I am still very new here and am not quite sure if I write everything correctly here. Please forgive me if it should not be so. I have built a Primo and (as far as I can tell) very well aligned. Im homing the machine with 4 placeholders and I think this is working great. Now I have the following error pattern. As soon as I move the axes
This happens randomly. Does anyone have experience with this error?
In a little town lives a Mr. Brown
He’s a decent man
Monday time to work -
Sunday time for church
He does what he can
After that short musical detour let’s get back to your question: It is really hard to tell what exactly is happening without a video of what it is doing or a more specific explanation. We also need to know which controller you use, because of different settings. Jerking sounds like a too high acceleration that the motors can’t slow down in time when the direction changes.
Another option could be loose grub screws. That’s always a possibility.
Hey Phillip,
thank you very much for your reply. I like that song Can I upload the video directly here or do I have to share it via YouTube?
Thank you very much.
A few people now using the SKR Pro have forgotten to put it in UART mode (changing the jumper settings for the drivers) causing driver current problems.
Well, in the video I can definitely hear the motors skipping, so it isn’t grub screws.
That showed at the top if Y travel, so it would be good to check that the Y rails are both straight and parallel. Check that motion is relatively free all the way across in both X and Y with the machine unpowered. It looks OK and the Primo can actually tolerate a little unevenbess there, so improbable.
Another possibility is wiring. If you have a connection between the motor wire and an extension in that drag chain, check that the problem is not when the drag chain tries to bend at that part of the wire. I had a similar issue where one of my crimps was less than great, and when that part of the wire tried to bend, I’d have a problem.
Edit: you can check by moving the drag chain around while trying to move the axis. If yoh can make it happen or stop by flexing the drag chain, you have probably found the issue
It looks great, I really like the little standoffs that stabilize the feet. What Dan says sounds pretty solid, I can’t see any problems. Did you have a look at what happens below the truck with the pulleys and idlers? Is anything on the wrong way so the belt gets stuck maybe?
Thank you very much I thought so too. I adjusted the pulleys, so the belts go right in the middle of the pulleys. But im gonna check it tomorrow one more time.
Hello Riley,
This is an Arduino with an simple CNC Shield. The motors are wired in parallel. I control it with Estlcam. Its a German Software solution for Controlling CNCs.
Most of the people here use Estlcam for the generation of the toolpaths, not as a controller though. So it is well known. I use it with an OpenCNC Shield 2 as well, I like the comfort features, the only drawback is the USB cable.
Your English is very good. It is much better than my German. I only know you a little and I can tell you are very smart. Thank you for sharing and talking in the videos.
When you disconnected the power and pushed or pulled on the truck, it seems too sticky. The tension on the bearings may be too high. It should be easier to move it when unpowered. A lot of the rigidity comes when the motors are engaged.
We are asking a lot about the controller because we want to make sure each motor has enough current. We give about 900mA to each motor by default.
3a. When you say each motor is wired in “parallel”, do you mean each motor has its own motor driver? Or do you have two motors wired in parallel to one driver?
3b. Are you sure the motor driver current setting is adjusted?
Intermittent wiring issues are the worst. But if nothing else checks out, then it may be a loose wire. I wouldn’t worry about this until you’re convinced it isn’t 2 or 3.
The computer is fine. Most of the speed dependent parts happen in the arduino. If the laptop pauses, the job will briefly pause, but not skip steps. An old raspberry pi can handle it, your laptop can too.
The belts look good. The build generally looks great. I am excited to see what you build after you get past this issue.
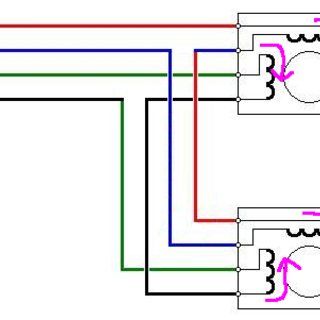
It is considered much better to wire thess in series, rather than parallel. Parallel wiring may not split the current evenly between the motors, and puts a heavier load on the drivers.
Series wiring runs the current through both motors, this ensures both get the exact same amount and puts an easier load on the.driver.
With this, you set the Vref on your polulo stepper drivers to about 900mA you will be fine for power. Otherwise you need fo set it to about 1800mA
There is a downside. With the drivers in series, the maximum motor speed is reduced. With 12V power supplies, this maximum speed is still faster than we typically want for CNC milling.
Hey Guys,
thank you so much for your help. You had the right suggestions… The problem was really the screws from the pulleys. The are silver and smooth, so its really hard to check if they are soinning freely. So i draw a line wihe the marker on them…and found out some of them did not move at all.
Now its all fine. Im gonna make my firs cut tomorrow.