Good morning,
Finally taking the time to setup my SKR Pro 1.2 with dual endstop, and I’m running into a few issues
Note: for testing, I’m on a bench, with a dupont wire to simulate the switch, connected between Signal and Ground.
Using firmware from the main repo, ie:
SKR : github.com)]Releases · V1EngineeringInc/MarlinBuilder · GitHub
Touchscreen: Releases · V1EngineeringInc/BIGTREETECH-TouchScreenFirmware · GitHub
Specifically:
https://github.com/V1EngineeringInc/MarlinBuilder/releases/download/515/V1CNC_SkrPro_DualLR_2209-2.1.1.zip
https://github.com/V1EngineeringInc/BIGTREETECH-TouchScreenFirmware/releases/download/3-2023/CNC.TFT.Package.zip
I checked all firmware, and revision number matches in the info screen (both on controller board and TFT board)
1/ Am I right to assume that for a given stepper motor (let’s say Y), if the corresponding sensor is triggered (ie Dupont wire is removed) during movement, it should stop movement ? Because… well it does not… I checked with M119 command, and the sensor input is indeed triggering when removing the wire, and open when the wire is installed
But X movement does not stop when X is removed.
Same for Y
2/ Firmware description states :
V1CNC_SkrPro_DualLR_2209-*** *** Ready for dual end stops on a LowRider CNC (Y & Z axes).
Am I to assume that endstop are enabled only for Y and Z, or does this actually rather mean that DUAL endstop are enabled for Y and Z, and single endstop for X ?
3/ Using the above firmware for the touchscreen, I can connect, but when homing, I get a M420 “command not found” error. I’ve read into another thread that this is a known issue that can be fixed by firmware, but I tried the firmware provided in the thread, but I could not flash it (it did not flash itself)
4/ there is a warning on the documentation: " Do not use the + (positive) pins or you will ruin your SKR Pro board. "
Of course I think I just did that, since when testing I plugged the end of the Dupont wire to the + pin (so signal and + were shorted). Yes, my eyesight is not what it used to be. Could this really damage the input pin of the sensor (in which case I’m toasted), or could this be another issue (such as the pull up resistor sensitivity - knowing that the other pins are fine). I suspect it’s damaged, I would assume the input pin is 3.3V tolerant only, so shorting 5V to 3.3V was not a good idea… But that said it’s on the z probe, so that does not explain why the other signals are not triggering a stop (even though M119 does report a trigger)
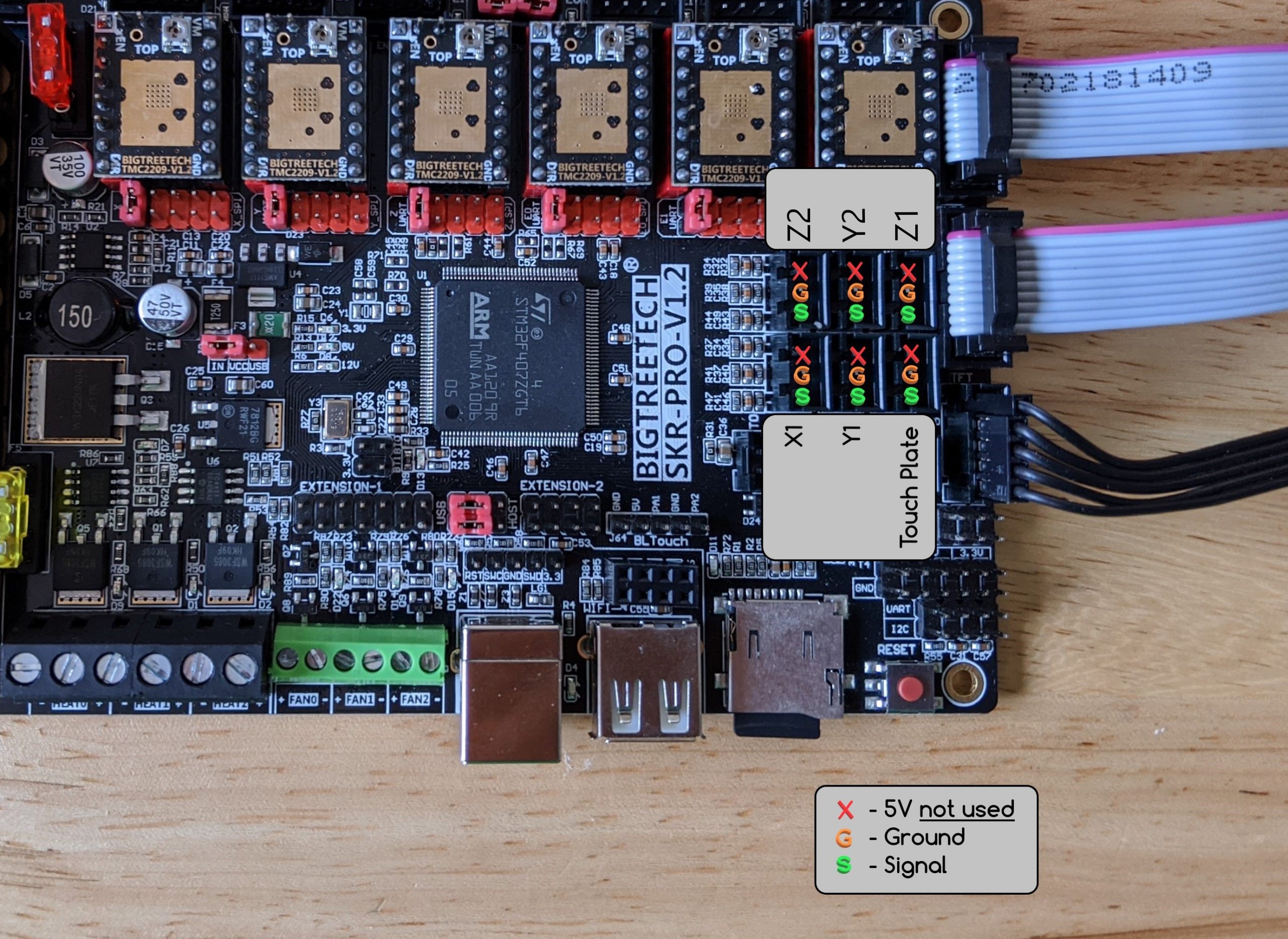
5/ Looks to me the wiring instructions for the sensors on the documentation is odd… Specifically, it is stated that E0 stepper output should be wired to Y2, E1 output to Z2. But according to the picture for the sensor input (https://docs.v1e.com/img/LR3_endstops.jpg), Y2 sensor is wired to E1, and Z2 sensor is wired to E0, so aren’t they reversed ? Which one is correct, stepper output or sensor input ?
{kind=link}
Comments welcome
Regards