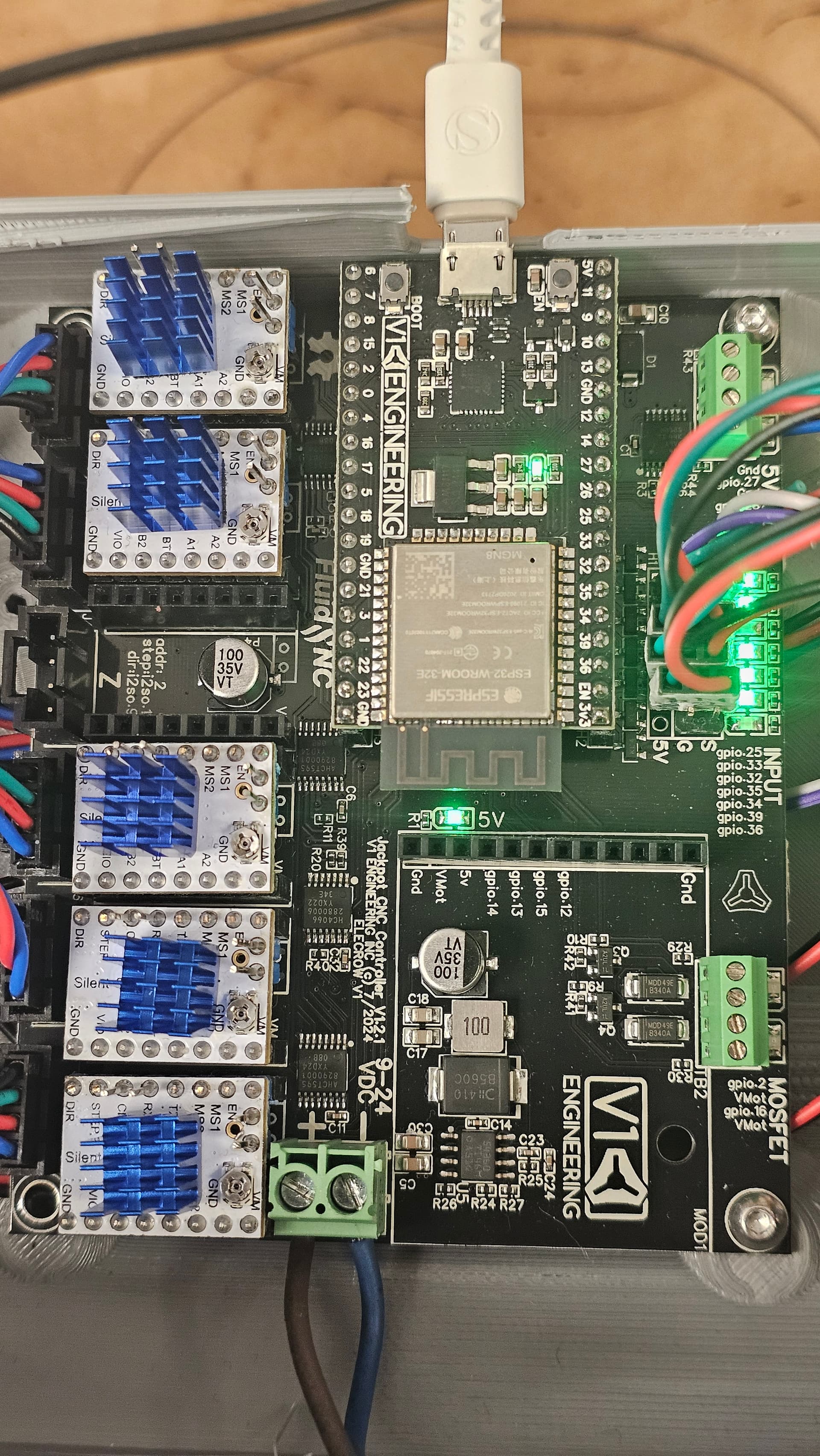
Why do you have a USB cable plugged in?
You need to power up the board from its DC supply before plugging in a USB cable or this happens:
[MSG:ERR: X Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Y Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Y2 Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Z Axis TMC driver not detected - expected 0x21 got 0x0]
[MSG:ERR: Z2 Axis TMC driver not detected - expected 0x21 got 0x0]
Can you power it up with the USB disconnected and run $SS again please?
Edit: oh and have you checked the stepper pulley grub screws are secure?
So i have checked the grub screws and they are tight.
I furst power on the cnc then i conect it to the laptop to see $SS. It gives the same outcome.
And chekt if there are any gunk or thing that is on the pullie.
Thanks
Are those TMC2209 stepper drivers?
Yes they are

Your TMC2209 module UARTS are not communicating with FluidNC.
You will not get correct motion until FluidNC can correctly configure the Drivers.
Some TMC2209 drivers need to have zero ohm jumpers moved around on them to correctly set the UART pinout. Your modules may be that type.
Willchek that i think i have to remove MS1 and MS2 pins
Did you change Motor 0 for some reason? Ryan’s config.yaml doesn’t have that.
You need to change Motor 0’s microsteps to 8 also. Then they should move the same amount.
So i think the drivers are wrong a plugged in a difrent tmc2209 and i had Y working fine and corected the microscopes to 8. But i accidentally plugged in one of the drivers wrong and blown up the ESP32 So now i haved orderd a new one and will chek and update.
Hopefully i havent damaged the jackpot controler.
Thanks for all the help
1 Like