Hello,
I’m having some difficulties with my new Jackpot 3 controller in my LR4, which is an update from the SKR pro board.
I wired up the board, and tried to get connected - it kept on saying that it couldn’t connect to the board with wifi. So I went on to the forum and saw the issue where a few boards went out with that issue and could be fixed by going onto the fluidNC site and updating the firmware. So I did that (just the update) and had the same problem. I then did the re-install, which flushed the settings, but I could finally launch the web UI. I then went to the V1 releases website and downloaded the 3.9.9 w/ UI v3 JP3_LR.zip file, and used the installer’s file browser to install the files from the zip file.
I now am able to see the endstops working when using the calibrate function, but I can’t seem to get any of the steppers to move. Every time I try to jog it, I get a 500 internal error. I suspect there’s an issue with the yaml file, but with my limited experience I don’t know what I’m looking for. The error file is below, and I have enclosed the yaml file.
Hope someone can help!
Cheers,
Dave
# ERROR FILE
\[MSG:INFO: FluidNC v4.0.2 https://github.com/bdring/FluidNC\]
\[MSG:INFO: Local filesystem is /littlefs\]
\[MSG:INFO: Configuration file:config.yaml\]
\[MSG:INFO: Machine LowRider\]
\[MSG:INFO: Board Jackpot3 TMC2226\]
\[MSG:INFO: UART1 Tx:gpio.16 Rx:gpio.4 RTS:NO_PIN Baud:115200\]
\[MSG:INFO: I2SO BCK:gpio.22 WS:gpio.17 DATA:gpio.21Min Pulse:2us\]
\[MSG:INFO: SPI SCK:gpio.18 MOSI:gpio.23 MISO:gpio.19\]
\[MSG:INFO: SD Card cs_pin:gpio.5 detect:NO_PIN freq:20000000\]
\[MSG:INFO: Stepping:I2S_STATIC Pulse:2us Dsbl Delay:0us Dir Delay:1us Idle Delay:255ms\]
\[MSG:INFO: User Digital Output: 0 on Pin:gpio.26\]
\[MSG:INFO: User Digital Output: 1 on Pin:gpio.27\]
\[MSG:INFO: User Digital Output: 2 on Pin:gpio.0\]
\[MSG:INFO: User Digital Output: 3 on Pin:gpio.2\]
\[MSG:INFO: Axis count 3\]
\[MSG:INFO: Axis X (3.000,1223.000)\]
\[MSG:INFO: Motor0\]
\[MSG:INFO: tmc_2209 UART1 Addr:0 CS:NO_PIN Step:I2SO.2 Dir:I2SO.1 Disable:I2SO.0 R:0.110\]
\[MSG:INFO: X Neg Limit gpio.25\]
\[MSG:INFO: Axis Y (3.000,2443.000)\]
\[MSG:INFO: Motor0\]
\[MSG:INFO: tmc_2209 UART1 Addr:1 CS:NO_PIN Step:I2SO.5 Dir:I2SO.4 Disable:I2SO.7 R:0.110\]
\[MSG:INFO: Y Neg Limit gpio.33\]
\[MSG:INFO: Motor1\]
\[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.14 Step:I2SO.13 Dir:I2SO.12 Disable:I2SO.15 R:0.110\]
\[MSG:INFO: Y2 Neg Limit gpio.35\]
\[MSG:INFO: Axis Z (-147.000,3.000)\]
\[MSG:INFO: Motor0\]
\[MSG:INFO: tmc_2209 UART1 Addr:2 CS:NO_PIN Step:I2SO.10 Dir:I2SO.9 Disable:I2SO.8 R:0.110\]
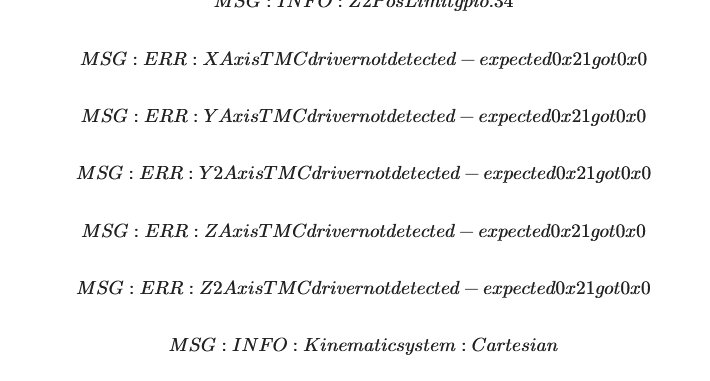
\[MSG:INFO: Z Pos Limit gpio.32\]
\[MSG:INFO: Motor1\]
\[MSG:INFO: tmc_2209 UART1 Addr:3 CS:I2SO.19 Step:I2SO.18 Dir:I2SO.17 Disable:I2SO.16 R:0.110\]
\[MSG:INFO: Z2 Pos Limit gpio.34\]
\[MSG:ERR: X Axis TMC driver not detected - expected 0x21 got 0x0\]
\[MSG:ERR: Y Axis TMC driver not detected - expected 0x21 got 0x0\]
\[MSG:ERR: Y2 Axis TMC driver not detected - expected 0x21 got 0x0\]
\[MSG:ERR: Z Axis TMC driver not detected - expected 0x21 got 0x0\]
\[MSG:ERR: Z2 Axis TMC driver not detected - expected 0x21 got 0x0\]
\[MSG:INFO: Kinematic system: Cartesian\]
\[MSG:INFO: STA SSID is not set\]
\[MSG:INFO: AP SSID FluidNC IP 192.168.0.1 mask 255.255.255.0 channel 1\]
\[MSG:INFO: AP started\]
\[MSG:INFO: WiFi on\]
\[MSG:INFO: Captive Portal Started\]
\[MSG:INFO: HTTP started on port 80\]
\[MSG:INFO: Telnet started on port 23\]
\[MSG:INFO: HTTP command registered\]
\[MSG:INFO: Probe gpio.36:low\]
YAML FILE
board: Jackpot3 TMC2226
name: LowRider
meta: 11-01-2025 RyanZ
planner_blocks: 32
stepping:
engine: I2S_STATIC
idle_ms: 255
pulse_us: 2
dir_delay_us: 1
disable_delay_us: 0
uart1:
txd_pin: gpio.16
rxd_pin: gpio.4
rts_pin: NO_PIN
baud: 115200
mode: 8N1
axes:
shared_stepper_disable_pin: NO_PIN
x:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 1220
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#X
motor0:
limit_neg_pin: gpio.25:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 0
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
direction_pin: I2SO.1
step_pin: I2SO.2
disable_pin: I2SO.0
y:
steps_per_mm: 50.000
max_rate_mm_per_min: 9000.000
acceleration_mm_per_sec2: 200.000
max_travel_mm: 2440
soft_limits: false
homing:
cycle: 2
positive_direction: false
mpos_mm: 3
feed_mm_per_min: 300.000
seek_mm_per_min: 1500.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
#Y
motor0:
limit_neg_pin: gpio.33:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 1
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.5
direction_pin: I2SO.4
disable_pin: I2SO.7
#A
motor1:
limit_neg_pin: gpio.35:high
limit_pos_pin: NO_PIN
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.14
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.13
direction_pin: I2SO.12
disable_pin: I2SO.15
z:
steps_per_mm: 200.000
max_rate_mm_per_min: 900.000
acceleration_mm_per_sec2: 80.000
max_travel_mm: 150.000
soft_limits: false
homing:
cycle: 1
positive_direction: true
mpos_mm: 3
feed_mm_per_min: 300.000
seek_mm_per_min: 800.000
settle_ms: 500
seek_scaler: 1.100
feed_scaler: 1.100
motor0:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.32:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 2
cs_pin: NO_PIN
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
#B
motor1:
limit_neg_pin: NO_PIN
limit_pos_pin: gpio.34:high
limit_all_pin: NO_PIN
hard_limits: false
pulloff_mm: 4.000
tmc_2209:
uart_num: 1
addr: 3
cs_pin: i2so.19
r_sense_ohms: 0.110
run_amps: 0.800
homing_amps: 0.800
hold_amps: 0.700
microsteps: 8
stallguard: 0
stallguard_debug: false
toff_disable: 0
toff_stealthchop: 5
toff_coolstep: 3
run_mode: StealthChop
homing_mode: StealthChop
use_enable: false
step_pin: I2SO.18
direction_pin: I2SO.17
disable_pin: I2SO.16
# c:
# steps_per_mm: 80.000
# max_rate_mm_per_min: 5000.000
# acceleration_mm_per_sec2: 100.000
# max_travel_mm: 300.000
# soft_limits: false
# homing:
# cycle: 0
# positive_direction: true
# mpos_mm: 150.000
# feed_mm_per_min: 100.000
# seek_mm_per_min: 800.000
# settle_ms: 500
# seek_scaler: 1.100
# feed_scaler: 1.100
#
# motor0:
# limit_neg_pin: gpio.39:low
# limit_pos_pin: NO_PIN
# limit_all_pin: NO_PIN
# hard_limits: false
# pulloff_mm: 3.000
# tmc_2209:
# uart_num: 1
# addr: 3
# cs_pin: i2so.22
# r_sense_ohms: 0.110
# run_amps: 0.800
# homing_amps: 0.800
# hold_amps: 0.700
# microsteps: 8
# stallguard: 0
# stallguard_debug: false
# toff_disable: 0
# toff_stealthchop: 5
# toff_coolstep: 3
# run_mode: StealthChop
# homing_mode: StealthChop
# use_enable: false
# step_pin: I2SO.21
# direction_pin: I2SO.20
# disable_pin: I2SO.23
i2so:
bck_pin: gpio.22
data_pin: gpio.21
ws_pin: gpio.17
spi:
miso_pin: gpio.19
mosi_pin: gpio.23
sck_pin: gpio.18
sdcard:
cs_pin: gpio.5
card_detect_pin: NO_PIN
frequency_hz: 20000000
probe:
pin: gpio.36:low
toolsetter_pin: NO_PIN
check_mode_start: true
start:
must_home: false
coolant:
flood_pin: NO_PIN
mist_pin: NO_PIN
delay_ms: 0
control:
safety_door_pin: NO_PIN
reset_pin: NO_PIN
feed_hold_pin: NO_PIN
cycle_start_pin: NO_PIN
macro0_pin: NO_PIN
macro1_pin: NO_PIN
macro2_pin: NO_PIN
macro3_pin: NO_PIN
macros:
startup_line0:
startup_line1:
macro0:
macro1:
macro2:
macro3:
user_outputs:
analog0_pin: NO_PIN
analog1_pin: NO_PIN
analog2_pin: NO_PIN
analog3_pin: NO_PIN
analog0_hz: 5000
analog1_hz: 5000
analog2_hz: 5000
analog3_hz: 5000
digital0_pin: gpio.26
digital1_pin: gpio.27
digital2_pin: gpio.0
digital3_pin: gpio.2
##Pendant:
#uart2:
# txd_pin: gpio.15
# rxd_pin: gpio.12
# rts_pin: NO_PIN
# cts_pin: NO_PIN
# baud: 1000000
# mode: 8N1
#
#uart_channel2:
# report_interval_ms: 75
# uart_num: 2
#Laser:
# pwm_hz: 5000
# output_pin: gpio.2
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: true
# pwm:
# pwm_hz: 5000
# direction_pin: gpio.2
# output_pin: gpio.0
# enable_pin: NO_PIN
# disable_with_s0: false
# s0_with_disable: true
# spinup_ms: 0
# spindown_ms: 0
# tool_num: 0
# speed_map: 0=0.000% 1000=100.000%
# off_on_alarm: false
# Inputs left to right gpoi.25/33/32/35/34/39/36